汽车电动座椅参考方案设计
tips:TI设计方案参考分析:TI Designs:TIDA-020008
双向和单向电机驱动器的电机驱动应用(如汽车电动座椅)的驱动和控制电路。它演示了如何驱动具有小电路板尺寸、高度可靠性和完整诊断功能的刷式直流电机。该设计说明了用于增加电机驱动舒适性和便利性选项以及使用更智能的全功能器件替代基于继电器的电路的解决方案。
特性
• 用于直流电机的双向驱动器
– 有刷电机 A:高达 30A 峰值
– 有刷电机 B:高达 10A 峰值
• 用于腰托的单向驱动器
– BDC 泵电机
– 电磁阀
• 来自所有电机的多路复用电流采集
• 反向电池保护和负载突降保护
• 最小驱动电路板尺寸
应用
• 座椅位置和舒适模块
• 座椅位置和折叠模块
• 座椅舒适模块

1.系统简介
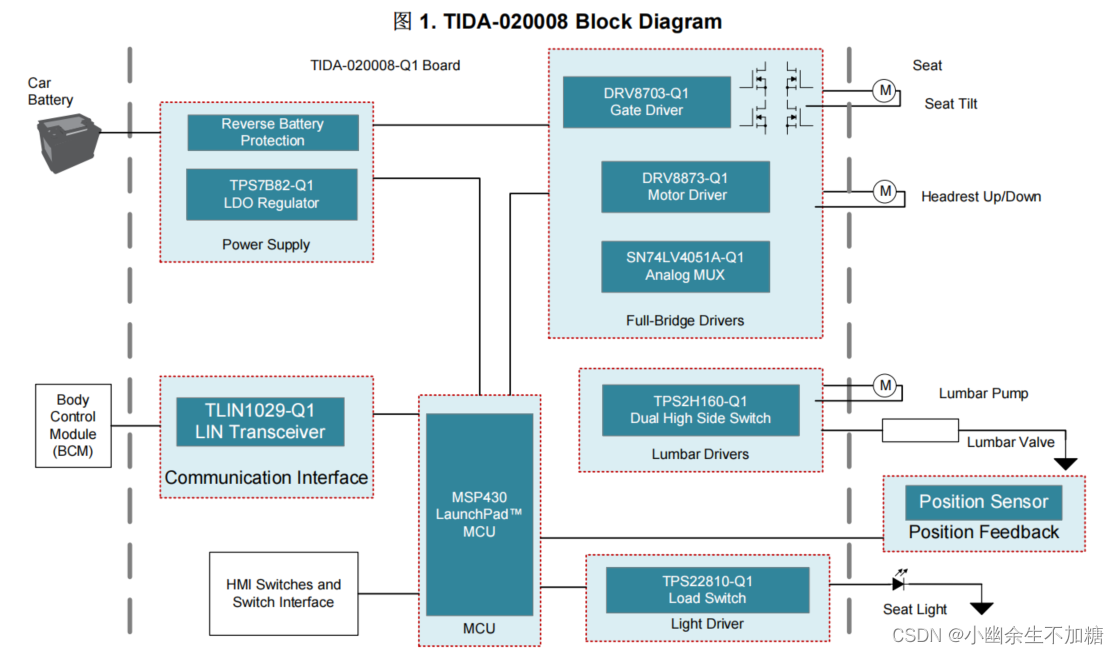
该参考方案设计实现了驱动、控制和诊断功能。三种不同的驱动器拓扑演示了如何设计具有高度可调性的各种系统需求,以匹配动力座椅(或类似应用)中广泛的汽车车身特性。
大电流(高达30A峰值)双向直流(BDC)电机驱动;
中电流(高达10A峰值)双向有刷直流电机驱动;
双单向驱动器,如电磁阀或单向泵或风扇。该方案设计还实现了动力座椅模块所需的辅助功能,如功率调节、网络通信和照明控制。
该方案设计包括一个使用全桥电路的双向电机驱动器。基于DRV8703-Q1电机驱动器,该电路包括驱动电机高达约300 W的峰值功率(在典型的汽车电池电压下为30A)所需的所有外围器件。
它还包括智能驱动器功能IDRIVE和TDRIVE,以方便调整电机操作,以提高效率和EMC性能。
诊断功能监控电机电流和MOS门极状态,以提供关键驱动条件的实时反馈。这种大电流双向驱动器是典型的应用在电动座椅电动功能上,如座椅的前后定位,上下,以及座椅倾斜。
中电流驱动器包括使用单片机和DRV8873-Q1电机驱动器所需的所有外围器件。可编程,以调整驱动阶段的关键时间和旋转速率,以提高效率和EMC性能。
诊断功能监控电机电流和驱动器的状态,以提供关键驱动条件的实时反馈,包括检测故障,如电源过电压、电池过压、电机过流、开放负载和高温故障。
该方案设计具有一个双通道智能高侧开关实现了用于单向电动应用的控制和驱动电路,如腰椎支撑充气泵和带有弹簧回路的相关电磁阀。该电路的特点包括一个可调节的电流限制,以防止短路接地负载故障,热停机,以及防止由感应负载引起的负电压峰值。
该方案设计具有一个八通道多路复用器允许选择几种不同信号中的任何一个,用单个微控制器模数转换器(ADC)进行监控,简化了单片机的需求,同时仍然提供完整的诊断能力。低功率模式允许在座椅不无效的情况下将电池的总电流降低到非常低的水平。
热保护负载开关提供了一个简单的LED驱动电路,用于打开车载LED以照亮座椅下;或者,一个非车载LED可以由同一电路驱动。一个标准的发射垫接口到车载微控制器提供共同的监控和控制信号。整个设计不受反向电池条件和负载转储条件的保护,并包括一个用于与中央车身控制模块(BCM)通信的LIN收发器。
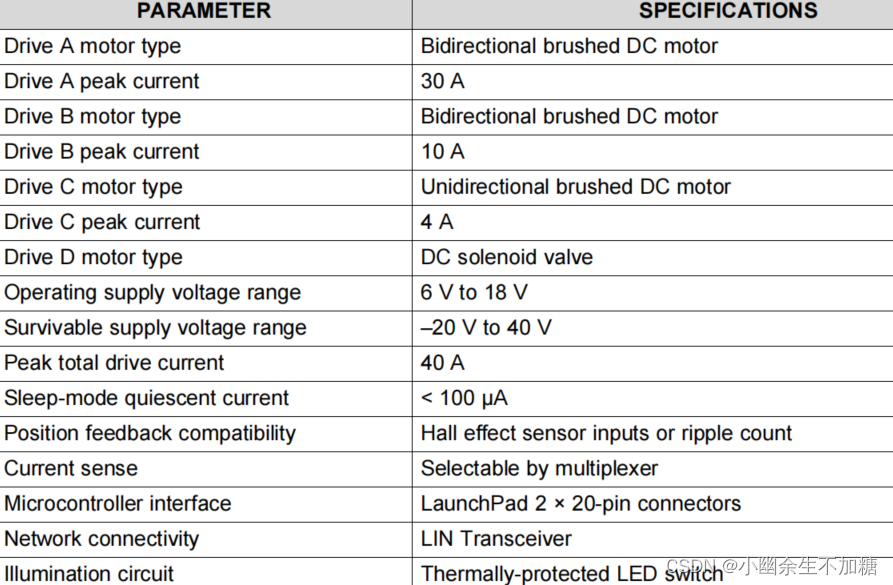
1.1系统关键参数
2.系统综述
2.1系统框图
2.2注意事项
为了简化这个参考设计,使设计更适应各单片机,该板是实现在BoosterPack模式。这种模式有一个简单的连接器接口到外部发射垫板的MCU板,这允许这种参考设计通过各种MCU选择进行评估。启动板的实现还具有代码开发和设计测试与现有的工具,如CCS或Energia,从而加快了针对任何特定操作条件的设计优化。虽然BoosterPack格式确实允许灵活地使用不同的MCU板,但该格式也会对板的大小和布局产生限制。
在这种设计的生产版本中,单片机可能会与芯片和其他组件安装在同一板上,使板的尺寸显著减少。
为了便于测试,该设计包括五个控制开关,将不会出现在生产动力座椅模块设计。这些交换机提供用户输入,而不需要外部网络或计算机。
另一个考虑因素是选择被动器件。通常,元器件是根据预期应用的性能要求来选择的。在实际情况下,可以选择具有汽车评级的零部件。对于活性部件,所选部件为符合温度等级0或温度等级1级的AEC-Q100。
电容器一般为X7R级(−55°C至+125°C)或更高,尺寸和值选择为预期运行条件的极端情况。电容器的额定电压必须大于它们所能经历的最大电压和典型工作电压的两倍,以避免直流偏置效应。所使用的输出电容的量取决于输出纹波和瞬态响应要求。
2.3核心器件
2.3.1汽车级H桥驱动器DRV8703-Q1
DRV8703-Q1是一个单H桥栅极驱动器,使用四个外部N-MOSFET,目标是驱动一个双向有刷直流电机。
一个PH/EN,独立的H桥,或PWM接口允许简单的接口到控制器电路。一个内部感测放大器提供可调的电流控制。母线允许100%的占空比调制,并可用于驱动外部反向电池开关。
独立的半桥模式允许共享半桥,以一种低成本的方式顺序控制多个直流电机。栅极驱动器包括使用固定的断开时间的PWM电流截断来调节绕组电流的电路。
DRV8703-Q1包括智能栅极驱动技术,无需使用任何外部栅极组件(电阻和齐纳二极管),同时完全保护外部功率器件。智能门驱动器架构优化了死区时间,以避免任何互通条件,提供了通过可编程的旋转率控制来减少电磁干扰(EMI)的灵活性,并防止任何网络短路条件。此外,还包括主动和被动下拉,以防止任何dv/dt使栅极误触发。
2.3.2 汽车级H桥驱动器DRV8773-Q1
DRV8873-Q1是一个集成驱动IC,用于驱动汽车应用中的有刷直流电机。两个逻辑输入H桥驱动器,它由四个N通道MOS组成,在高达10A峰值电流的情况下可以驱动双向电机。该器件单电源供电,支持从4.5 V到38 V的输入电源范围。
PH/EN或PWM接口允许与控制器电路的简单接口。或者,独立的半桥控制可以驱动两个电磁阀负载。
电流镜允许控制器监控负载电流。该镜面近似于通过高侧电流检测,并且不需要一个高功率电阻来感应电流。
2.3.3 TPS2H160-Q1双通道智能高侧开关
TPS2H160-Q1是一个具有保护功能的双通道智能高侧开关,集成160-mΩ NMOS功率模块。
全诊断和高精度的电流监测功能,智能控制负载。
外部可调电流限制通过限制涌入或过载电流来提高整个系统的可靠性。
2.3.4 TPS22810-Q1 负载开关
TPS22810-Q1是一个单通道负载开关,具有可配置的上升时间和集成的快速输出放电(QOD)。该装置具有热关闭功能,以保护设备免受高结温的影响,从而确保设备固有的安全操作区域。该装置具有一个N通道MOSFET,可以在2.7 V到18 V的输入电压范围内工作。该装置可以支持2A的最大电流。该开关由一个开关输入控制,该输入可以直接与低压控制信号接口连接。
设备的可配置上升时间大大减少了大容量电容引起的涌电流,从而减少或消除了电源下垂。当VIN电压低于阈值时,低电压锁定用于关闭设备,确保下游电路不会因低于预期的电压而损坏。可配置的QOD引脚控制设备的下降时间,以允许时序断电。
2.3.5 TLIN1029-Q1 LIN收发器
TLIN1029-Q1是一款本地互连网络(LIN)物理层收发器,具有集成的唤醒和保护功能,符合LIN 2.0、LIN 2.1、LIN 2.2、LIN 2.2A和ISO/DIS17987-4.2标准。
LIN是一种单线双向总线,通常用于低速车载网络,使用的数据速率高达20 kbps。
TLIN1029-Q1被设计为支持12V应用程序,具有更宽的工作电压和额外的母线故障保护。LIN接收器支持高达100 kbps的数据速率。TLIN1029-Q1使用限流波形驱动器将TXD输入上的LIN协议数据流转换为LIN总线信号,以减少电磁发射(EME)。接收机将数据流转换为逻辑电平信号,然后通过通漏极RXD引脚发送到微处理器。超低电流消耗是可能的使用睡眠模式,允许通过总线或本地唤醒。集成电阻,ESD和故障保护允许设计师节省其应用板空间。
2.3.7 TPS7B69-Q1线性电压调压器
TPS7B69xx-Q1设备是一个LDO的线性调节器,设计用于高达40V的VI操作。该装置在轻负载下只有15-µA(典型的)静态电流,适用于备用微控制单元系统,特别是在汽车应用中。
该设备具有集成的短路和过流保护功能。TPS7B69xx-Q1设备可在-40°C至125°C的温度范围内工作。由于这些特性,TPS7B6925-Q1、TPS7B6933-Q1和TPS7B6950-Q1设备非常适合用于各种汽车应用的电源。
2.3.8 SN74LV4051A-Q1八通道多路复用器
8通道CMOS模拟多路复用开关被设计用于2-V到5.5-V的VCC操作。
SN74LV4051A可处理模拟信号和数字信号。每个通道允许振幅高达5.5V(峰值)的信号在任何一个方向上传输。
应用包括信号门控、斩波、调制和解调制(调制解调器)和信号多路复用。
2.4 设计原理
该方案设计由几个独立运行的电路模块组成。本节将讨论每个功能电路。
2.4.1大电流电机驱动A
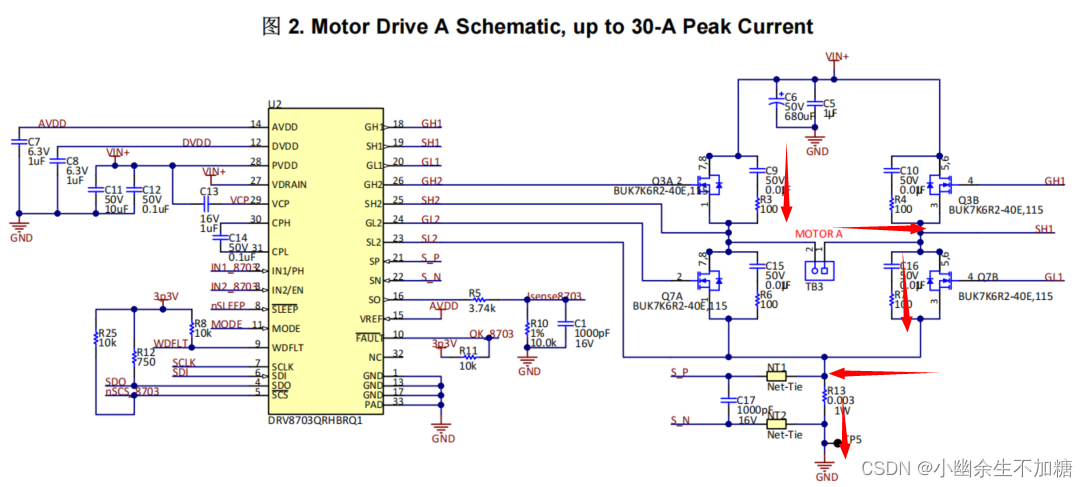
在汽车电动座椅的应用中,通常会有相对强大的电机,连续运行电流为几安培,失速电流为10 A或更多。对于这些电机,智能门驱动器和外部MOS是一个理想的设计选择。图2显示了基于DRV8703-Q1的高电流电机驱动电路的完整电气原理图。
正转:
反转:
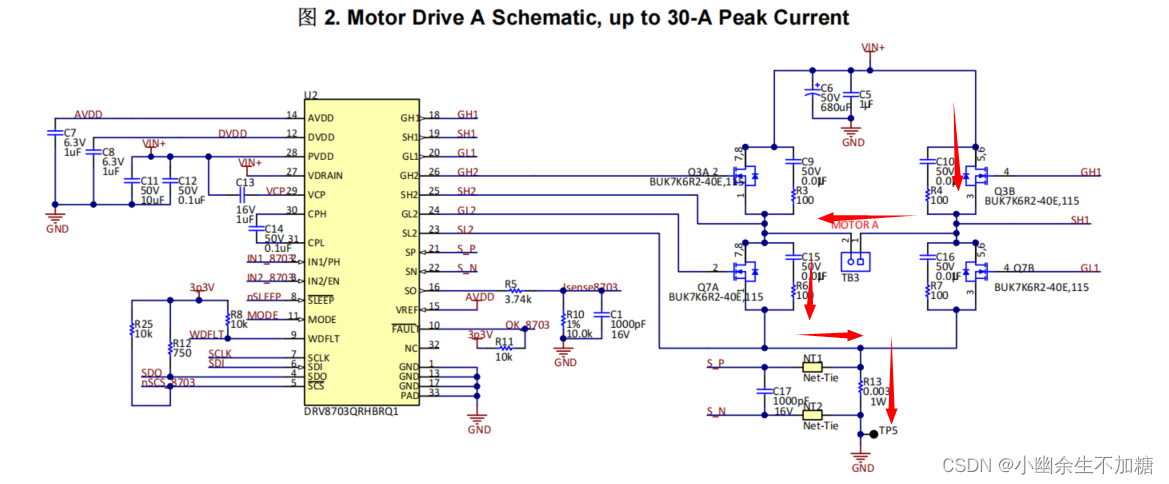
驱动级晶体管Q3和Q7是双N通道增强模式MOSFET。BUK9K6R2-40E通过漏极到源极连接额定高达40 V,以承受负载-转储故障引起的过电条件。漏极电阻通常为5.27 mΩ,最大值为6.2 mΩ。
全桥(或H桥)中的晶体管的布置是这样的,即当向电机施加驱动电压时,每个封装(Q3、Q7)中只有一个晶体管处于导通状态。
大体积电容器C6作为电机电流的局部存储器,在驱动级被激活时提供瞬态能量。由于DRV8703的调节,Q1栅极驱动电流不需要通过每个晶体管(C9、C10、C15、C16、R3、R4、R6、R7)的调节器件。这些分立器件可以用来调节优化正能驱动器的波形。
电阻R13作为电流感应电阻;只要驱动电机,通过H桥低侧的电流通过该电阻返回接地。当值为3 mΩ时,比例因子为每安培电机电流3毫伏。额定功率允许电机连续电流超过15 A。如果需要监测较高的电流,可以选择较低的电阻值。
网系带NT1和NT2用于防止原理图编辑器将低侧传感线S_N直接传送到地平面。也就是说,NT2允许定义一个新的电节点S_N,该节点与地平面相连,但它可以与S_P一起走线(差分走线),作为一个开尔文连接,用于精确感知R13上的电压。
信号S_P和S_N连接到DRV8703-Q1的SP和SN引脚。在内部,差动电流感测放大器(CSA)增加了R13的电压大小。在感测输出(SO)引脚上得到的结果信号被连接到由R5和R10形成的电阻分频器网络,其滤波器电容为C1。这些组件的值使ISense8703的比例因子约为每安培电机电流的43 mV,RC时间常数为10微秒。根据应用程序的具体要求,设计人员可能需要调整这些参数。
2.4.2 中电流电机驱动器B
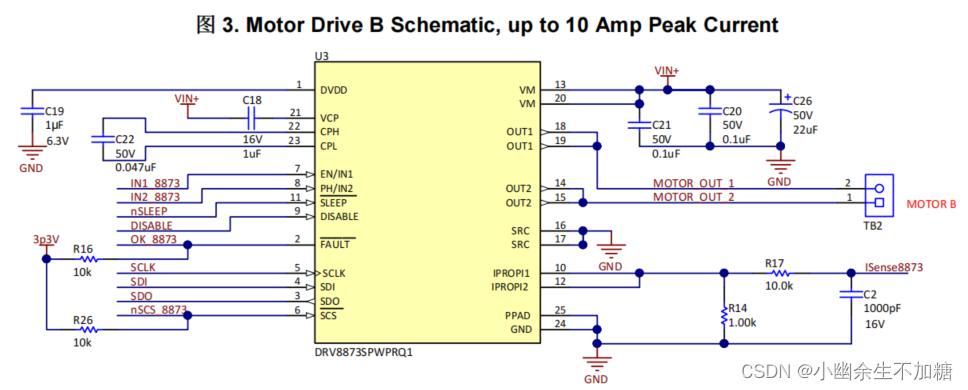
对于低电流的应用,如头枕高度或位置调整,一个集成MOS的全桥驱动器是一个很好的设计选择。图3显示了使用DRV8873-Q1的具有10A峰值电流能力的全桥驱动器的完整示意图。该设备集成了预驱动电路、最终驱动阶段、电流感,以及诊断和控制电路到一个紧凑的封装中。
2.4.3 驱动电路C和D
一些电动座椅应用程序不需要全桥(H桥)驱动级的双向驱动能力。例如,腰椎支撑功能通常使用单方向泵充气,当不充气或放气时,使用一个弹簧回位电磁阀来保持膀胱压力。泵和阀门都可以使用双智能高侧开关独立驱动,如TPS2H160-Q1,如图4所示。
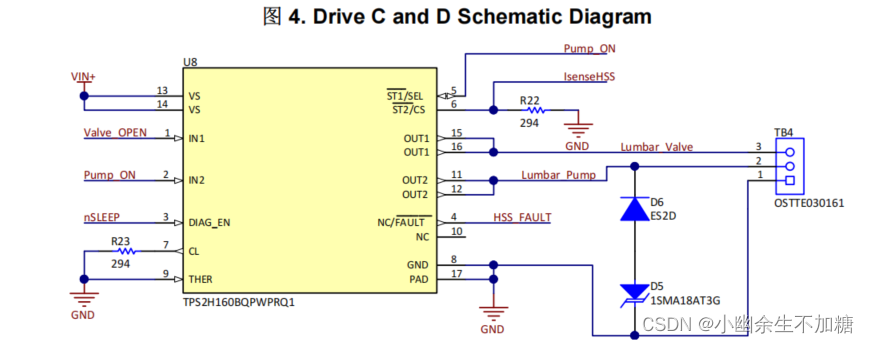
电阻R22设置当前感测输出CS的比例因子。TPS1H160-Q1的电流感比通常被指定为290 A/A。因此,R22的294 Ω值给出的电流感知比例因子约为每安培驱动电流的1V。对于用于此设计的3.3V微控制器(MSP430),这给出了3.3安培的输出电流的总范围。TPS2H160-Q1的输出电流的线性范围被指定为0到2.5 A,这提供了超出典型测试负载的预期工作电流的可观裕度。
电阻R23为TPS2H160-Q1的两个通道设置电流限制。CL引脚电流的典型比例因子比输出电流小2500倍,典型电流极限阈值为0.8 V,因此CL引脚电流为0.8 V / 294 Ω = 2.7 mA达到电流极限阈值,对应的输出电流为2500×2.7 mA = 6.8 A。
用于测试的腰椎泵和阀门的布置允许使用Pump_ON信号,根据当前感觉和电流限制,在Lumbar Pump和Lumbar Valve之间进行选择。当腰椎充气时,腰椎泵通过活动打开的腰椎瓣膜提供压缩空气,因此两个输出通道都是活动的,逻辑高Pump_ON信号选择OUT2(Lumbar_Pump)进行监测。当腰椎膀胱放气时,腰椎瓣膜打开,但腰椎泵关闭,逻辑低Pump_ON信号选择监测OUT1(Lumbar_Valve)。当膀胱保持压力,没有充气或泄气,两个输出关闭,弹簧回位电磁阀关闭。
TPS2H160-Q1规定于高达40 mJ的感应负载关闭能量。对于用于演示该电路性能的测试负载,感应关闭能量不超过此水平,因此不需要外部保护。钳位二极管D5和D6包括在电路板布局中,以容纳负载超过40 mJ的感应负载。
2.4.4 电源
图5中的电源电路包括一个线性低降(LDO)稳压器U1、反向电池保护,以及一个用于测试表明3.3v电源被激活的LED。
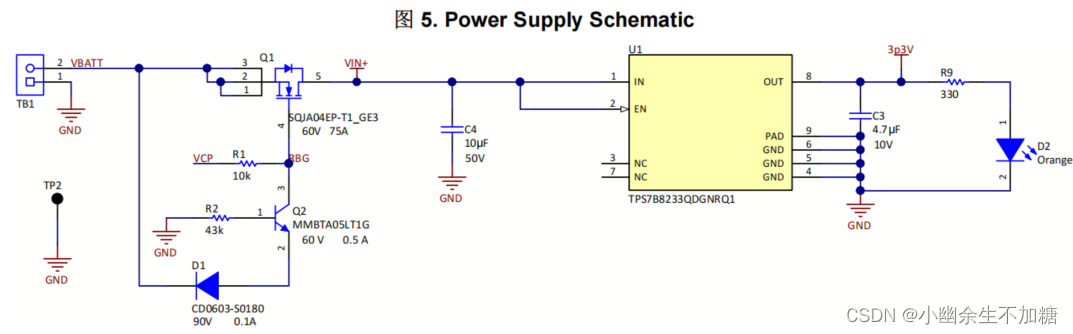
当施加的电池电压(VBATT)的极性相对于GND为正时,电流可以通过晶体管Q1的体二极管到VIN+,供应U2,DRV8703-Q1,有足够的供应供操作,见节2.4.1。如果确认nSLEEP信号(逻辑高),则U2电荷泵电压VCPF比VIN+高几伏。当VCPF被应用于Q1的栅极时,晶体管被打开,降低电压降从VBATT到VIN+,并允许设计板完全供电。如果未显示nSLEEP信号(逻辑低),则U2电荷泵不工作,Q1将不打开。因此,当不断言nSLEEP时,由于Q1的体二极管,电压从VBATT降到VIN+。这种下降不会导致任何显著的功耗问题,因为当nSLEEP是逻辑低时的电流应该非常小。在正常(正)VBATT极性时,Q2的基底在GND处,Q2是关掉的,对电路没有影响。
当施加的电池电压VBATT的极性相对于GND为负值时,Q1的本体二极管阻塞从VBATT到VIN+的任何电流。为了确保Q1是关闭的,双极NPN晶体管Q2由从GND到R2的基极电流导通。当VBATT处的电压相对于GND的负值大于两个二极管下降(Q2的VBE加上D1的正向下降)时,Q2打开并将Q1的栅极拉到一个负值。
电源将12V汽车电池电压转换为微控制器和其他部件所需的3.3V电源。电源电路的要求是产生稳定的至少35 mA的3.3V电源,同时克服反向电池和负载倾倒等电气条件。TPS7B8233-Q1提供了一个固定的3.3-V电源的调节,并具有广泛的生存输入电压范围高达45 V。TPS7B8233-Q1设备与陶瓷电容器输出是稳定的,这是汽车应用的首选。
根据TPS7B82-Q1高压超低Iq低滴调节器的引导,输入电容C4具有电容值10µF。C4的额定电压为50 V,以允许过电压条件,如负载倾倒而不损坏电容器。根据TPS7B82-Q1数据表中的指导,输出电容器C3的电容值为4.7µF。发光二极管(LED)D2是表示3.3-V电源正在运行的可视指示器。
2.4.5 模拟多路复用电路
图6显示了模拟多路复用器电路。该电路允许单个微控制器ADC通道监测整个动力座椅驱动器的几个电流和电压反馈信号。SN74LV4051A-Q1有8个可选择的输入通道,它们可多路复用到一个输出通道。在所有条件下,这些通道的开关电阻均小于600 Ω,通道间的匹配均优于40 Ω。这些低电阻值允许与由R24和C27形成的RC低通滤波器的性能一致,而没有由于开关电阻而引起的显著变化。
R24和C27的值给出了一个10毫秒的RC时间常数;设计者应该考虑为他们特定的反馈控制和诊断要求而感兴趣的频率。
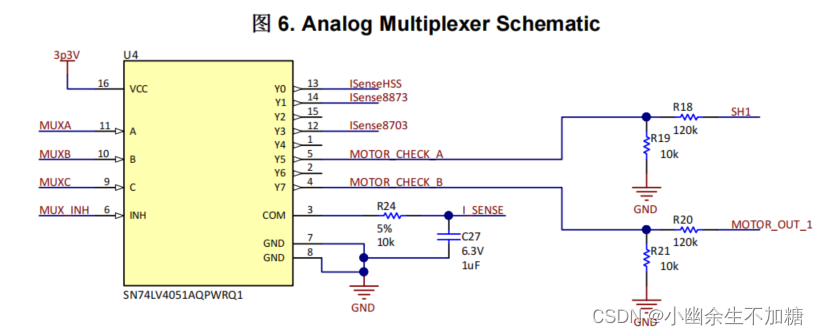
在这个设计中,只使用了8个通道中的5个;在全电动座椅设计中,附加通道将用于监测与附加电机驱动器相关的信号。通过设置MUXA、MUXB和MUXC信号,单片机的ADC模块进行监控:
ISenseHSS -来自双通道智能高端开关的当前感应信号。在这个设计中,当腰椎泵充气的腰椎支撑时,ISenseHSS是腰椎泵电机电流的一个比例。当腰椎支撑被放气时,ISenseHSS是腰椎瓣膜电磁阀电流的一个比例。;
ISense8873 -来自DRV8873-Q1的当前感应信号,在我们的测试中被用于驱动头枕高度调节电机;
Isense8703 -来自DRV8703-Q1的当前感应信号,在我们的测试中,它驱动电机,调整动力座椅高度,向前和后退位置,或座椅倾斜;
MOTOR_CHECK_A -连接到电机驱动A的大电流电机的电压。电阻R18和R19将SH1上的预期电压范围匹配到单片机ADC的3.3V范围;
MOTOR_CHECK_B -连接到电机驱动器B的中电流电机的电压。电阻R20和R21将MOTOR_OUT_1上的预期电压范围调整到单片机ADC的3.3V范围。
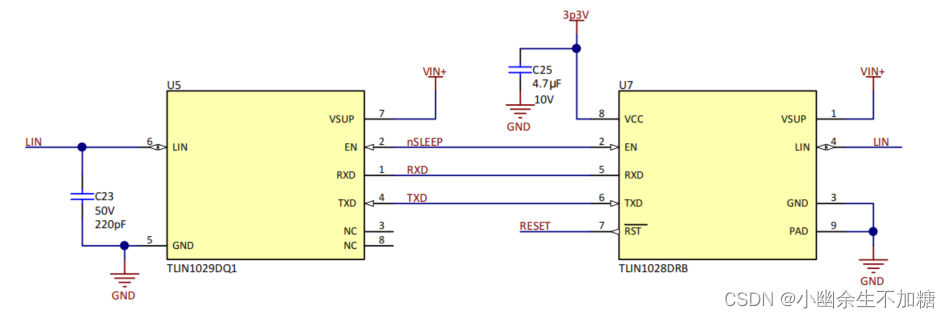
2.4.6 LIN收发器
图7显示了LIN收发器电路。TLIN1029-Q1是一个独立的LIN收发器,它将LIN物理层总线上的信号转换为逻辑级信号。动力座椅模块通常是LIN总线上的从节点;远程LIN主节点,如车身控制模块,通常包括LIN总线线上的1- kΩ上拉电阻。TLIN1029-Q1启用针(EN)连接到nSLEEP信号,当nSLEEP处于逻辑低电平时,该信号将使TIDA-020008板上的设备进入低功耗休眠模式。
2.4.7 LED输出和霍尔效应输入
图8显示了LIN通信总线的LED控制电路和接口连接器,以及允许添加霍尔效应传感器(如DRV5xxx-Q1系列)用于位置反馈的输入信号。
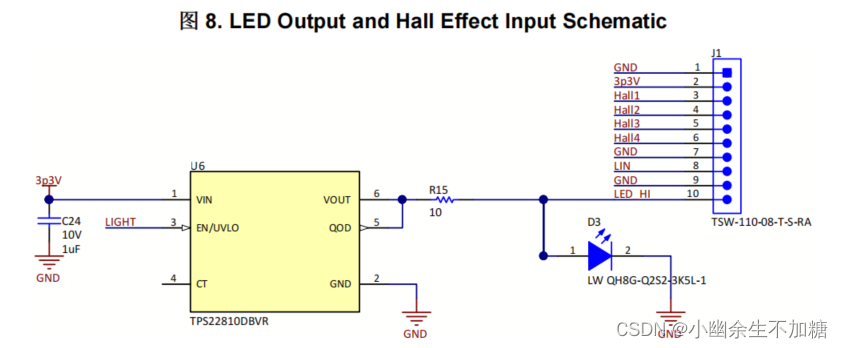
LED D3被选择为具有相对较低的接通电压,允许限流电阻R15与LED串联使用。
四个霍尔效应输入提供的信号可以由微控制器作为每个轴的运动控制回路的一部分。
2.4.8 单片机接口
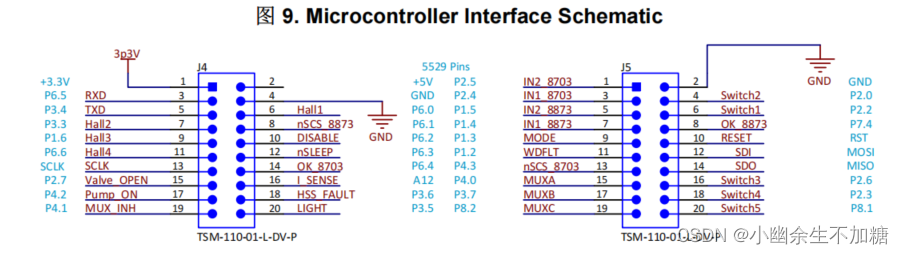
如果设计师想要用不同的微控制器来评估这种设计,那么可以使用相同的输入、输出和电源连接,请记住,TIDA-020008板是为3.3-V微控制器设计的。如果需要的话,模拟-数字缩放和通用I/O(GPIO)信号可以被修改为与5v微控制器一起工作。
2.4.9 测试开关
图10显示了在电路板设计中包含的按钮开关,以方便测试。按下每个开关将在相应的开关信号上创建一个到地的信号路径。当不按下时,开关显示对应的开关信号开路。在微控制器上的GPIO引脚上分配了每个开关信号输入。
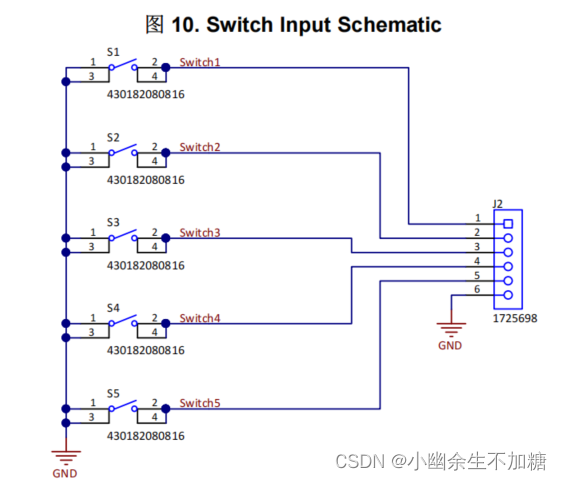
在生产座椅模块中,控制座椅功能的开关很可能位于单独的面板上,或在显示屏上实现为可编程开关。
2.4.10 静态电流
对于汽车车身电子应用,静态电流是非常重要的,因为控制座椅调整等功能的模块在很大比例的时间内是空闲的。低电流消耗是必要的,这样汽车电池不会在长时间闲置。
表2显示了在本设计中使用的设备的规格。每个设备都有一个低功率模式,具有非常低的静态电流。
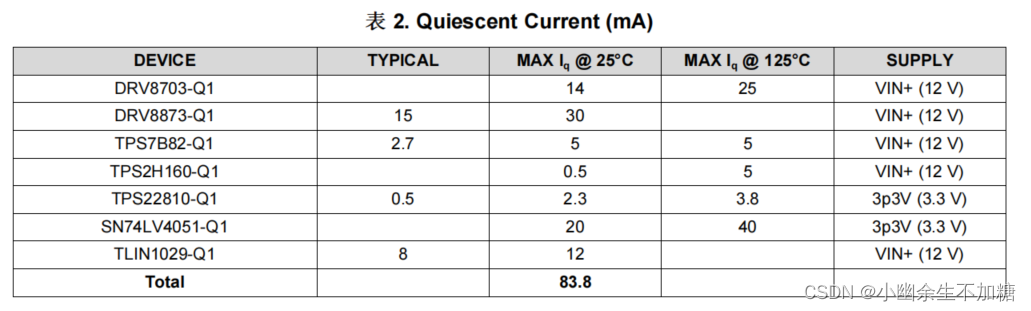
VIN+电源来自VBATT输入,来自12V标称汽车电池系统。VIN+是VBATT电源通过Q1反向电池保护FET后的电气节点,如图5所示。
虽然其中两个设备由TPS7B82-Q1线性电压调节器提供,但该电流仍然是由VBATT提供的电流产生的。如果通过去除电阻R9来禁用LED,则该方案设计的电路板总静态电流小于100µA。
测试文件以及原理图PCB文件已经上传。
https://download.csdn.net/download/qq_41600018/87361159