首页
编程日记
开发工具
嵌入式
服务器
运维
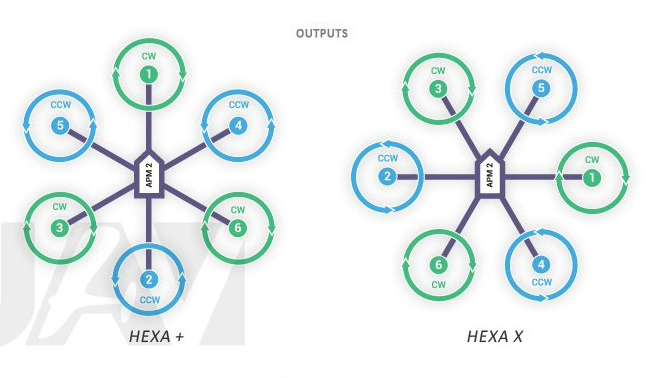
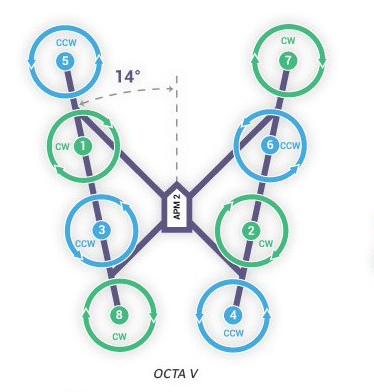
多旋翼飞行器电机转动方向大全
news
/
2024/11/30 1:48:28
/
做个笔记,方便查阅
http://www.ppmy.cn/news/895332.html
相关文章
我发现全权又出了本《多旋翼飞行器设计与控制实践》,讲的pixhawk
我发现全权又出来本多旋翼飞行器设计与控制实践,讲的pixhawk,看来选用pixhawk是没错的,还是先不要轻易弄个人开发的一些飞控。 这本书买到手了,里面除了讲基本原理之外也讲了PX4的一些基础设置,包括固件下载࿰…
阅读更多...
多飞行机器人吊运系统研究进展及挑战
摘要: 多飞行机器人吊运系统是指由多个旋翼飞行机器人、吊绳及单个悬挂负载共同构成的具有空中操作能力的一类新型机电系统,具有灵活性强、地域可达性好、运输便捷、载荷能力强等显著优点.多飞行机器人吊运系统应用广泛,但是其建模与控制还存在诸多挑战.旋翼飞行机器人自身是…
阅读更多...
多旋翼飞行器设计与控制(三)—— 机架设计
多旋翼飞行器设计与控制(三)—— 机架设计 一、布局设计 1、机身基本布局 共有三种:环型、***字型***、X字型 常用X字型: 机动性更强前视相机的视场角不容易被遮挡 环形的特点: 刚性更大避免飞行中的振动&#x…
阅读更多...
多旋翼飞行器设计之减震系统的重要性
减震系统是多旋翼飞行器设计中非常重要的环节,好的减震系统可以很好地减轻数字滤波的负担,同时能极大地提升控制系统的性能; 下面针对整个减震系统做一个简要分析;首先,IMU减震海绵配重块这样的一个系统可以等效为弹簧…
阅读更多...
多旋翼飞行器设计与控制(一)—— 绪论
多旋翼飞行器设计与控制(一)—— 绪论 前言: 最近我在学习控制技术在机器人设计上的应用。毫无疑问多旋翼无人机是验证控制模型和滤波算法最佳的实验载体。我找到了北航的可靠飞行控制研究组的课程,并打算用博客来记录自己的学习过…
阅读更多...
多旋翼飞行器设计与控制(一)
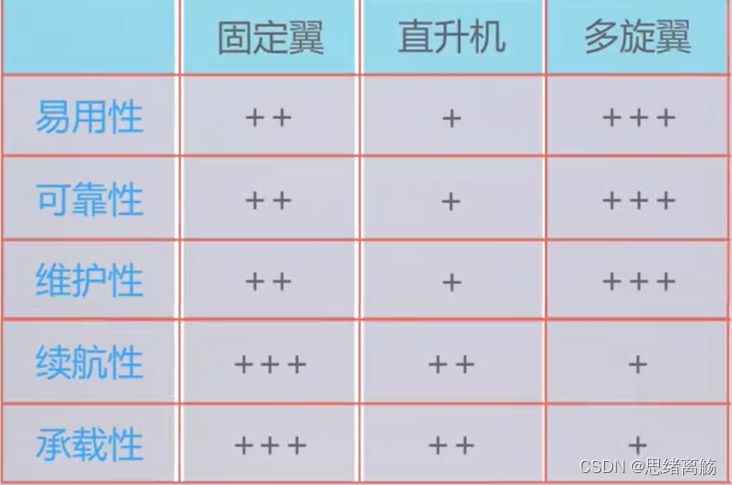
一、基本概念固定翼直升机多旋翼复合飞行器 二、操控和评价四旋翼操控对比评价局限性 三、发展历史休眠期(1990前)复苏期(1990-2005)产品方面学术方面 发展期(2005-2010)产品方面学术方面 活跃期࿰…
阅读更多...
【持续更新中...】《多旋翼飞行器设计与控制》- 北航可靠飞行控制研究组 ---- 学习笔记
《多旋翼飞行器设计与控制》- 北航可靠飞行控制研究组 ---- 学习笔记 学习内容出处绪论1.基本概念常见飞行器分类固定翼直升机多旋翼多旋翼一般受力特点:四旋翼和六旋翼分类 复合飞行器 无人驾驶飞机和航模 2.多旋翼操控和评价悬停直升机如何抵消反扭矩?…
阅读更多...
在FreeRTOS中的vTaskDelay()和vTaskDelayUntil()区别
当我们开发嵌入式系统时,经常需要在任务执行过程中添加延时。FreeRTOS提供了两个常用的任务延时函数:vTaskDelay()和vTaskDelayUntil()。它们在实现延时功能上有一些区别,本文将详细介绍这两个函数的特点和用法。 1. vTaskDelay() vTaskDela…
阅读更多...
最新文章
【GoF23种设计模式】01_建造者模式
《掩码语言模型(Masked Language Model, MLM)》
vue2面试题11|[2024-11-25]
SM3 Sm4加密算法
02.ES6(2)
数据库期末复习题库