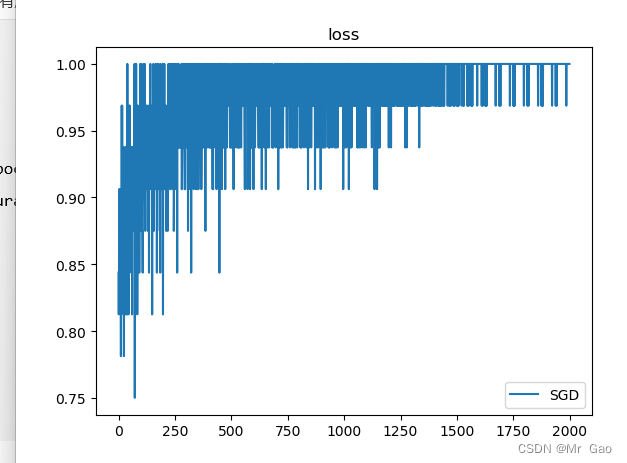
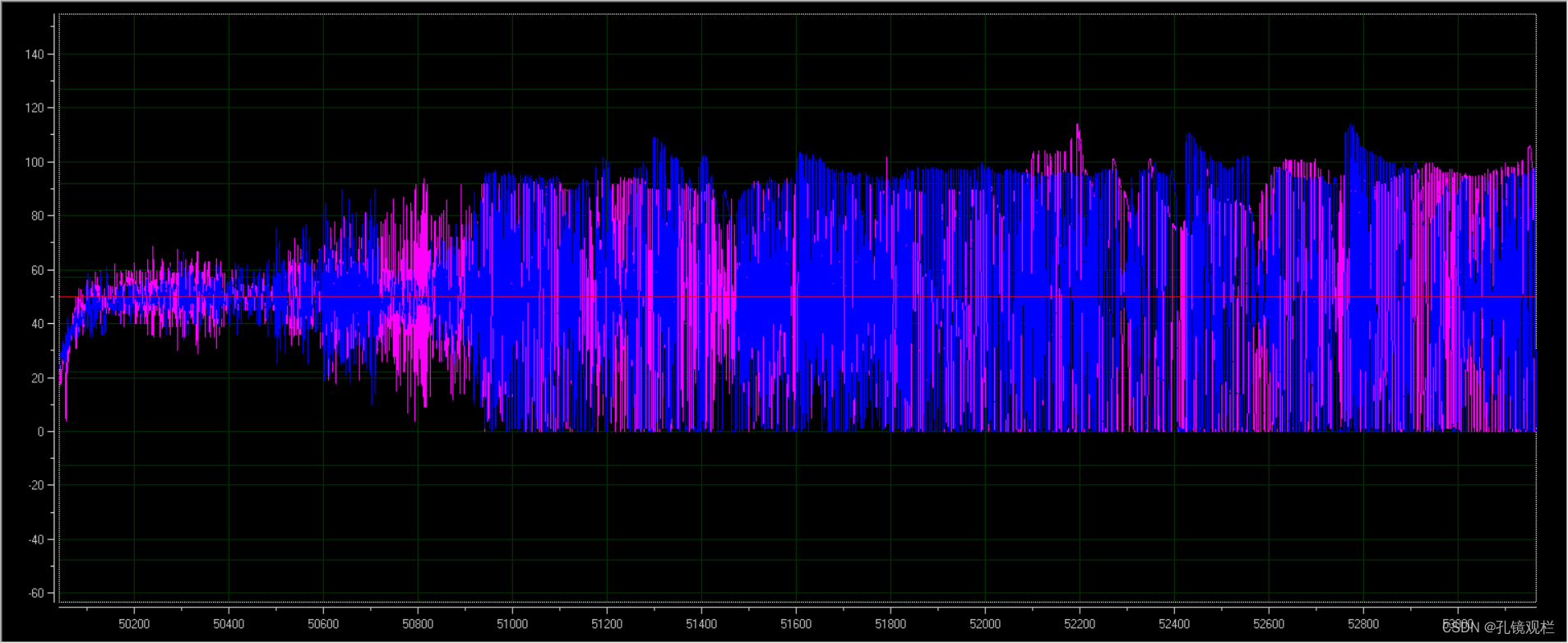
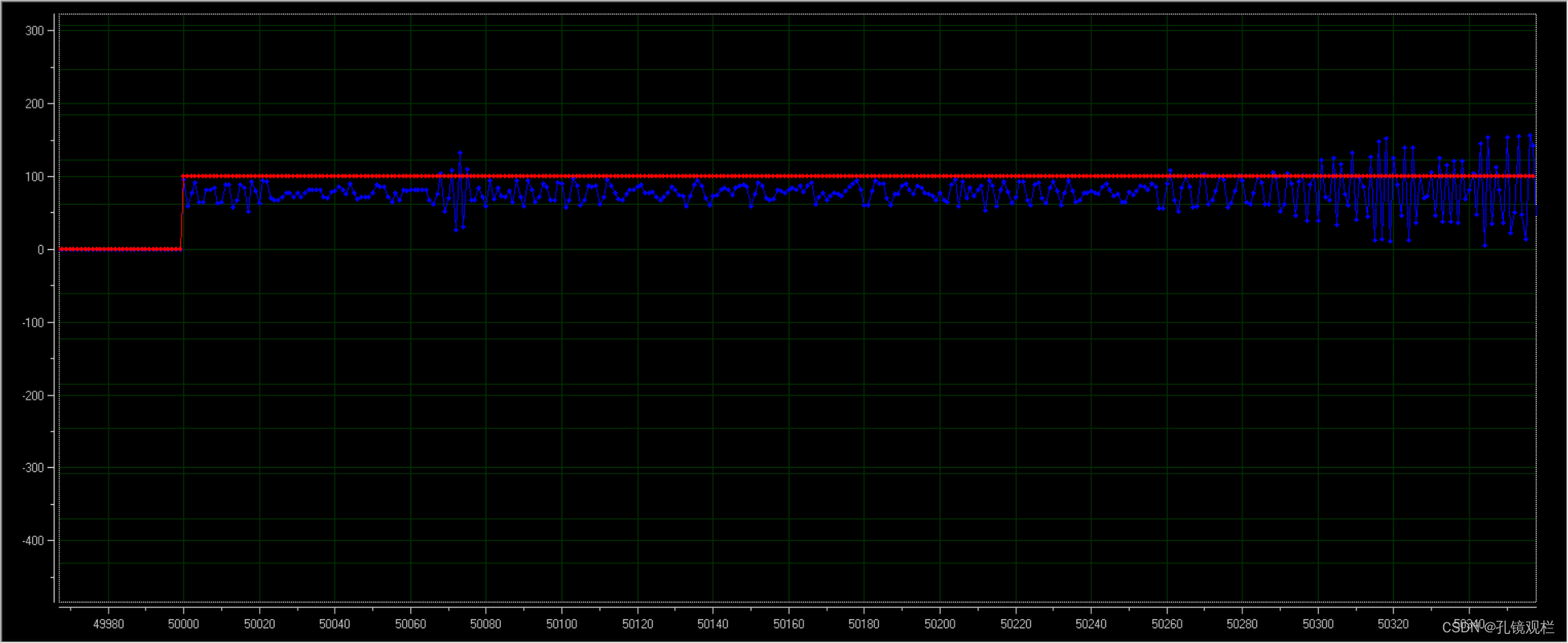
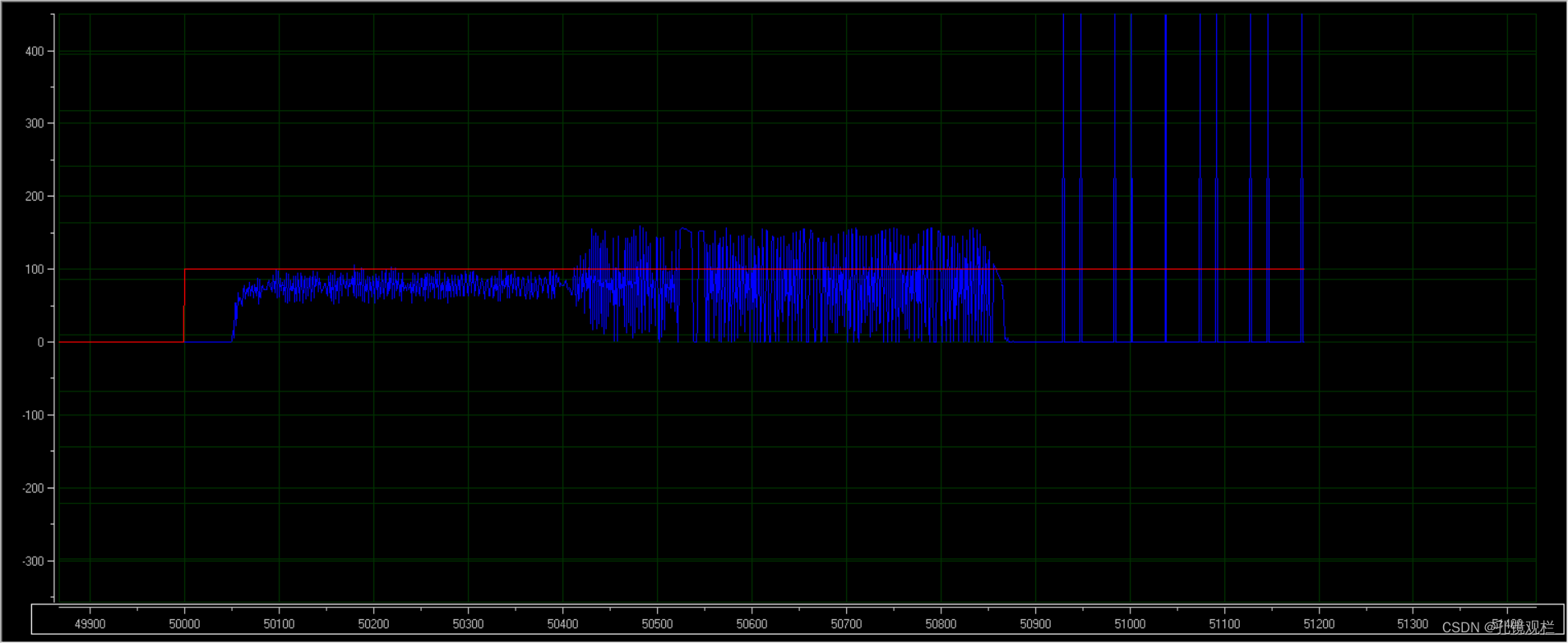
使用了增量式PID,有点难调,数据一直在波动。实际中调参具有很大的不确定性,因为你这次调好了,下次再供电发现又不是那么回事。按照网上传统的调参方法,一般是先调P,I和D为0,逐渐增大P使得实际值快速到达目标值;然后再调接I,使得实际值准确;最好调节D使得波动减小。但发现另一种说法,增量式PID应该先I再P后D。这两种方式我都试过。但还是波动很大。

使用了增量式PID,有点难调,数据一直在波动。实际中调参具有很大的不确定性,因为你这次调好了,下次再供电发现又不是那么回事。按照网上传统的调参方法,一般是先调P,I和D为0,逐渐增大P使得实际值快速到达目标值;然后再调接I,使得实际值准确;最好调节D使得波动减小。但发现另一种说法,增量式PID应该先I再P后D。这两种方式我都试过。但还是波动很大。