强化学习的Sarsa与Q-Learning的Cliff-Walking对比实验
- Cliff-Walking问题的描述
- Sarsa和Q-Learning算法对比
- 代码分享
- 需要改进的地方
- 引用和写在最后
Cliff-Walking问题的描述
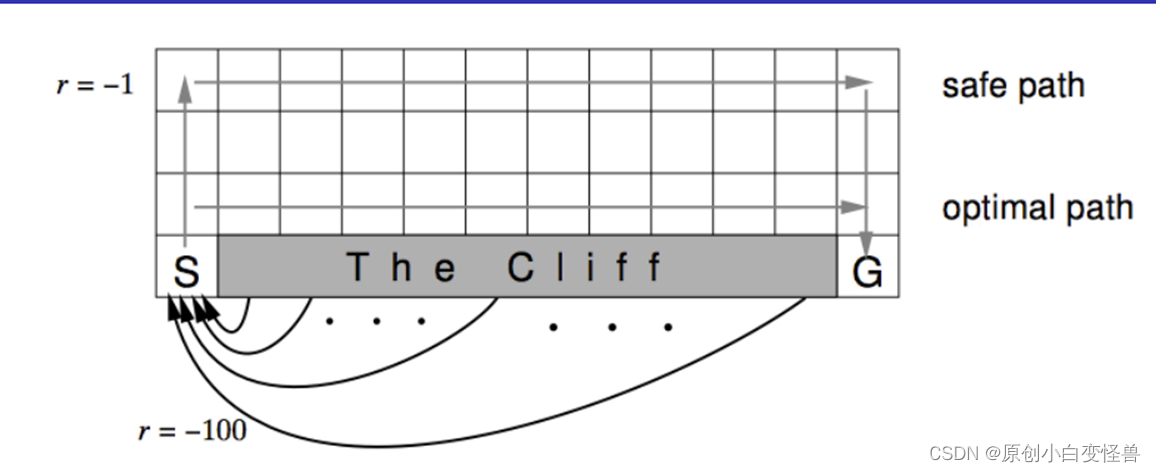
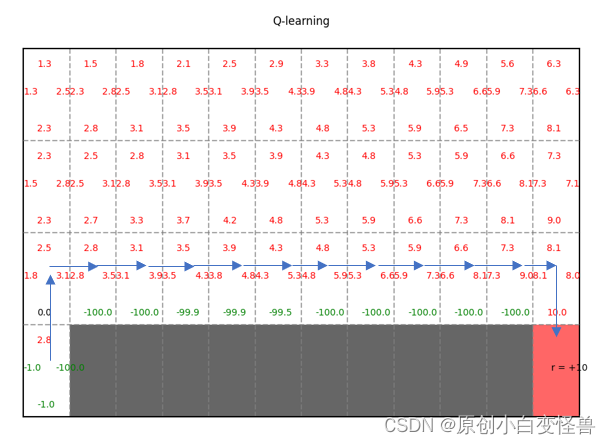
悬崖行走:从S走到G,其中灰色部分是悬崖不可到达,求可行方案
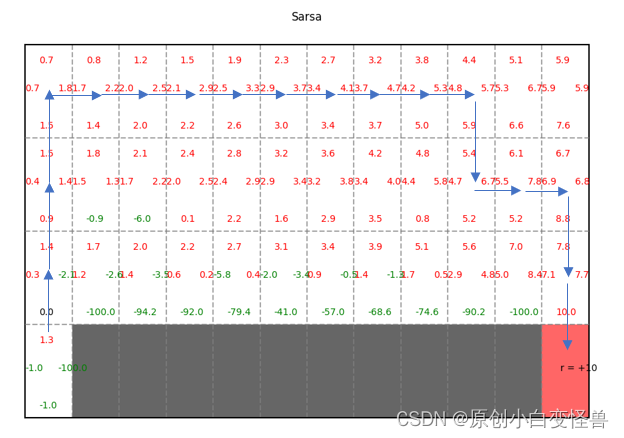
建模中,掉下悬崖的奖励是-100,G的奖励是10,原地不动的奖励-1,到达非终点位置的奖励是0(与图中的示意图不一致,不过大差不差),分别使用同轨策略的Sarsa与离轨策略的Q-learning算法,经过20000幕进化迭代得出safe path,optimal path,最后根据Q值来得出最终的策略,以此来对上图进行复现
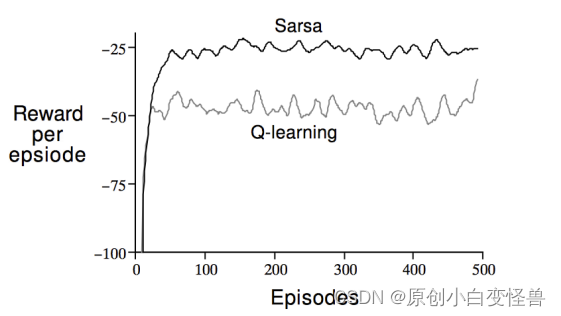
Sarsa和Q-Learning算法对比
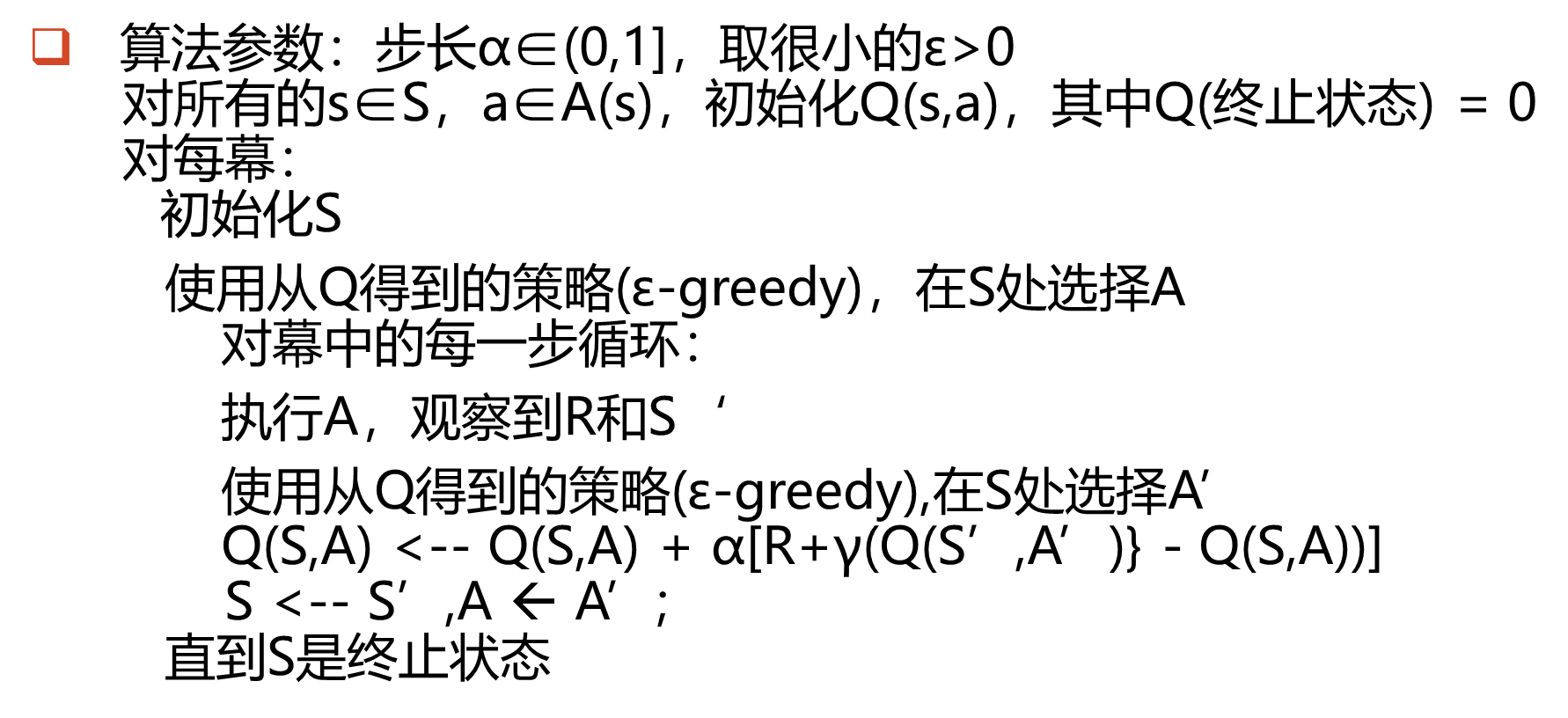
Sarsa算法
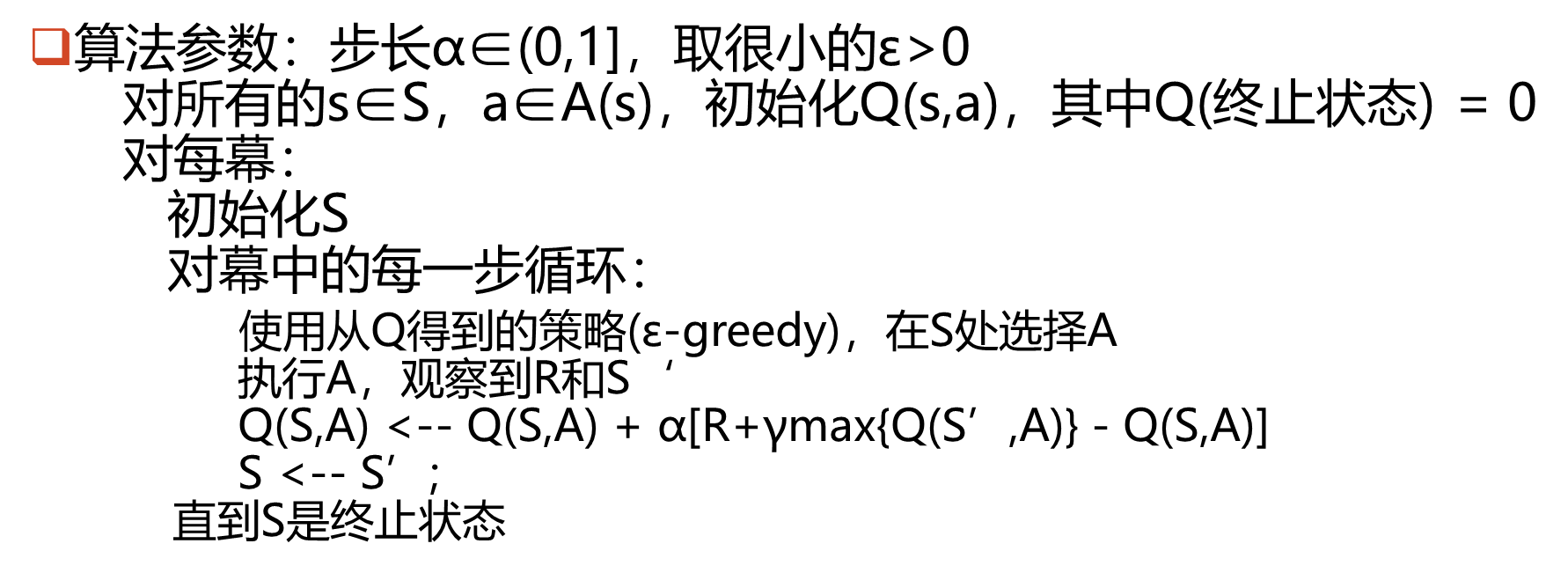
Q-Learning算法
 首先要介绍的是什么是ε-greedy,即ε-贪心算法,一般取定ε为一个较小的0-1之间的值(比如0.2)
首先要介绍的是什么是ε-greedy,即ε-贪心算法,一般取定ε为一个较小的0-1之间的值(比如0.2)
在算法进行的时候,用计算机产生一个伪随机数,当随机数小于ε时采取任意等概率选择的原则,大于ε时则取最优的动作。
在介绍完两个算法和ε-贪心算法之后,一言概之就是,Sarsa对于当前状态s的a的选择是ε-贪心的,对于s’的a‘的选择也是ε-贪心的Q-Learning与sarsa一样,只是对于s’的a‘的选择是直接取最大的。
代码分享
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches # 图形类np.random.seed(2022)class Agent():terminal_state = np.arange(36, 48) # 终止状态def __init__(self, board_rows, board_cols, actions_num, epsilon=0.2, gamma=0.9, alpha=0.1):self.board_rows = board_rowsself.board_cols = board_colsself.states_num = board_rows * board_colsself.actions_num = actions_numself.epsilon = epsilonself.gamma = gammaself.alpha = alphaself.board = self.create_board()self.rewards = self.create_rewards()self.qtable = self.create_qtable()def create_board(self): # 创建面板board = np.zeros((self.board_rows, self.board_cols))board[3][11] = 1board[3][1:11] = -1return boarddef create_rewards(self): # 创建奖励表rewards = np.zeros((self.board_rows, self.board_cols))rewards[3][11] = 10rewards[3][1:11] = -100return rewardsdef create_qtable(self): # 创建Q值qtable = np.zeros((self.states_num, self.actions_num))return qtabledef change_axis_to_state(self, axis): # 将坐标转化为状态return axis[0] * self.board_cols + axis[1]def change_state_to_axis(self, state): # 将状态转化为坐标return state // self.board_cols, state % self.board_colsdef choose_action(self, state): # 选择动作并返回下一个状态if np.random.uniform(0, 1) <= self.epsilon:action = np.random.choice(self.actions_num)else:p = self.qtable[state, :]action = np.random.choice(np.where(p == p.max())[0])r, c = self.change_state_to_axis(state)new_r = rnew_c = cflag = 0#状态未改变if action == 0: # 上new_r = max(r - 1, 0)if new_r == r:flag = 1elif action == 1: # 下new_r = min(r + 1, self.board_rows - 1)if new_r == r:flag = 1elif action == 2: # 左new_c = max(c - 1, 0)if new_c == c:flag = 1elif action == 3: # 右new_c = min(c + 1, self.board_cols - 1)if new_c == c:flag = 1r = new_rc = new_cif flag:reward = -1 + self.rewards[r,c]else:reward = self.rewards[r, c]next_state = self.change_axis_to_state((r, c))return action, next_state, rewarddef learn(self, s, r, a, s_,sarsa_or_q):# s状态,a动作,r即时奖励,s_演化的下一个动作q_old = self.qtable[s, a]# row,col = self.change_state_to_axis(s_)done = Falseif s_ in self.terminal_state:q_new = rdone = Trueelse:if sarsa_or_q == 0:if np.random.uniform(0.1) <= self.epsilon:s_a = np.random.choice(self.actions_num)q_new = r + self.gamma * self.qtable[s_, s_a]else:q_new = r + self.gamma * max(self.qtable[s_, :])else:q_new = r + self.gamma * max(self.qtable[s_, :])# print(q_new)self.qtable[s, a] += self.alpha * (q_new - q_old)return donedef initilize(self):start_pos = (3, 0) # 从左下角出发self.cur_state = self.change_axis_to_state(start_pos) # 当前状态return self.cur_statedef show(self,sarsa_or_q):fig_size = (12, 8)fig, ax0 = plt.subplots(1, 1, figsize=fig_size)a_shift = [(0, 0.3), (0, -.4),(-.3, 0),(0.4, 0)]ax0.axis('off') # 把横坐标关闭# 画网格线for i in range(self.board_cols + 1): # 按列画线if i == 0 or i == self.board_cols:ax0.plot([i, i], [0, self.board_rows], color='black')else:ax0.plot([i, i], [0, self.board_rows], alpha=0.7,color='grey', linestyle='dashed')for i in range(self.board_rows + 1): # 按行画线if i == 0 or i == self.board_rows:ax0.plot([0, self.board_cols], [i, i], color='black')else:ax0.plot([0, self.board_cols], [i, i], alpha=0.7,color='grey', linestyle='dashed')for i in range(self.board_rows):for j in range(self.board_cols):y = (self.board_rows - 1 - i)x = jif self.board[i, j] == -1:rect = patches.Rectangle((x, y), 1, 1, edgecolor='none', facecolor='black', alpha=0.6)ax0.add_patch(rect)elif self.board[i, j] == 1:rect = patches.Rectangle((x, y), 1, 1, edgecolor='none', facecolor='red', alpha=0.6)ax0.add_patch(rect)ax0.text(x + 0.4, y + 0.5, "r = +10")else:# qtables = self.change_axis_to_state((i, j))qs = agent.qtable[s, :]for a in range(len(qs)):dx, dy = a_shift[a]c = 'k'q = qs[a]if q > 0:c = 'r'elif q < 0:c = 'g'ax0.text(x + dx + 0.3, y + dy + 0.5,"{:.1f}".format(qs[a]), c=c)if sarsa_or_q == 0:ax0.set_title("Sarsa")else:ax0.set_title("Q-learning")if sarsa_or_q == 0:plt.savefig("Sarsa")else:plt.savefig("Q-Learning")plt.show(block=False)plt.pause(5)plt.close()
加上下面这一段,就可以使程序跑起来啦!
agent = Agent(4, 12, 4)
maxgen = 20000
gen = 1
sarsa_or_q = 0
while gen < maxgen:current_state = agent.initilize()while True:action, next_state, reward = agent.choose_action(current_state)done = agent.learn(current_state, reward, action, next_state,sarsa_or_q)current_state = next_stateif done:breakgen += 1agent.show(sarsa_or_q)
print(agent.qtable)
设置sarsa_or_q分别为0和1可以查看采用不同方法计算得的结果示意图
根据Q值就可以得到最后的收敛策略
需要改进的地方
代码迭代的收敛太慢,笔者写的代码迭代了20000才收敛,这与课程中的100幕左右就收敛的结果是不一致的,算法的效率上还需要改进。值得补充的是,100幕左右收敛在迭代最大代数中并没有做到,所以在模拟仿真的时候,索性就选择了20000次,说不定提前就收敛了。
可以改进的地方:对模型进行建立,因为之前代码是无模型的,设立模型对策略进行引导会得到更好的结果,当然也有可能使问题陷入局部探索之中,这是继续深入学习需要讨论的。
与科研科研结合的地方:在研究方向上,如果要结合的话,需要学习多个个体在环境下同时学习时的处理方法
引用和写在最后
Cliff-Walking仿真的是Reinforcement Learning Course by David Silver中第五讲课中的例子
课程的地址给在这里
记录一下强化学习课程的学习暂时完结,完结撒花,哒哒!