阿木推出的Prometheus项目校园赞助活动,再次迎来开发者参与!
北京理工大学自动化学院赵欣悦同学,在Prometheus开源仿真架构的基础上进行了二次开发,且使用P450进行了真机实验并发表了相关论文,其论文《视野约束下多机器人系统的最小持久图生成与编队控制》收录于中科院SCI期刊分区4区,根据活动规则,将获得阿木实验室赞助的奖学金2000元~
现将相关论文内容分享给大家,鼓励更多的开发者加入到我们校园赞助活动中来,只要你是参与开源项目或在相关技术领域获得荣誉成果的P系列无人机用户,参与活动就有机会获得阿木的奖学金!
主题:视野约束下多机器人系统的最小持久图生成与编队控制

DOI:10.3390/electronics12020317
Author:Xinyue Zhao,Qingkai Yang, Qi Liu, Yuhan Yin, Yue Wei, Hao Fang
Author Affiliation:School of Automation, Beijing Institute of Technology, Beijing 100081, China ; Pengcheng Laboratory, Shenzhen 518055, China
*: Corresponding author:Qingkai Yang
期刊:中科院SCI期刊分区4区 – Electronics
作者:赵欣悦,杨庆凯,刘奇,殷煜涵,尉越,方浩
作者单位:北京理工大学;鹏城实验室
通讯作者:杨庆凯
内容概述:
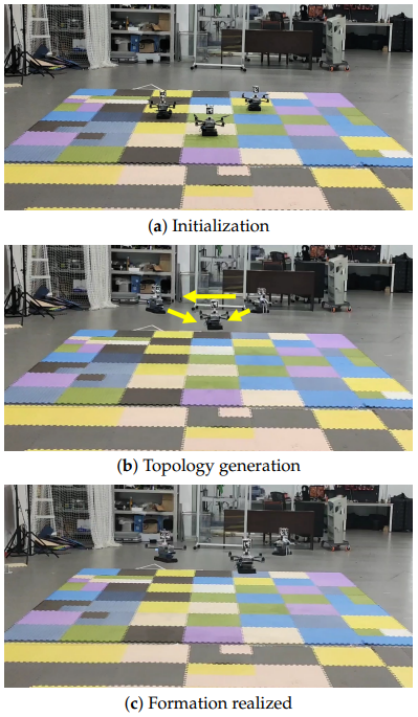
多无人机编队控制已广泛应用于协同侦查、区域探索及协同搬运等实际场景。无人机之间稳定的通信一直作为编队控制的理想条件,而在实际场景中,并不总能够保证通信的畅通。在不使用通信的情况下,基于视觉感知的协同编队控制方法得到了广泛的研究。然而,传感器先天存在的限制(如:有限的感知距离和视野角等)为编队控制带来了巨大的挑战。本文针对感知约束下多机器人系统编队控制问题,提出了一类最小持久图生成与编队控制方法。具体来讲,每个机器人存在有限的视野角与感知范围。为了解决这个问题,需要为多机器人系统设计合适的交互拓扑,即为每个机器人分配邻居,使得机器人的感知约束能够满足。此外,为了使视野约束严格满足,还要求指定的邻居在形成编队的过程中始终保持在其视野范围内。
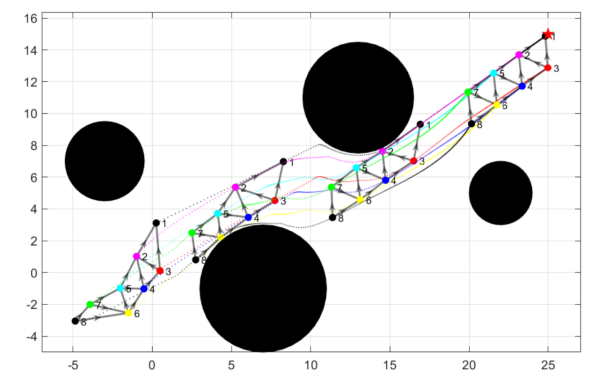
为此,本文首先提出了一种基于深度优先搜索的最小持久图生成算法,给定多机器人系统一组可行的初始位置,该算法能够生成满足传感器约束的最小持久图。该最小持久图作为感知拓扑,为多机器人系统提供感知交互关系,其有向边表征了系统的感知约束。基于生成的最小持久图,利用基于梯度的编队控制方法与控制障碍函数(CBF),我们提出了一类分布式编队控制方法,综合考虑各种约束与编队控制目标,构造能够实时在线求解的二次规划问题。该算法不仅能够将邻居机器人限制在感知区域内,保证感知拓扑的连通,还能够避免机器人与机器人、机器人与障碍物发生碰撞,最终实现了多机器人系统在无需通信条件下的编队协同控制。
引用Prometheus说明:
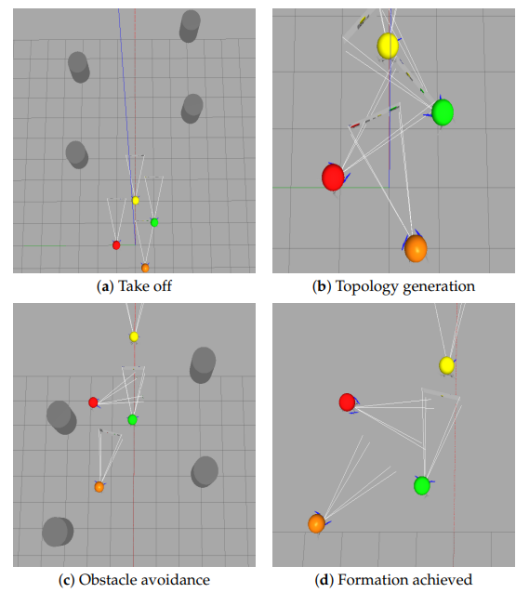
为了验证本文提出算法的有效性,本文在阿木实验室开发的Prometheus开源仿真架构的基础上进行了二次开发,通过将自己设计的视觉感知算法与编队控制算法整合到Prometheus框架中,进行了仿真和实机实验,仿真与实验结果证明了提出算法的有效性。文中引用为“The software implementation is in Prometheus (an open source software for autonomous drones [39])”。

如需了解更多论文介绍,可以点击链接:https://doi.org/10.3390/electronics12020317
- END-
Prometheus校园赞助计划
Prometheus校园赞助计划主要对象为参与开源项目或在相关技术领域获得荣誉成果的P系列无人机用户。活动分为三个部分,分别是技术文章创作、Demo PK和论文奖学金,根据活动规则可分别获得一、二、三等奖的奖励,奖金最高可达10000元,欢迎大家踊跃咨询。
Prometheus校园赞助计划全面开启
阿木实验室面向所有在校学生发起Prometheus校园赞助活动!只要你是参与开源项目或在相关技术领域获得荣誉成果的P系列无人机用户,参与活动就有机会获得阿木的奖学金,名额有限快来参与~

![[论文阅读] Explicit Visual Prompting for Low-Level Structure Segmentations](https://img-blog.csdnimg.cn/d3d437eb34974ad9b728734b20453303.png#pic_center)