AGV/AMR控制器--科聪
- 1 行业介绍
- 1.1 控制器概念
- 1.2 行业发展
- 1.3 竞争格局
- 2 科聪控制器 MRC5000
- 2.1 介绍
- 2.2 支持多种导航方式
- 2.3 适配各种轮系底盘
- 2.4 核心参数
- 2.5 优势
- 灵活的二次开发平台:机器人设计软件(xRobotStudio)
- 完备的实施调试工具:机器人应用软件(xRobotDesigner)
- 多智体调度管理:机器人调度监控软件xRobotAGVMonitor
- 远程状态实时监控管理:机器人管理平台(云端)xRobotCloud
- 3 对比
- 参考
1 行业介绍
1.1 控制器概念
AGV控制系统和无人驾驶一样涉及感知、决策、执行。
【感知】:传感器+定位+通信
AGV需要通过相关传感器及导航算法进行定位。
【决策】:信息融合后,进行任务决策、轨迹规划、异常处理
【执行】:轨迹跟踪后,进行转向控制、驱动控制、制动控制、安全控制

1.2 行业发展
- 1972年,科尔摩根AGV发布了第一代ACC系列车辆控制器,标志着控制器行业正式开启篇章。
- 2012年,亚马逊收购KIVA,二维码导航的机器人开始规模化应用于电商场景,标志性着控制器开始走向专机时代。
- 2016年左右,以仙工智能、科聪、科钛、宾通等为代表的企业,开启以SLAM导航为主的标准品控制器。正式迈入AMR专用控制器时代。
1.3 竞争格局
| 公司名称 | 相关情况 |
|---|---|
| 科尔摩根AGV | 1962年在瑞典成立,1972年发布第一代ACC系列车辆控制器,2003年推出第二代车辆控制器VMC500系列,2012年推出第三代车辆控制器CVC600系列,2020年发布第四代车辆控制器CVC700系列。目前科尔摩根正在研发的新一代车辆控制器CVC700 + 系列。 |
| 仙工智能 | 创始团队自2013年作为浙江大学代表队成员参加世界机器人足球大赛(RoboCup)时就开始积累控制器相关核心技术,是国内首个推出移动机器人控制器(SRC-500)的厂家,随后又陆续推出SRC-2000、SRC-3000、SRC-800等型号控制器。仙工智能主要提供激光SLAM自主导航控制器,用于支持客户自主制造移动机器人。 |
| 睿芯行 | 2019年,睿芯行首款基于X86平台的RBrain XM001工业控制器面世,可适配不同的客户群体和应用场景,如浙江中力,林德叉车等。2022年底推出基于ARM+FPGA平台的RBrain XM002系列控制器,性能进一步优化。 |
| 浙江科聪 | 2015年成立,2017年发布MRC5000主要针对叉式AGV/AMR、重载AGV/AMR、产线AGV/AMR应用,2017年同期开始研制MRC3000控制器,面向产线搬运型、仓储合装和复合型等AGV/AMR应用,于2019年正式发布。 |
| BlueBotics SA | 2001年成立,超过二十年的时间里一直在完善自然特征导航技术(品牌名ANT),以使AGV更容易安装和操作。在此期间,已经帮助客户公司开发了数十种ANT驱动的AGV、自动叉车和移动机器人。功能最强大的导航定位控制器产品名为ANT lite+。 |
| 科钛机器人 | 成立于2016年,同年推出核心控制器SmartGo,可以兼容多种车型,包括各种自主移动机器人、工业车辆,如顶升式AGV/AMR、背负式AGV/AMR、托盘叉车等;同时支持多种运动方式。 |
| 格局技术 | 2017年8月份推出第一代控制器,面向二维码导航应用场景;2018年推出二代产品,支持市面上主流的导航方式;2021年推出重要迭代版本,并启用GAC3作为全新产品标识。 |
| 易行机器人 | 2017年第一版移动机器人控制器投入使用,2019年第四版推出。2020年推出第五版移动机器人控制器,2021年第六版移动机器人控制器ECO400投入使用,开放程度再次升级。 |
| 成都河狸 | 成立于2019年,其AGV/AMR控制器共经历了四次迭代,第四代AGV/AMR控制器在原有的基础上实现在河狸智能所研发产品为软硬件集成的产品,主要包括移动机器人核心控制器、河狸智能群控系统及产品配套备件产品。 |
| 佳创博为 | 2016年佳创博为推出M4系列控制器,支持磁条导航,色带导航,惯性导航等多种导航方式。为了适应更多的应用场景以及非标开发能力,佳创博为还推出了一款具有底层导航功能及运动控制为一体的微型控制器,目前其系列产品已在多个行业应用。 |
2 科聪控制器 MRC5000
2.1 介绍

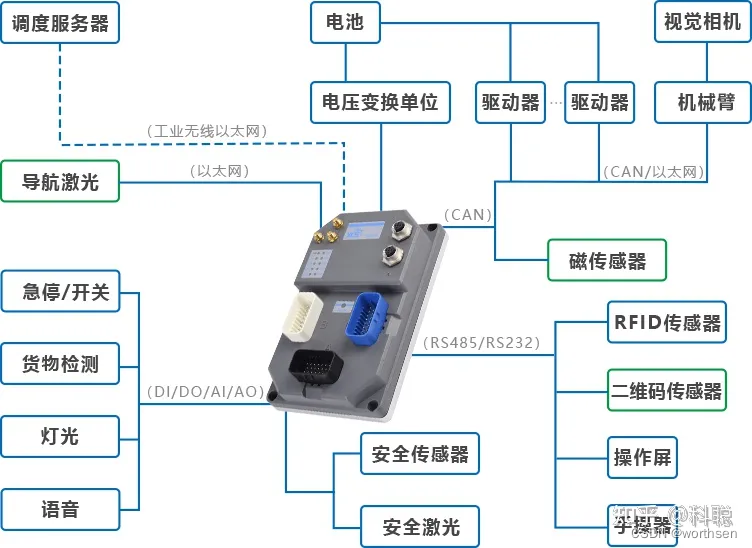
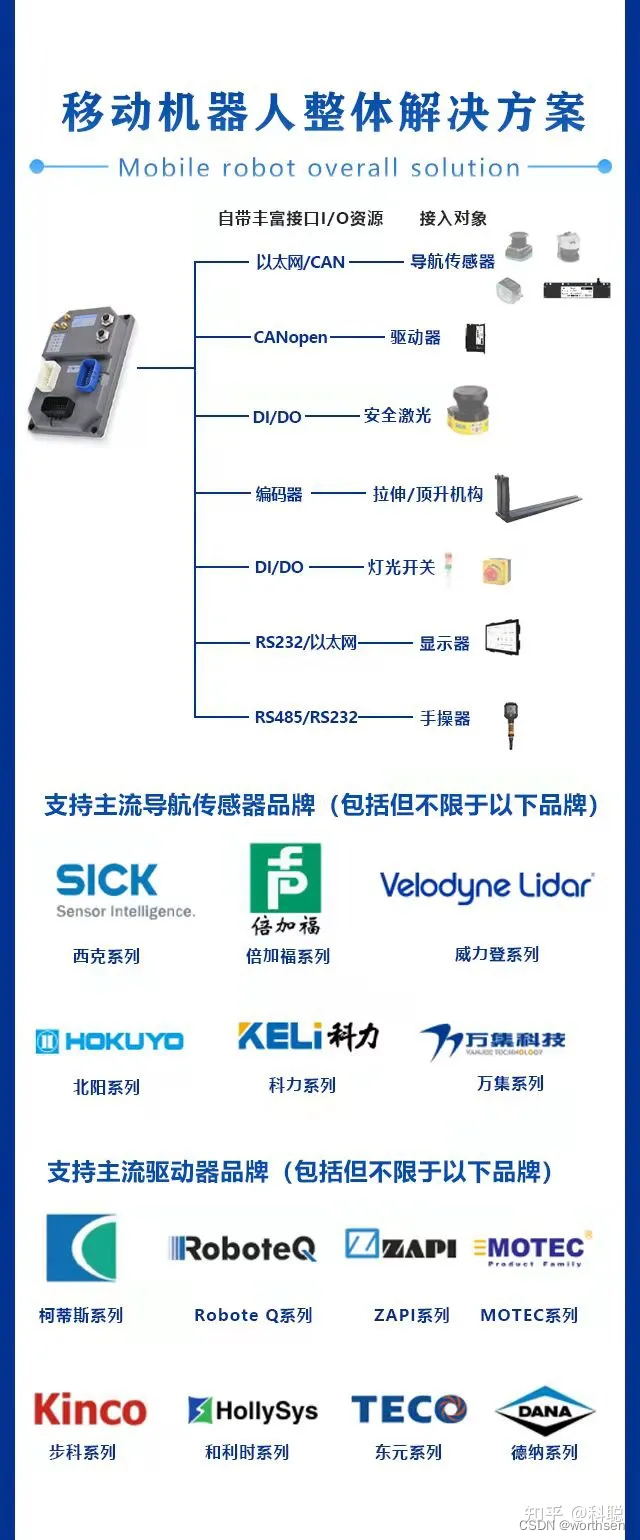

移动机器人自主导航控制器MRC5000,是一款全自主知识产品的移动机器人领域专业控制器产品。MRC5000具有高性能、高集成度、高可靠性等特点,MRC5000内置自然导航、激光导航、磁导航、二维码导航等多种导航算法,支持多种国内外常用型号导航传感器,具备具有防火墙功能,2.4G、5.8G、4G、5G等无线路由功能。MRC5000自带丰富的DI、DO、AI、AO资源和RS232、RS485、RS422、10/100M工业以太网通讯接口。不仅支持CANopen和Modbus等标准通讯协议,还支持采用非标的自定义串行和以太网通讯协议。使用者可通过图形化二次开发平台(符合IEC 6-1131/3标准),进行机器人各项功能逻辑的实现。产品通过CE认证。
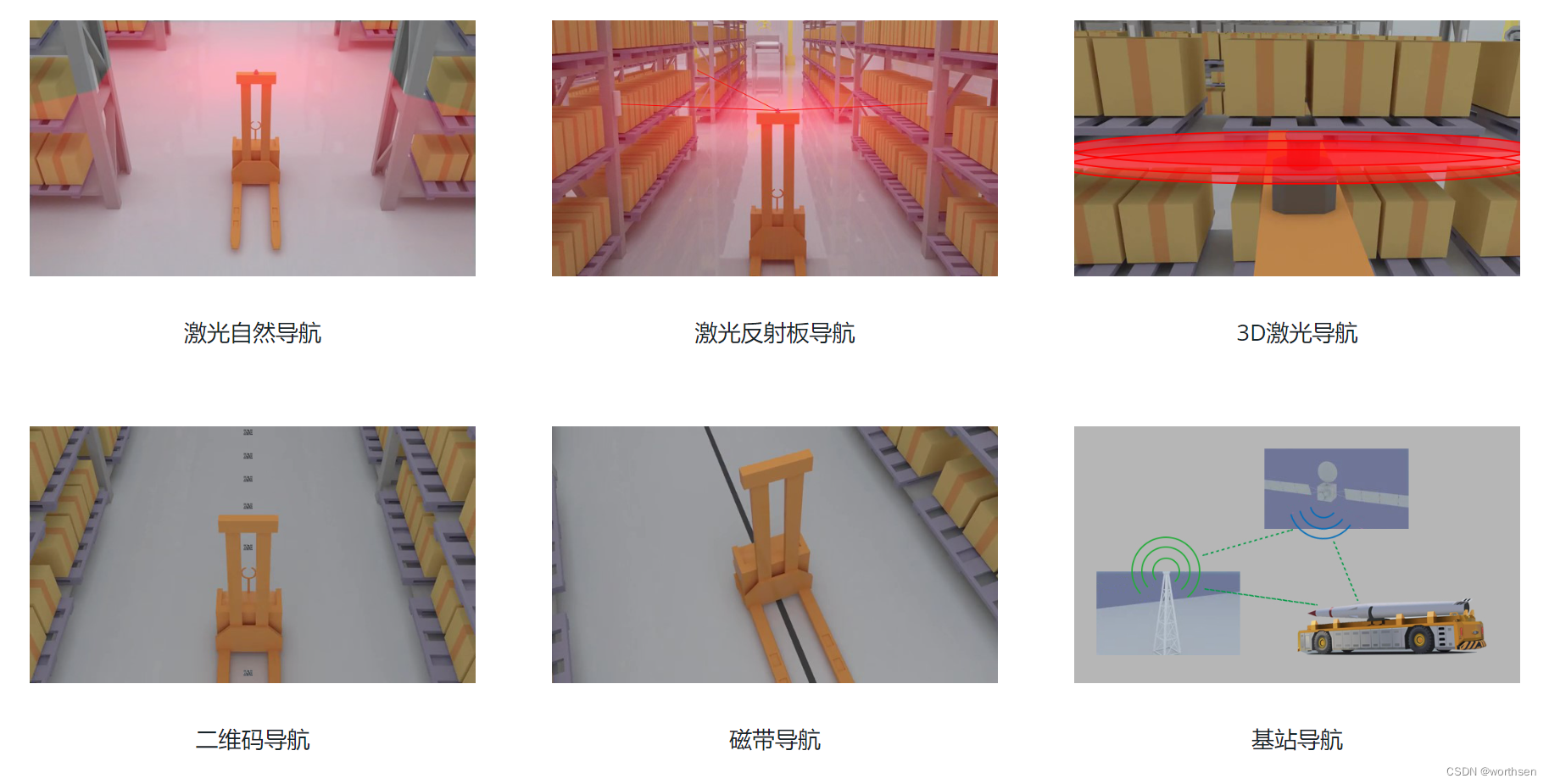
2.2 支持多种导航方式
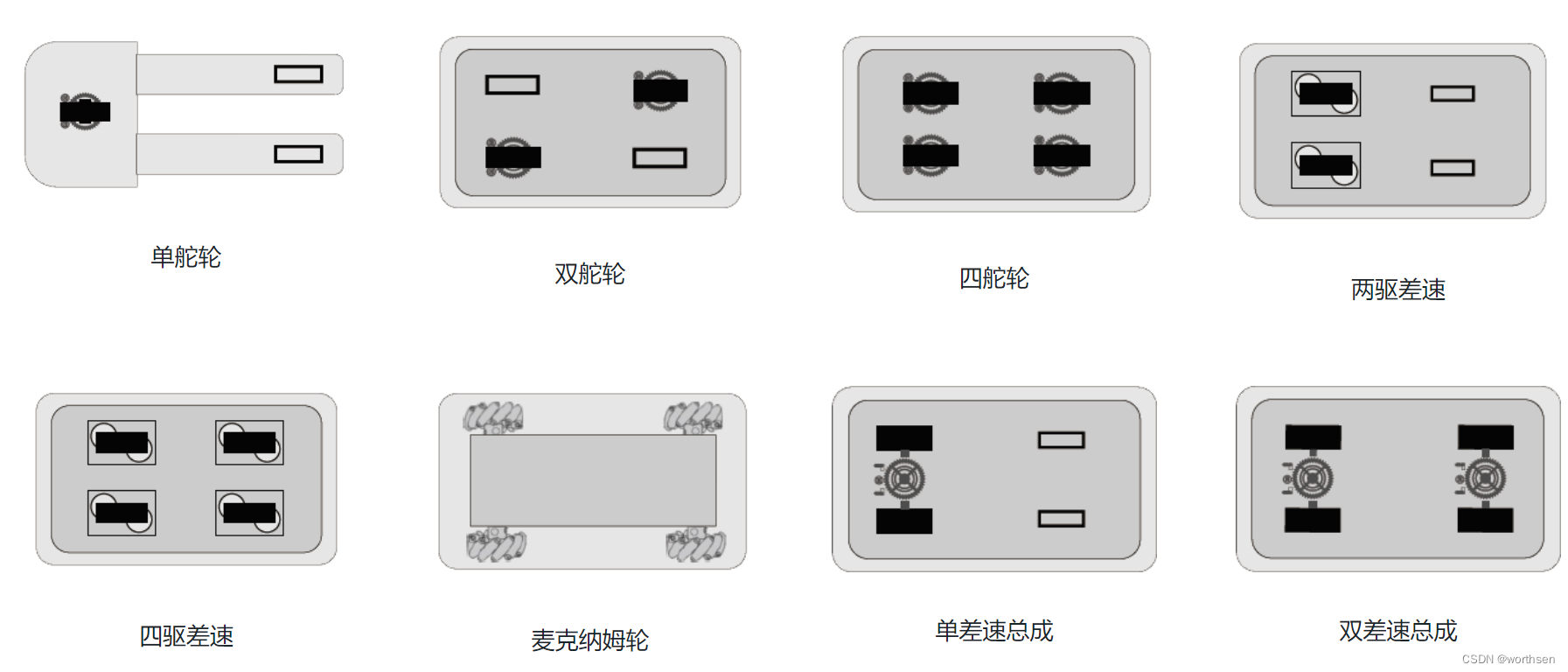
2.3 适配各种轮系底盘
2.4 核心参数

2.5 优势
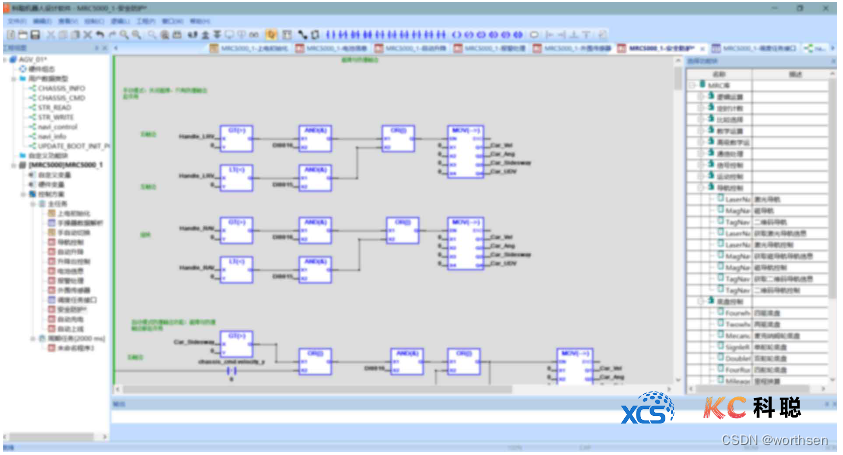
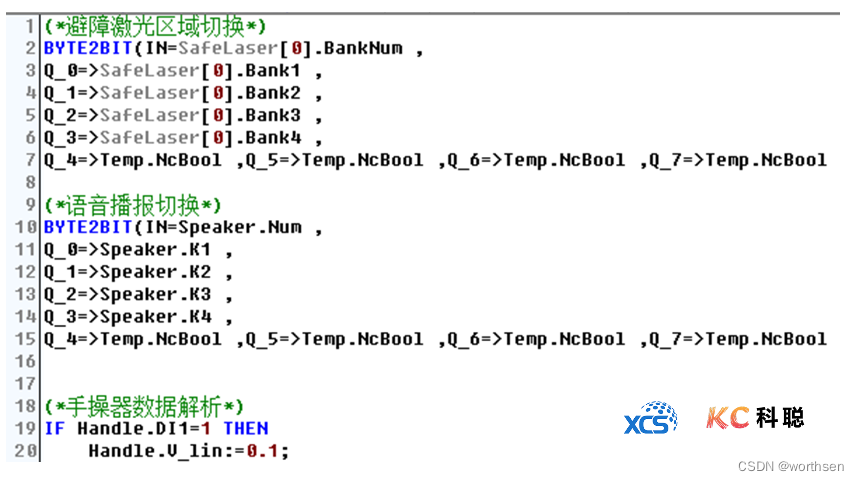
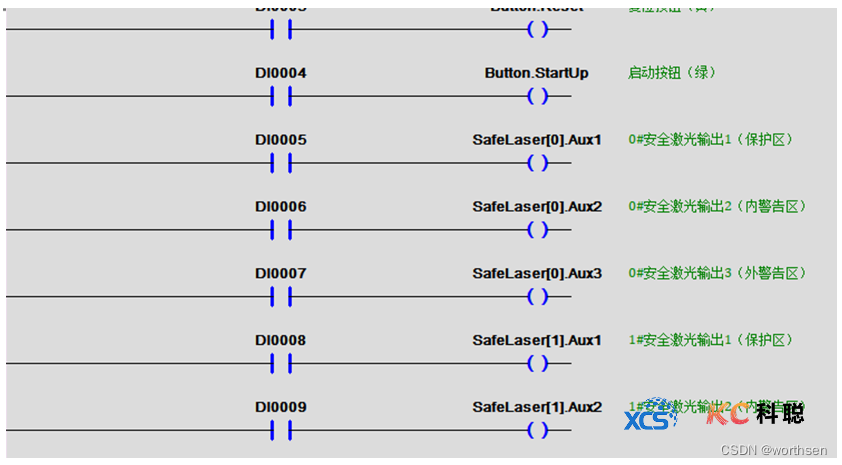
灵活的二次开发平台:机器人设计软件(xRobotStudio)
机器人设计软件(xRobotStudio)是专业的移动机器人功能逻辑组态软件,是机器人功能设计工程师的得力工具。xRobotStudio提供可视化的机器人硬件组态配置功能,采用符合IEC61131-3标准的图形化编程语言:梯形图(LD)、功能块图(FBD)、结构化文本(ST),实现功能控制逻辑。支持对异构通讯接入的CANopen、MODBUS等协议接口的第三方设备进行组态配置。软件内置逻辑应用基本功能块和专业的移动机器人行业应用功能块库,包括各种轮式底盘运动分解功能块和导航控制功能块,让您可以快速实现机器人的移动、导航、应用功能和通讯等功能。xRobotStudio提供联机功能可以方便的进行机器人的在线调试。并提供各种标定、诊断、维护工具软件,可以快速完成机器人应用功能实时验证。

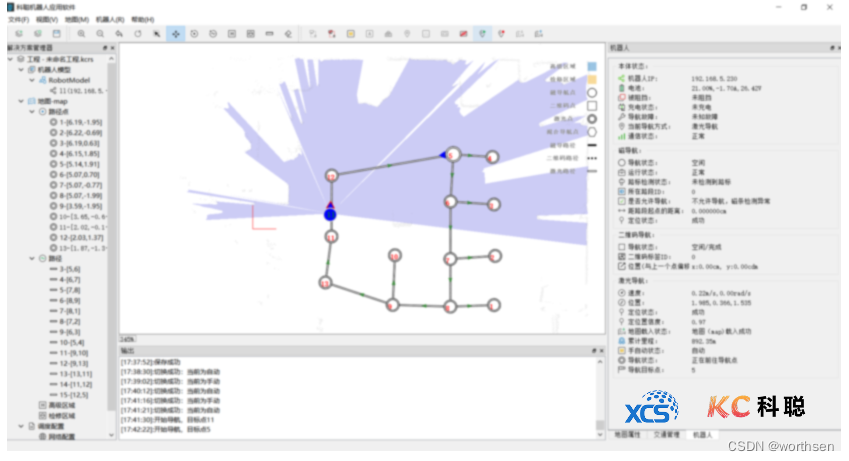
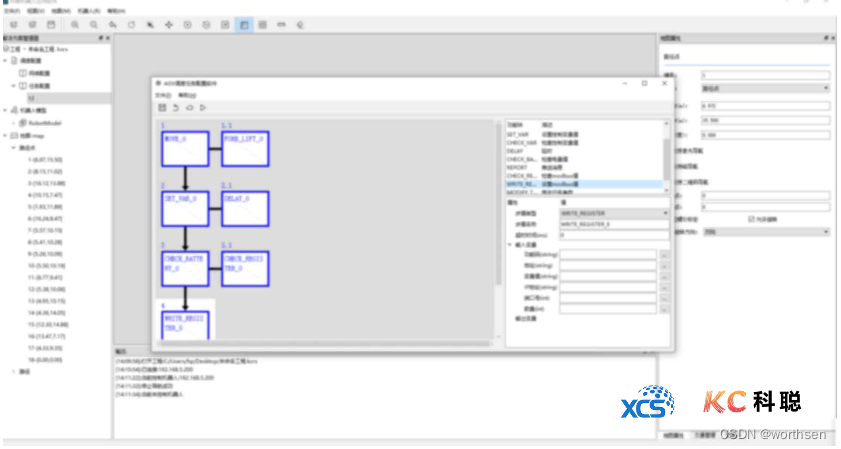
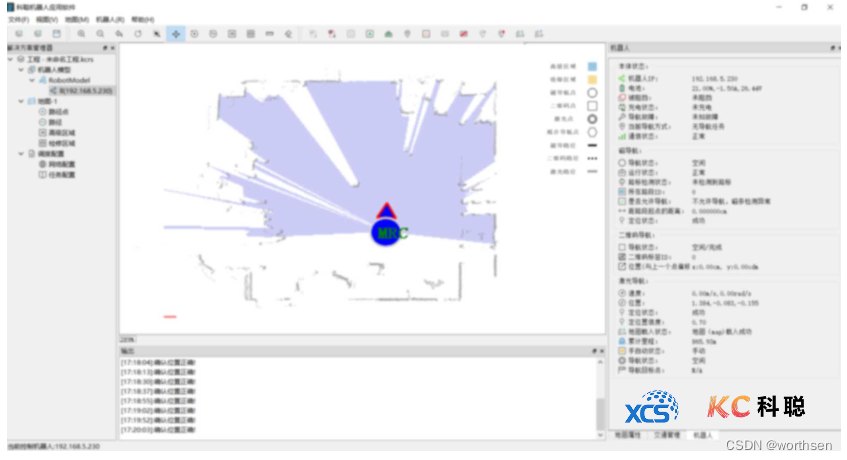
完备的实施调试工具:机器人应用软件(xRobotDesigner)
机器人应用软件(xRobotDesigner)是专业的机器人项目应用部署软件,是移动机器人实施工程师的强力助手。xRobotDesigner通过便捷的人机交互设计,可以让应用实施工程师可以在不同的应用场景,完成精确地图扫描、制图和机器人行驶路线规划功能,可通过图形化方式配置机器人所要完成的全部任务,快速高效的构建应用环境地图和完成应用功能部署。xRobotDesigner地图管理功能,可对多楼层应用实现便捷的地图管理。内置的机器人参数配置工具,使用者在项目实施过程中,可方便的调整机器人运行参数。xRobotDesigner将复杂的机 器人部署过程进行智能封装,可让实施工程师简单便捷的使用,达到快速高效部署的目 标。
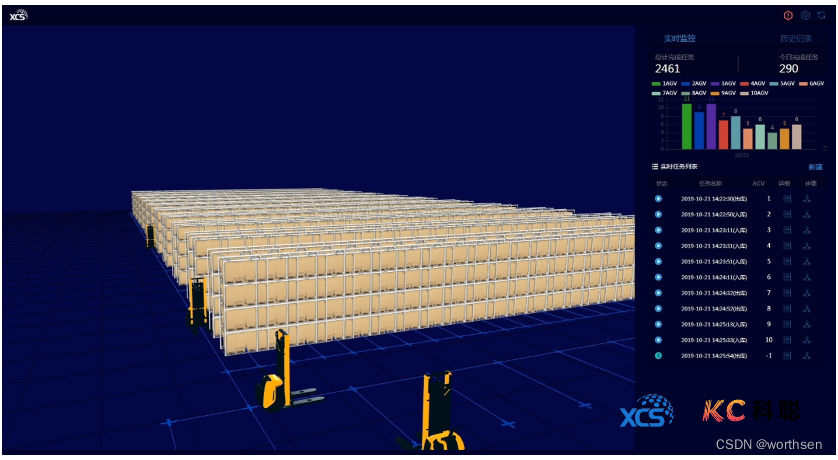
多智体调度管理:机器人调度监控软件xRobotAGVMonitor
机器人调度监控软件(xRobotAGVMonitor)是专业的机器人调度管理系统,具有对移动机器人和移动机器人使用场景的各种智体综合管理的智能管理软件,主要包括调度管理服务器系统和可3D监控显示的人机交互系统。xRobotAGVMonitor实现各种类型智能机器人的任务分配、交通调度、运行维护和监控显示等功能。调度系统采用多种 AI 智能调度算法,实现智能机器人工作任务的最优分配、多机器人路径规划和机器人交通管理等。并支撑在实际应用项目中,对智能机器人与智能机器人、智能机器人与自动化设备、智能机器人集群与集群间、智能机器人与人相互协同工作,从而发挥出移动机器人应用的最大效能。
远程状态实时监控管理:机器人管理平台(云端)xRobotCloud
机器人管理平台软件(xRobotCloud)是移动机器人专业的远程管理平台,可实现对各类型机器人的远程管理,平台可部署在公有云、私有云及混合云上。基于网络信息安全技术,可在远端,安全的监控机器人实时状态,生成机器人生产力报表数据和KPI数据等。
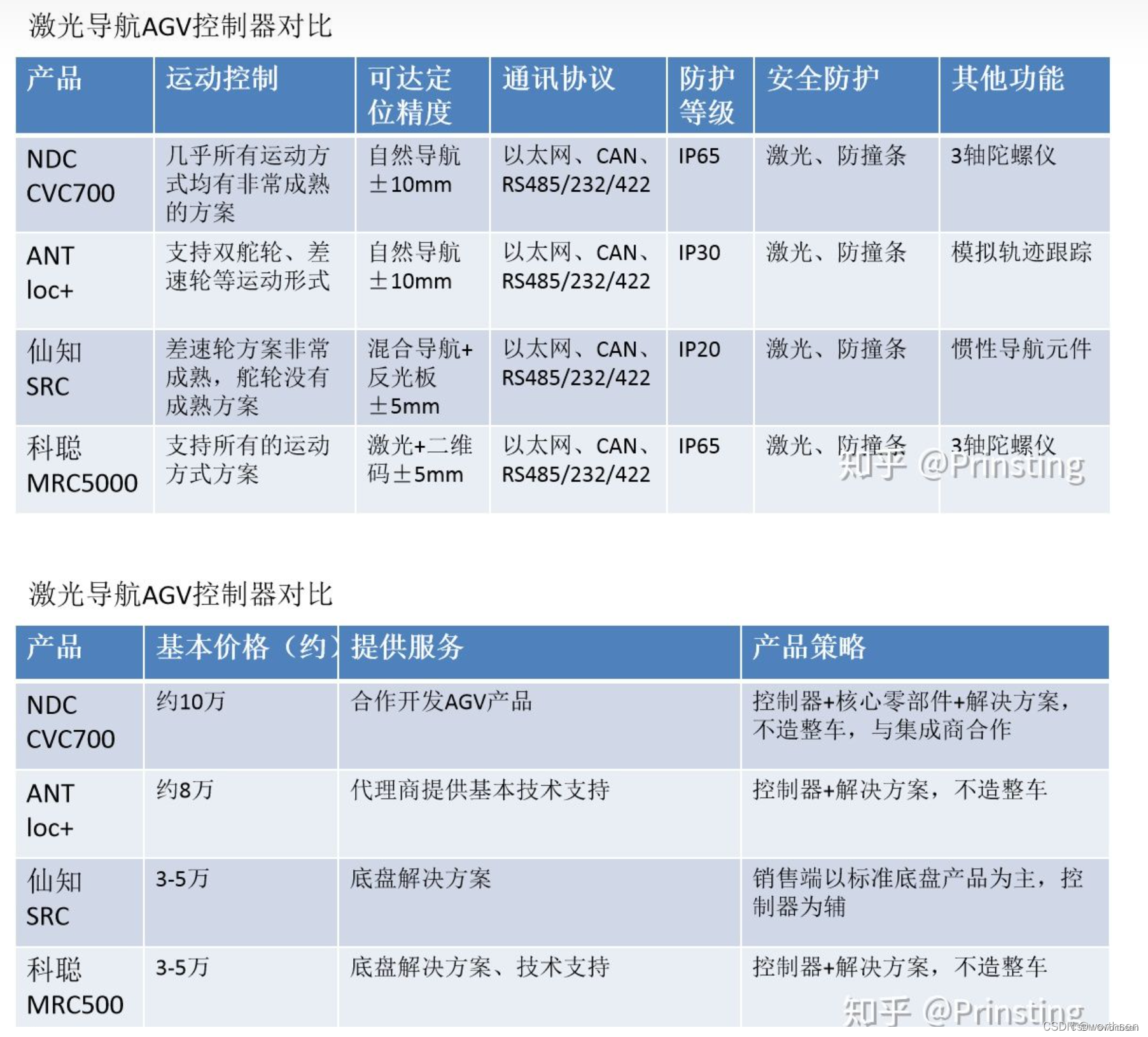
3 对比
参考
1、机器人开发–AGV控制系统
2、科聪官网
3、全方位解读AGV/AMR控制器市场现状(附业内首份控制器蓝皮书下载方式)