目 录
1 概论 1
1.2 国内外研究现状 1
1.3 主要研究内容 1
2六旋翼无人飞行器的结构分析与选择 3
2.1结构形式 3
2.2工作原理 3
2.3机架及桨叶的选择 4
2.3.1 单个桨叶空气动力分析及桨叶的选择 4
2.3.2材料的选择 6
2.3.3机架结构分析与优化 6
3电机 7
3.1电机的分类与介绍 7
3.2电机参数简介与选择 7
4电调 9
4.1电调的选择 9
5电池 10
5.1电池选择 10
6飞行控制器 12
6.1飞行姿态模型分析 12
6.2飞控调试 16
6.3飞行模式配置 17
7遥控设备 18
7.1遥控器的选择 19
参考文献 21
致 谢 22
1.3 主要研究内容
主要内容是在四旋翼无人飞行器相关技术的基础上进行研究和分析,选择出最佳的配件来组装一架六旋翼无人飞行器并进行优化,将从无人飞行器的机架、飞行控制器、电机、电调、电池、遥控装置等几个主要配件进行分析优化,选出最佳的配件来组装一架六旋翼无人飞行器。从几个不同方面对四轴飞行器做的全面的研究,具体内容将通过六个章节进行描述,各章的主要内容如下:
第一章:重点介绍六旋翼无人飞行器的发展历程和国内外发展现状,分析了六旋翼无人飞行器的研究意义。
第二章:首先对六旋翼无人飞行器的机架结构进行了介绍,然后对六旋翼飞行器的原理进行了介绍以及飞行姿态的介绍,最后是根据工作的要求对六旋翼无人飞行器的机架进行分析和选择。
第三章:首先对有刷电机、无刷的种类进行介绍,然后对电机的选择进行分析,最后根据六旋翼无人飞行器的运载要求选择合适的电机。
第四章:首先对有刷电调、无刷电调的工作原理进行介绍,然后对电机的选择进行分析,最后根据六旋翼无人飞行器的电机载荷要求选择最佳的电调。
第五章:首先对各种充电电池的各种特征进行介绍,然后解析锂聚合物电池的各项参数和性能,最后根据六旋翼无人飞行器的工作要求选择最佳电池作为飞行器的工作电源。
第六章:首先对APM飞行控制器进行介绍,然后根据飞行姿态的模型表示,使地面软件对APM飞行控制器进行调试,最后解释APM飞行控制下可编辑的几种飞行模式。
第七章:首先对遥控器常用信号进行介绍,然后对遥控器的种类进行介绍分析,最后根据飞行半径的要求选出合适的遥控器。
第八章:首先对六旋翼无人飞行器的配件选择进行总结,然后对所存在的不足进行阐述,最后对六旋翼无人飞行器存在的一些不足假设出相应的弥补措施。
2六旋翼无人飞行器的结构分析与选择
2.1结构形式
六旋翼无人飞行器通常采用六个旋翼作为飞行器的动力源。六个旋翼处于同一高度平面。相邻两旋翼,一个逆时针旋转,一个顺时针旋转,六个电机对称的安装在飞行器的支架末端,且对角线上相对的两旋翼旋向相反[6]。支架中间的工作台上层安放信号接送机、GPS定位系统,中间层安放飞行控制计算器、电流电调集成板。下层安放飞行器锂电池,以及航拍所需要的云台、相机及图形传送系统[7]。六旋翼最大的优点在于升级空间广阔,不仅可以运载摄像头,还可以卸载摄像头后在工作台下层按照其他设备,例如农药喷洒器、种子播撒器等等。六旋翼无人飞行器的结构形式见图2-1。
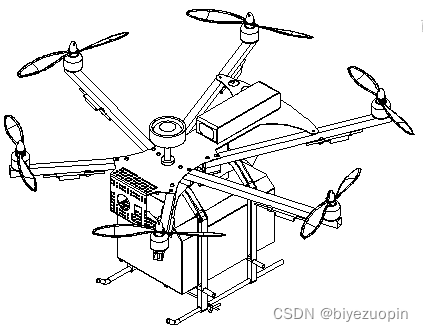
图2-1 机架图
2.2工作原理
六旋翼无人飞行器通常是由飞行控制器控制六个电机转速的变化来实现升力的变化,从而控制飞行器。一个飞行器姿态包括仰飞, 翻滚和偏航,不管是固定翼还是旋翼飞行器,都必须要实现这三种基本控制[8]。旋翼还有悬停特殊飞行姿态,因此对于六旋翼无人飞行器,它通过对六个电机旋转的速度和力矩、方向的所产生差值来满足以上飞行姿态。对于这个操作而言,六旋翼无人飞行器只有完全平衡才能满足这些要求,当六个旋翼的重量和大小完全一致,桨工作时会产生作用力和反作用力。机架要让桨旋转,桨也会给机架一个大小相等,方向相反的扭力。如果不能相互抵消这个扭力,机身就会因此而旋转。如果正桨反桨旋转转方向刚好相反,则正好抵消扭力。单旋翼的传统直升机,就需要配一个产生侧向推力的尾旋翼来抵消这个扭力[9]。所以最优化的设计就是三个正桨正向旋转,三个反桨反向旋转,这样也能降低设计工作量及复杂度。













六旋翼无人机(飞行器)设计(lunwen+任务书+开题+文综+翻译及原文+cad图纸)
news/2024/11/30 1:30:51/
相关文章

微型四旋翼飞行器设计经验之瞎扯淡
在正式开始记录微型四旋翼飞行器设计的学习笔记之前,感觉自己很有必要先给自己一个总结,也希望能够帮到更多的朋友少走弯路(虽然不知道帮助大不大)。 去年九月下旬开始了微型四旋翼飞行器的学习与设计,在12月底的时候初…

多旋翼飞行器设计与控制·绪论(笔记001)
这部分的笔记主要是按照北航全权老师的课件来的,只是进行相关的记录和总结,具体的资料在 可靠飞行控制研究组主页课程中心 ( 全部课件下载)--------------------------- 这里都可以进行下载 http://rfly.buaa.edu.cn/course 笔记的内容按照如下的步骤进行…

系统辨识专题(二)——多旋翼飞行器建模
前言 上一篇中详细阐述了MATLAB系统辨识工具箱的使用实例,本篇将以多旋翼飞行器为研究对象,详细阐述其刚体动力学模型、飞行控制刚体模型以及控制效率模型。最后,针对多旋翼飞行器控制系统设计当中的主要系统辨识问题进行解析。
多旋翼飞行器…
多旋翼飞行器设计与控制·Pixhawk4以及外部设备接线(笔记004)
笔记主要来源:Pixhawk 4 接线快速入门 目录 一、Pixhawk 4 的各个接口
二、接线图概览(重要传感器及外围设备)
三、飞控、GPS的安装和方向
四、电源
五、无线电遥控
六、数传电台(可选)
七、SD Card(…

【飞行器】基于matlab四旋翼飞行器飞行控制系统【含Matlab源码 1266期】
一、获取代码方式
获取代码方式1: 完整代码已上传我的资源:【飞行器】基于matlab四旋翼飞行器飞行控制系统【含Matlab源码 1266期】 点击上面蓝色字体,直接付费下载,即可。
获取代码方式2: 付费专栏Matlab路径规划(初级版)
备注: 点击上面蓝色字体付费专栏Matlab路径…


我发现全权又出了本《多旋翼飞行器设计与控制实践》,讲的pixhawk
我发现全权又出来本多旋翼飞行器设计与控制实践,讲的pixhawk,看来选用pixhawk是没错的,还是先不要轻易弄个人开发的一些飞控。 这本书买到手了,里面除了讲基本原理之外也讲了PX4的一些基础设置,包括固件下载࿰…
多飞行机器人吊运系统研究进展及挑战
摘要: 多飞行机器人吊运系统是指由多个旋翼飞行机器人、吊绳及单个悬挂负载共同构成的具有空中操作能力的一类新型机电系统,具有灵活性强、地域可达性好、运输便捷、载荷能力强等显著优点.多飞行机器人吊运系统应用广泛,但是其建模与控制还存在诸多挑战.旋翼飞行机器人自身是…