水下航行器设计部分
根据博主设计制作水下航行器以及整理文档的经验,反观过来从一开始设计整个水下航行器的时候就应该从以下几个步骤考虑。(都是根据博主知识体系及经验,如有误者联系交流)
- 首先要对设计水下航行器的用途有明确的定位,是属于观赏娱乐型的还是观测科研类的,是水下作业型的还是军事侦察类的,具体的用途几乎决定了水下航行器的所有参数特性,因为每一个用途都有最适合其工作的水下航行器类型。
- 到了具体设计部分,首先你要设计一款水下航行器,你要确定其工作的能量来自哪?是来自外部线缆供电,还是来自自身的电池。电池供能得水下航行器中,电源是最大得问题,通常使用新型电池,或者采用能量消耗极小得滑翔设计。
- 根据设计水下航行器的用途,要确定要搭载哪些工作的观测仪器,(现在有种水下航行器采用组合式设计----只做一个基础水下航行器平台,预留很多接口,根据实际用途搭载特定的观测仪器),自身基础的传感器一般是温深传感器、照明灯、摄像头、(惯导,AUV上多用),根据实际用途可能包括侧扫声纳,机械手等等。
- 接着要确定设计水下航行器的整体机械结构,这部分是整个水下航行器设计过程中最大的问题,考虑问题极多,关系到整体的运功控制方式、传感器的安装位置、各个部件是否有符合的材料、是否容易加工等等问题。
- 机械结构确定之后你还要具体的细化。包括整个水下航行器设计的建模,所以你要提前把每个元件考虑好,每个元件的尺寸参数通信控制方式是不是符合设计使用的要求,把每个部分包括外部的机械结构进行建模,整体结构的仿真优化,反复修改讨论,使阻力最小化保证水下航行时的经济性。
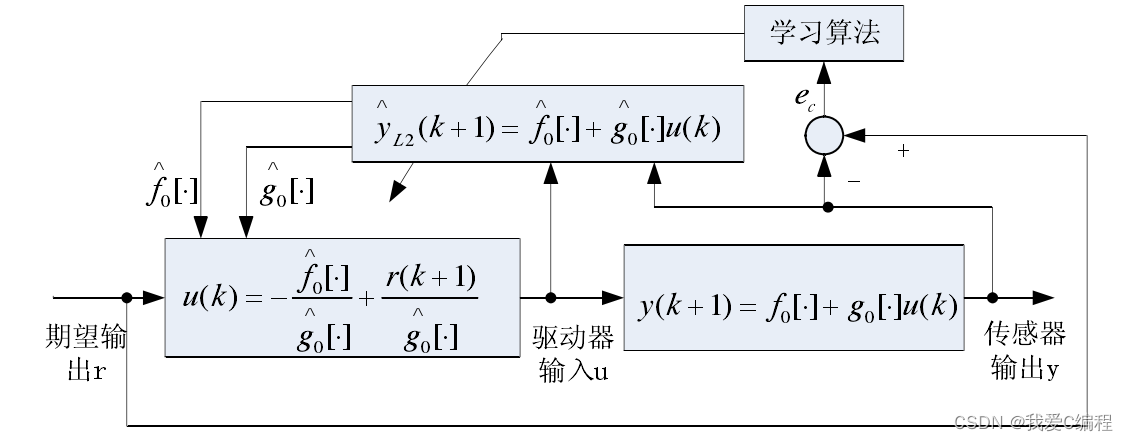
- 电气控制,包括是用什么微控制器,和搭载的观测等传感器的整体电气电路。当控制方式已经定的时候,在水中的稳定性及经济性很大程度上都取决于电气控制的算法设计了,另外这部分还包括智能控制,比如水下复杂环境的自适应观测、智能探测又或多个水下航行器的联合观测等等。这部分是目前AUV较为关键的技术。
- 人机交互,在前面的基础都已经完成的情况下,可以考虑如何设计一个良好的人机交互界面,ROV上尤为重要,因为人机交互界面会实时返回水下航行器的状态反馈给操控人,接着操控人要根据其信息操控水下航行器执行任务,并保存实时的数据,在AUV上人机交互界面主要任务下达及任务结束后中间数据的导出。
分-----------------------------------------------------------割----------------------------------------------------------------------线
这里我就根据刚交付美军的REMUS-100举例说明
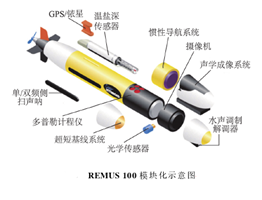
首先博主先对这款水下航行器简单的介绍及评价,这款REMUS-100是为沿海100米左右工作环境设计的小体积、轻量型无人水下航行器。号称世界上最成熟的AUV。主要用途有海底测绘、环境监测、海洋调查、科学研究等,博主也认为这是款集成度非常高的水下航行器。自主化程度高(具体没有使用过//手动滑稽)。下面就根据刚才博主的步骤说明。
PS: 这里只是根据我了解的简单的说明,会有不全面处及错误处欢迎指正。
- 首先这是针对于水下监测、调查开发的一款组合式水下航行器基础平台,不是作业式的水下航行器(作业式的水下航行器一般都带有机械手或者其他工作部件,不只是观测)。

典型的作业式ROV
-
根据实际用途,既然是监测类的,肯定不能有缆了,所以能量供应肯定是来自自身电池。这里要注意,电池的综合性能是非常重要的,要综合考虑电池的密度、能量等等因素。
-
用途是用于监测的组合式水下航行器基础平台,所以载有基础的传感器包括尾部的推进器提供向前的推力,尾部的尾翼提供转向沉浮的力矩,温盐深各类传感器,GPS、铱星导航通信组件,多普勒计程仪的导航套件(后面补充GPS在下没用为什么还要加上)。其次还有侧扫声纳等观测仪器。
-
为了最大可能的节约能量,整体机械结构采用最为成熟的鱼雷型设计,尾部螺旋桨单向推进,尾翼控制方向。整体采用铝合金加工,水下耐压100米,分段式设计,每部分之间完整连接。(肯定保证了质心,重心合适,后篇会介绍)
-
建模及仿真优化,建模不仅为后期的优化做基础,还可以给航行器做整体渲染图,优化头部的线条及尾翼,最大程度上保证在额定速度下水下航行器周围的湍流最小,航行时对水下环境影响最小。
-
控制部分这里就不展开说了,这里使用了惯导(+GPS)实现在水下精确定位,实测中速按规定路线航行20分钟误差2-3米。这部分难度是非常之大的,对传感器精度性能、控制、算法要求极高。
-
良好的人机交互界面,包括实时航行器的姿态,实时传感器数据,及设定执行任务航线。

这篇就到这了。下篇博主通过博主认为的设计制作分为几个部分。且听我一一道来。