


相关文章
使用亚马逊云科技Amazon VPC Lattice简化服务间的连接、安全和监控
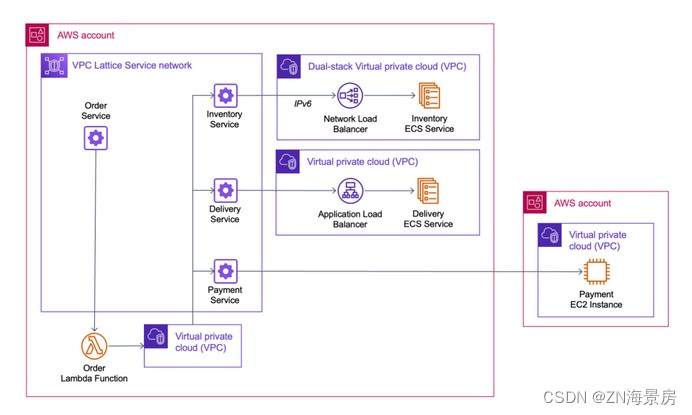
在亚马逊云科技re:Invent 2022中,亚马逊云科技介绍了Amazon VPC Lattice预览版,这是Amazon Virtual Private Cloud(Amazon VPC)的一项新功能,可通过一致的方式连接、保护和监控服务之间的通信。借助Amazon VPC Lattice…

白银实时价格应该在最适合的地方下注
小时候我们看战争片,总是发现主角们带兵打仗,战无不胜,偶尔有一场大的失利,但是总是能耐化险为夷,逢凶化吉,甚至最后成功反扑、反败为胜。后来小编一琢磨,发现,其实这些将才们打仗&a…

ESD防静电监控系统后台实时掌控现场静电防护情况
当静电积累到一定程度时,它可能会产生电击,从而对工人造成伤害。因此,工厂应该采取必要的预防措施,如提供防静电鞋和衣服,以保护工人免受静电伤害。 ESD防静电监控系统实现工业4.0技术要求,ESD物联技术稳定…

Talk预告 | ICML‘23 Oral 字节跳动 AI Lab 研究员郑在翔:人工智能如何助力蛋白质设计?
本期为TechBeat人工智能社区第500期线上Talk!
北京时间5月25日(周四)20:00,字节跳动 AI Lab 研究员 — 郑在翔的Talk将准时在TechBeat人工智能社区开播!
他与大家分享的主题是: “人工智能如何助力蛋白质设计 ”,届时将介绍基于…

发力电商培训 淘宝天下小二助力品牌商家成长
过去一年,平台各种玩法层出不穷,使得不少商家大呼有心无力,感觉什么都要学,但又不知从哪里入手为好……为帮助更多商家在2023年找对方向,突破店铺运营瓶颈,淘宝天下基于多年行业深耕经验,用可复…

人工智能学习07--pytorch18--目标检测:Faster RCNN源码解析(pytorch)
参考博客: https://blog.csdn.net/weixin_46676835/article/details/130175898
VOC2012 1、代码的使用
查看pytorch中的faster-rcnn源码: 在pytorch中导入:
import torchvision.models.detection.faster_rcnn即可找到faster rcnn所实现的源…
【leetcode】!longest substring without repeating chars
参考资料:《剑指offer》,《程序员代码面试指南》
思路: 对每一个位置str[i]来说,找它的以str[i]为end、最长、无重复字符的子串 的过程 相当于 尽可能以str[i]为end, 向左扩, 直至扩到 以str[i-1]为end、最…

JWT(Json Web Token)的原理、渗透与防御
(关于JWT kid安全部分后期整理完毕再进行更新~2023.05.16)
JWT的原理、渗透与防御 目录 JWT的原理、渗透与防御含义原理JWT的起源传统session认证问题token与session区别JWT的结构与内容 JWT的攻击和渗透敏感信息泄露空密钥破解密钥爆破CVE-2019-7644 J…