目录
1.算法仿真效果
2.MATLAB核心程序
3.算法涉及理论知识概要
4.完整MATLAB
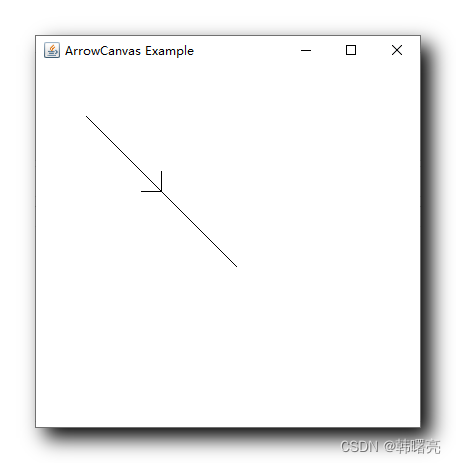
1.算法仿真效果
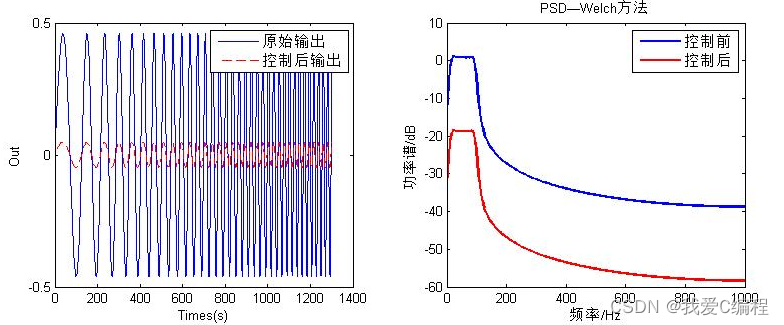
matlab2022a仿真结果如下:

2.MATLAB核心程序
..........................................................................%定义期望输出
r = Out;parameter;% while Iter < Max_iter
u_delay1 = 0;
u_delay2 = 0;
u_delay3 = 0;
u_delay4 = 0;
y_delay1 = 0;
y_delay2 = 0;
y_delay3 = 0;
y_delay4 = 0;
Err_tmp = 0;
for k=1:All_LengthData_Delays = [y_delay1;y_delay2;y_delay3;u_delay2;u_delay3;u_delay4];%学习[Y_hidden(k),Hidden1G,Hidden2G,Y_hiddenG(k),Hidden1F,Hidden2F,Y_hiddenF(k)] = func_Hiddern(Data_Delays,u_delay1,Num_Hidden,G_wight_In,G_wight_Inb,G_wight_Out,G_wight_Outb,F_wight_In,F_wight_Inb,F_wight_Out,F_wight_Outb);%根据r计算u u(k) = func_r_u_g0f0(r(k),Y_hiddenG(k),Y_hiddenF(k));%根据辨识结果,计算输出yLyL(k) = func_Hiddern2(u_delay1,Num_Hidden,G_wight_In0,G_wight_Inb0,G_wight_Out0,G_wight_Outb0,F_wight_In0,F_wight_Inb0,F_wight_Out0,F_wight_Outb0);Err_tmp(k) = yL(k) - r(k);%F和G网络 %G神经网络计算[dg_weight_in,dg_bweight_in,dg_weight_out,dg_bweight_out] = func_G_net(Err_tmp(k),Out(k),In(k),Y_hidden(k),G_wight_Out,Hidden2G,Data_Delays,Y_hiddenG(k),Hidden1G,Num_Hidden,Num_In); %F神经网络计算[df_weight_in,df_bweight_in,df_weight_out,df_bweight_out] = func_F_net(Err_tmp(k),Out(k),In(k),Y_hidden(k),F_wight_Out,Hidden2F,Data_Delays,Y_hiddenG(k),Hidden1F,Num_Hidden,Num_In);%G网络权值更新[G_wight_In,G_wight_Out,G_wight_Inb,G_wight_Outb]=func_G_W_updata(Learn_Rate,alpha,...G_wight_In1,G_wight_Out1,G_wight_Inb1,F_wight_Outb1,...dg_weight_in,dg_weight_out,dg_bweight_in,dg_bweight_out,...G_wight_Outb1,...G_wight_In2,G_wight_Out2,G_wight_Inb2,G_wight_Outb2);%F网络权值更新[F_wight_In,F_wight_Out,F_wight_Inb,F_wight_Outb]=func_F_W_updata(Learn_Rate,alpha,...G_wight_In1,F_wight_Out1,F_wight_Inb1,F_wight_Outb1,...df_weight_in,df_weight_out,df_bweight_in,df_bweight_out,...G_wight_In2,F_wight_Out2,F_wight_Inb2,F_wight_Outb2);%延迟u_delay4 = u_delay3;u_delay3 = u_delay2;u_delay2 = u_delay1;u_delay1 = In(k); y_delay4 = y_delay3;y_delay3 = y_delay2;y_delay2 = y_delay1;y_delay1 = r(k); G_wight_In2 = G_wight_In1;G_wight_In1 = F_wight_In;F_wight_Out2 = F_wight_Out1;F_wight_Out1 = F_wight_Out;F_wight_Inb2 = F_wight_Inb1;F_wight_Inb1 = F_wight_Inb;F_wight_Outb2 = F_wight_Outb1;F_wight_Outb1 = F_wight_Outb;G_wight_In2 = G_wight_In1;G_wight_In1 = G_wight_In;G_wight_Out2 = G_wight_Out1;G_wight_Out1 = G_wight_Out;G_wight_Inb2 = G_wight_Inb1;G_wight_Inb1 = G_wight_Inb;G_wight_Outb2 = G_wight_Outb1;G_wight_Outb1 = G_wight_Outb;
endfigure;
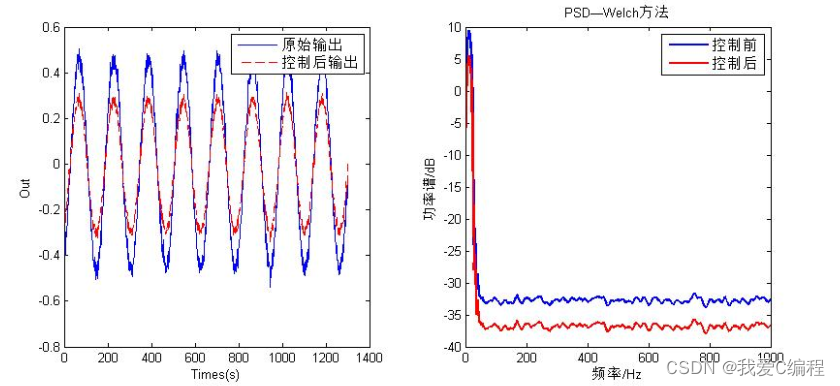
subplot(121);
plot(r(end-1300:end),'b');
xlabel('Times(s)');
ylabel('Out');
hold on;
plot(yL(end-1300:end),'r--');
xlabel('Times(s)');
ylabel('Out');
legend('原始输出','控制后输出');
.............................................................................
08_016_m3.算法涉及理论知识概要
飞机垂直尾翼的持续涡流载荷会导致垂直尾翼的疲劳损伤,影响飞行器的飞行性能和飞行 安全,因此对尾翼进行振动主动控制是非常有必要的。以某型飞行器50%的垂尾模型为研 究对象,针对垂尾结构控制系统的不确定性和非线性等复杂特性,开展了基于人工神经网络的 垂尾结构控制系统的非线性振动模型辨识和振动主动控制研究和实验。
近年来,神经网络的研究得到了越来越多的关注和重视,神经网络以其独特的结构和信息 处理方法,已在系统辨识、信号处理、自动控制与人工智能等领域得到了实际应用。本章介绍 了人工神经网络的构成原理、BP网络和BP算法、神经网络系统辨识理论以及神经网络控制理 论,为神经网络在飞机垂尾模型智能结构振动主动控制系统中的应用奠定基础。 人工神经网络(Artificial Neural Network,简写为ANN),亦称为神经网络(Neural Network, 简写为NN),是由大量简单的处理单元(称为神经元或节点)互相连接而形成的复杂网络系统, 它反映了人脑功能的许多基本特征,是一个高度复杂的非线性动力学系统。 每个神经元代表一种特定的输出函数,称为传递函数。各神经元之间相互连接形成一个网 络拓扑,不同的神经网络模型对拓扑结构与互联模式都有一定的要求和限制。在每对神经元之 间的连接上还作用一个加权系数,这个加权系数起着生物神经系统中神经元突触强度的作用, 通常称之为连接权值。在神经网络中,连接权值可以根据经验或学习而改变,修改权值的规则 称为学习算法或学习规则。一个神经网络模型描述了一个网络如何将它的输入矢量转化为输出 矢量的过程。通常,神经网络模型的神经元特性、拓扑结构和学习算法是决定神经网络功能特 性的三大要素。
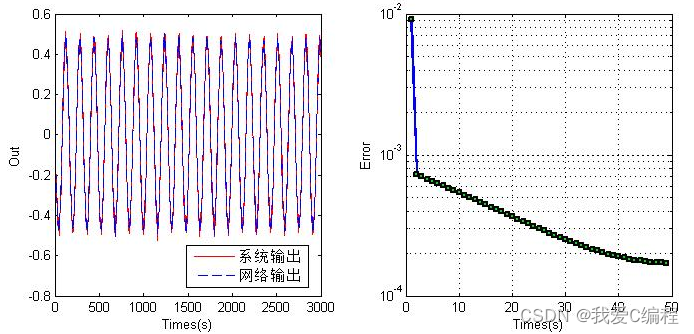
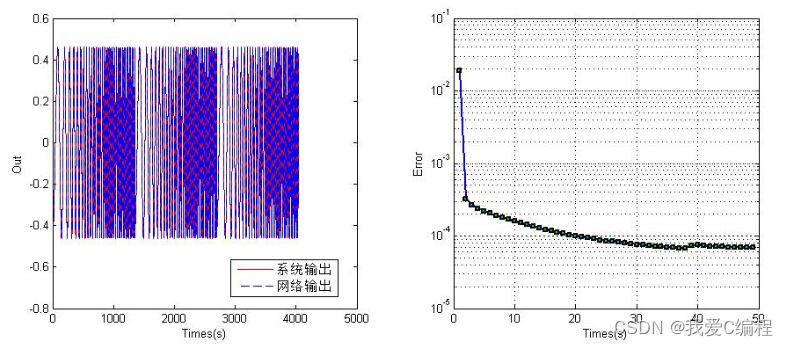
一:离线辨识
这个部分,主要是通过给定模型的输入和输出,然后通过网络进行训练,得到神经网络的辨识参数。对于网络辨识部分,其基本构架如下所示:
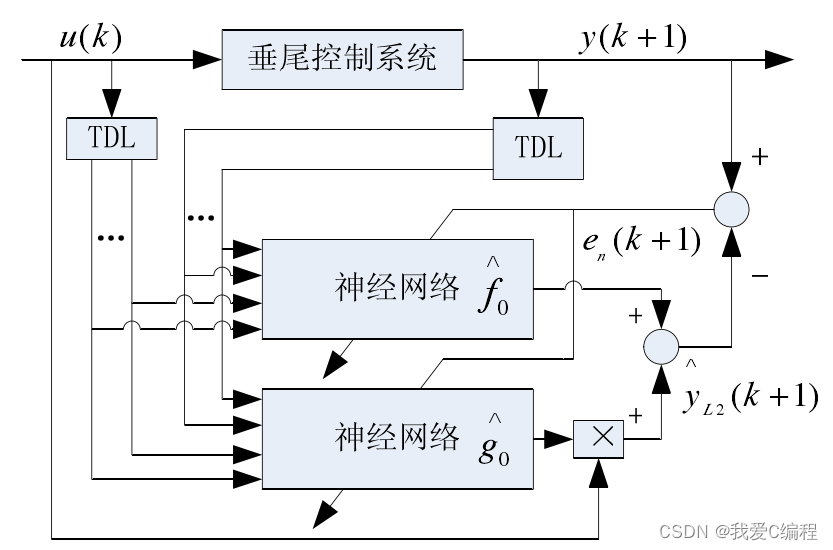
上述的辨识结构,通过控制对象的输入和输出的延迟分别进入F网络和G网络,然后通过网络输出和实际输出的误差对网络F和网络G进行在线学习。
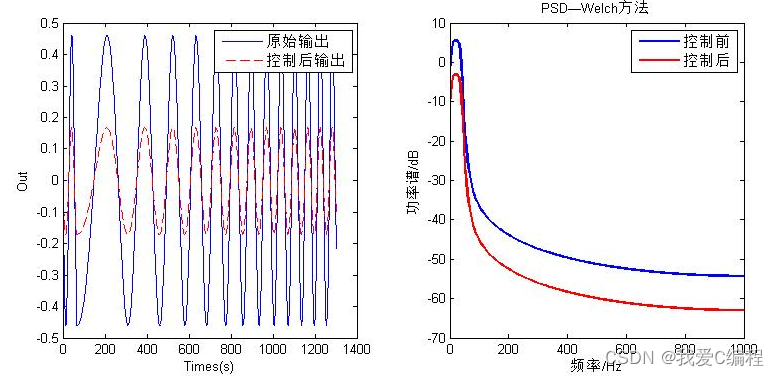
二:在线控制
这个部分主要理论为论文第四章。理论论文已经有介绍了,这里就不做叙述。其基本结构如下所示:
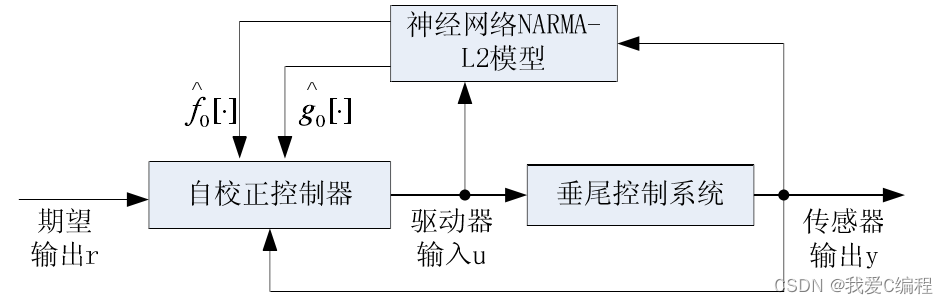
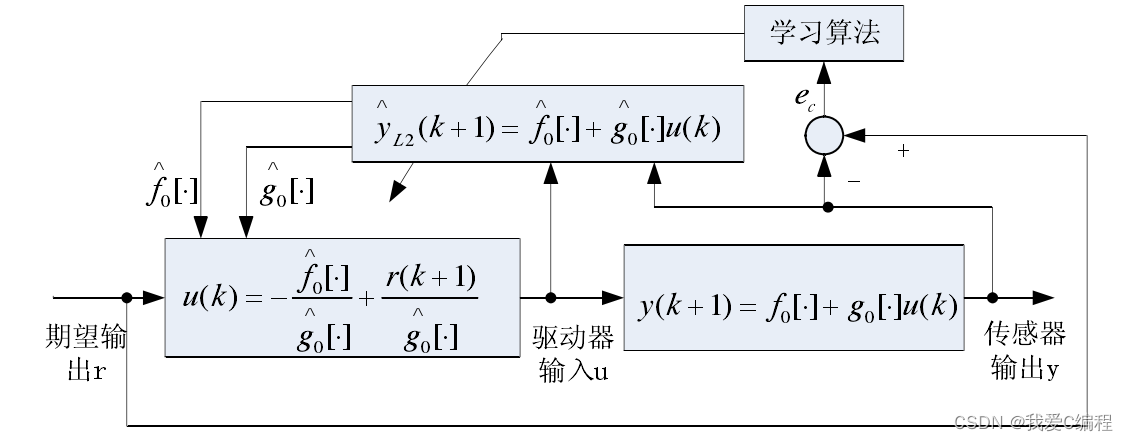
根据以上所述,设计的控制方法主要具有三大特点: 1) 计算量相对较小,适合快速实时控制系统。 2) 辨识器中的神经网络NARMA-L2模型,用离线训练方式得到, 训练方式上可以选择任意的学习批处理算法,本文采用的是Levenberg-Marquardt算法。 3) 控制系统中具有唯一的在线训练部分,即神经网络控制器的一个前馈通道,控制器对神经 网络系统模型进行重新调整。
4.完整MATLAB
V





![[MySql]表的增删查改](https://img-blog.csdnimg.cn/260f16477e8245b991584552c6d6e1c2.png)