- 一、基本概念
- 固定翼
- 直升机
- 多旋翼
- 复合飞行器
- 二、操控和评价
- 四旋翼操控
- 对比评价
- 局限性
- 三、发展历史
- 休眠期(1990前)
- 复苏期(1990-2005)
- 产品方面
- 学术方面
- 发展期(2005-2010)
- 产品方面
- 学术方面
- 活跃期(2010-2013)
- 产品方面
- 学术方面
- 爆发期(2013-现在)
- 产品方面
- 学术方面
一、基本概念
固定翼
飞机的机翼后掠角等参数固定不变。
优点:续航时间最长,飞行效率最高,载荷最大。
缺点:必须要助跑,降落时必须要滑行。
直升机
动力装置带动一个或两个主旋翼,提供托举起飞行器的升力。
优点:可以垂直起降。
缺点:续航时间没有优势,机械结构复杂,维护成本高。
多旋翼
可以认为是直升机的一种,属于四个或更多旋翼的直升机。
优点:垂直起降、机械结果简单、易于维护。
缺点:载重和续航时间都更差。
复合飞行器
二、操控和评价
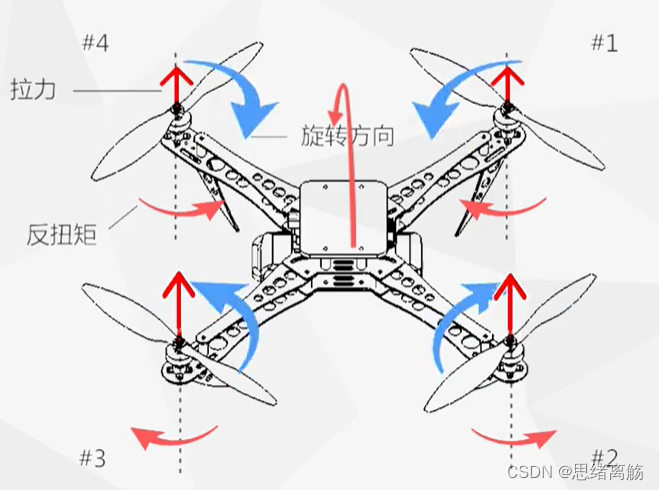
四旋翼操控
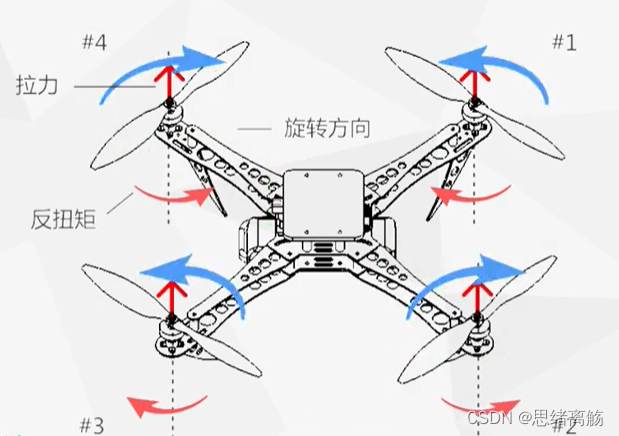
(1)悬停
- 拉力抵消重力
- 四个螺旋桨拉力产生的滚转、俯仰力矩为零
- 偏航力矩为零,四个螺旋桨反扭矩效应均被抵消
(2)前后运动
(3)左右运动

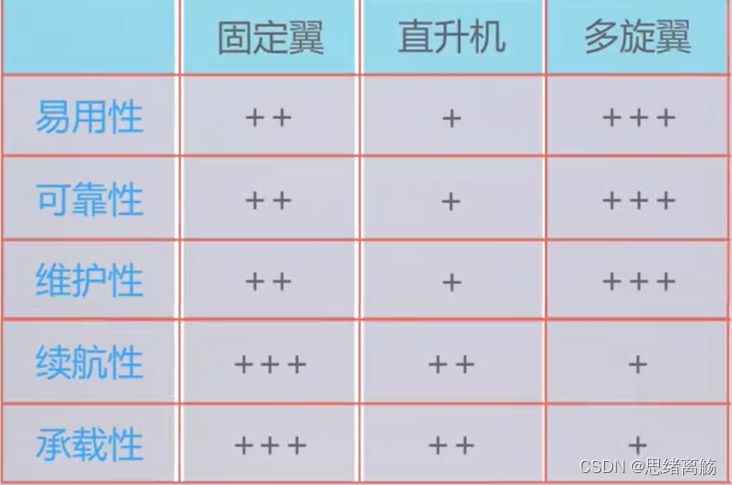
对比评价
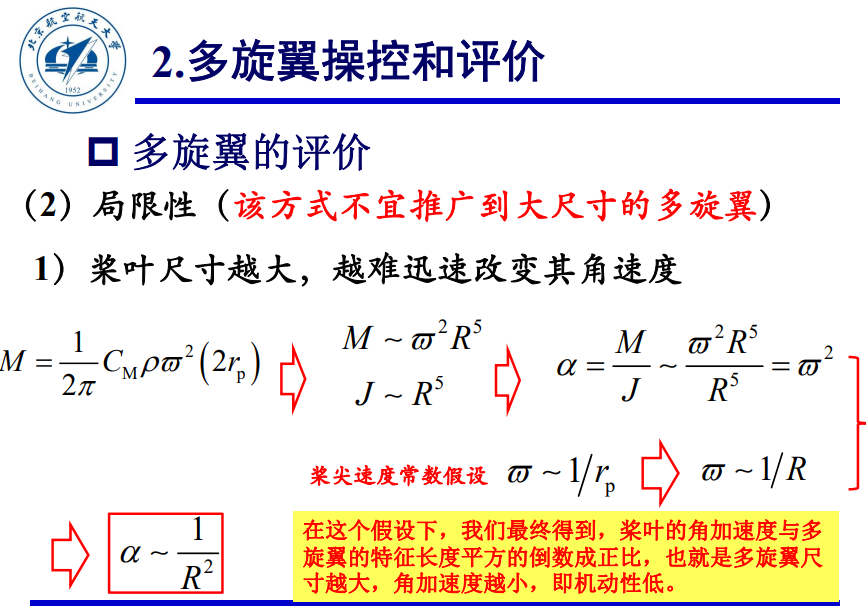
局限性
- 桨叶尺寸越大,越难迅速改变其角速度.
- 在大载重下,桨叶上下挥舞会导致刚性,大的桨叶容易折断。
三、发展历史
休眠期(1990前)
大尺寸多旋翼使用活动关节来改变拉力,进而调节姿态,相比大尺寸的旋翼直升机并没有多大的优势。
复苏期(1990-2005)
产品方面
- Gyro Saucer:最早的一款迷你的电动四旋翼。
- Roswell Flyer
- Sliver X-UFO
学术方面
- 几克重的MEMS惯导系统已经被研制出来
- 学术界开始研究建模和控制
- 2005年左右,真正稳定的多旋翼无人机自动控制器才被制作出来。
发展期(2005-2010)
产品方面
- 2006年,Microdrones公司推出第一代产品Md4-200
- 2010年,Microdrones公司推出第一代产品Md4-1000
- 2006年,德国人霍格尔-巴斯和英葛-巴斯克主导的四轴开源项目Mikrokopter
- 2004年,美国Dragonflyer公司推出四旋翼Dragonflyer X4
- 2008年,美国Dragonflyer公司推出工业级多旋翼Dragonflyer X6
- 2007年,银辉X-UFO发明者和两名德国青年人竞赛的获奖者创立德国Ascending Technologies公司
学术方面
- 越来越多的学术研究人员开始研究多旋翼,自己搭建四旋翼,验证算法,特别是姿态控制算法。
- 个别研究者基于商业四旋翼+动作捕捉系统开发验证环境。好,
活跃期(2010-2013)
产品方面
- 2010年,法国的派诺特公司与学校共同合作,推出消费级的AR.drone四旋翼玩具,技术和理念也十分先进。
- 2013年,大疆推出小精灵Phantom一体机。
学术方面
- 2012年,宾夕法尼亚大学的韦杰-库马教授在TED上做出了四旋翼飞行器发展历史上里程碑式的演讲,展示了四旋翼的灵活性以及编队协作。
- 2012年, Robotics & Automation Magazine,IEEE,Aerial Robotics and the Quadrotor的专刊。
- 多旋翼开源自驾仪增多。
爆发期(2013-现在)
产品方面
- 2013年,大疆推出小精灵Phantom一体机后持续获得关注
- 3D Robotics连续推出Iris,X8+,solo等四旋翼飞行器
- 2013年,推出Pixhawk硬件
- 2013年,亚马逊发布采用四旋翼送快递的视频
学术方面
- 多学弈的研究更偏向自主化,群体化。
- 2013年,苏黎世联邦理工学院的拉斐尔-安德烈教授在TEDGLobal的机器人实验室展示了四旋翼的惊人运动机能。
- 2015年,《自然》发表综述文章,分析和展望了小型自主无人机在民用领域的科学和技术。