LWIP的RAW API UDP通信详解(stm32f103—enc28j60)
项目整体托管到github上
实现任务
通过接收到上位机端发送来的数据来实现控制开发板做相应的操作。
代码实现
首先看看几个主要的结构体
//发送数据包
struct sardata
{u8 head[4]; //标志头u16 length; //长度u8 humi[2]; //温湿度传感器状态u8 data[4]; //温度湿度数据u8 elengine[2];//电机及状态u8 led[3]; //led灯
};
//初始化上述结构体函数,用来发送数据包到上位机
void initsardata(void)
{u8 i;sendrecv.head[0]=0x5A;//Zsendrecv.head[1]=0x4E;//Nsendrecv.head[2]=0x4A;//Jsendrecv.head[3]=0x4A;//J 相当于前缀sendrecv.length=15;for(i=0;i<8;i++){sendrecv.data[i]=0x00;}sendrecv.humi[0]=0x00;//传感器0状态sendrecv.humi[1]=0x00;//传感器1状态sendrecv.elengine[0]=0x00;//电机0状态sendrecv.elengine[1]=0x00;//电机1状态sendrecv.led[0]=0x00;//led0状态sendrecv.led[1]=0x00;//led1状态sendrecv.led[2]=0x00;//led2状态
}
数据包是根据我们和服务器端所定的协议来构建的。如下图

udp_pcb udp协议控制块(用来装一些双方连接信息)
struct udp_pcb {
/* Common members of all PCB types */IP_PCB;/* 指向下一个PCB */struct udp_pcb *next;u8_t flags;/** 端口 本地和远端定义的端口号*/u16_t local_port, remote_port;#if LWIP_IGMP/** outgoing network interface for multicast packets */ip_addr_t multicast_ip;
#endif /* LWIP_IGMP */#if LWIP_UDPLITE/** used for UDP_LITE only */u16_t chksum_len_rx, chksum_len_tx;
#endif /* LWIP_UDPLITE *//** 接受回调函数*/udp_recv_fn recv;/** user-supplied argument for the recv callback 用户提供的回调函数 */void *recv_arg;
};
- ip_addr 32位的IP地址
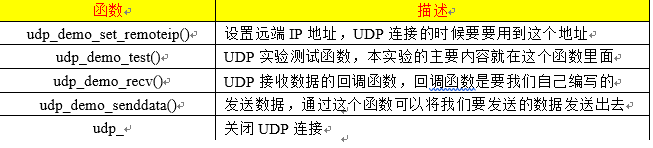
- 设置远端IP地址
/* This is the aligned version of ip_addr_t,used as local variable, on the stack, etc. */
struct ip_addr {u32_t addr;
};
/*此函数用来设置远端IP地址
*/
void udp_demo_set_remoteip(void)
{u8 *tbuf;u16 xoff;u8 key;POINT_COLOR=RED;tbuf=mymalloc(SRAMIN,100); //申请内存if(tbuf==NULL)return;//前三个IP保持和DHCP得到的IP一致 同一网段lwipdev.remoteip[0]=lwipdev.ip[0];//192lwipdev.remoteip[1]=lwipdev.ip[1];//168lwipdev.remoteip[2]=lwipdev.ip[2];//1lwipdev.remoteip[3]=(uint8_t)(0x01);//自己定义服务器端IPsprintf((char*)tbuf,"Remote IP:%d.%d.%d.",lwipdev.remoteip[0],lwipdev.remoteip[1],lwipdev.remoteip[2]);//远端IPPOINT_COLOR=BLUE;xoff=strlen((char*)tbuf)*8+30;printf("KEY1:+ KEY0:-\r\n"); printf("KEY_UP:OK\r\n");//此处使用可调节式的远端IP设置while(1){key=KEY_Scan(0);if(key==WKUP_PRES)break;else if(key){if(key==KEY1_PRES)lwipdev.remoteip[3]++;//IP增加if(key==KEY0_PRES)lwipdev.remoteip[3]--;//IP减少printf("%d.%d.%d.%d\r\n",lwipdev.remoteip[0],lwipdev.remoteip[1],lwipdev.remoteip[2],lwipdev.remoteip[3]);//显示新IP}} myfree(SRAMIN,tbuf);
} - 本地IP可从上述代码看出,本地IP采用DHCP动态分配的IP地址,如果分配不成功则使用默认设置IP,如下代码所示,还初始化了MAC、默认远端IP、默认子网掩码、默认网关。lwip控制结构体主要对上述结构体进行封装。
//lwip控制结构体
typedef struct
{u8 mac[6]; //MAC地址u8 remoteip[4]; //远端主机IP地址 u8 ip[4]; //本机IP地址u8 netmask[4]; //子网掩码u8 gateway[4]; //默认网关的IP地址vu8 dhcpstatus; //dhcp状态 //0,未获取DHCP地址;//1,进入DHCP获取状态//2,成功获取DHCP地址//0XFF,获取失败.
}__lwip_dev;
//lwip 默认IP设置
//lwipx:lwip控制结构体指针
void lwip_comm_default_ip_set(__lwip_dev *lwipx)
{//默认远端IP为:192.168.1.100lwipx->remoteip[0]=192; lwipx->remoteip[1]=168;lwipx->remoteip[2]=1;lwipx->remoteip[3]=100;//MAC地址设置(高三字节固定为:2.0.0,低三字节用STM32唯一ID)lwipx->mac[0]=enc28j60_dev.macaddr[0];lwipx->mac[1]=enc28j60_dev.macaddr[1];lwipx->mac[2]=enc28j60_dev.macaddr[2];lwipx->mac[3]=enc28j60_dev.macaddr[3];lwipx->mac[4]=enc28j60_dev.macaddr[4];lwipx->mac[5]=enc28j60_dev.macaddr[5]; //默认本地IP为:192.168.1.30lwipx->ip[0]=192; lwipx->ip[1]=168;lwipx->ip[2]=1;lwipx->ip[3]=30;//默认子网掩码:255.255.255.0lwipx->netmask[0]=255; lwipx->netmask[1]=255;lwipx->netmask[2]=255;lwipx->netmask[3]=0;//默认网关:192.168.1.1lwipx->gateway[0]=192; lwipx->gateway[1]=168;lwipx->gateway[2]=1;lwipx->gateway[3]=1; lwipx->dhcpstatus=0;//没有DHCP
}
int main(void)
主函数我们主要看下lwip_comm_init();与udp_demo_test();这两个函数。
extern u8 udp_demo_flag; //UDP 测试全局状态标记变量int main(void)
{ u8 key;delay_init(); //延时函数初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级uart_init(115200); //串口初始化为115200KEY_Init(); //初始化按键LED_Init(); //LED端口初始化TIM3_Int_Init(1000,719); //定时器3频率为100hz //系统时钟 用来保持LWIP精准计时MOTOR_PWM_Init(7199,0); //=====初始化PWM 10KHZ,用于驱动电机 如需初始化电调接口 改为MiniBalance_PWM_Init(9999,35) 200HZ FSMC_SRAM_Init(); //初始化外部SRAMmy_mem_init(SRAMIN); //初始化内部内存池my_mem_init(SRAMEX); //初始化外部内存池while(lwip_comm_init()) //lwip初始化 TCP/IP协议栈{delay_ms(1200);}printf("LWIP Init Success!\r\n");
#if LWIP_DHCP //使用DHCPwhile((lwipdev.dhcpstatus!=2)&&(lwipdev.dhcpstatus!=0XFF))//等待DHCP获取成功/超时溢出{lwip_periodic_handle(); //LWIP内核需要定时处理的函数}
#endifdelay_ms(500); //延时1sdelay_ms(500);udp_demo_test(); //UDP 模式 连接 连接成功就在此函数//连接失败才会执行 下面while(1)用来再次连接上位机while(1){ key = KEY_Scan(0);if(key == KEY1_PRES) //按KEY1键建立连接{if((udp_demo_flag & 1<<5)) printf("UDP连接已经建立,不能重复连接\r\n"); //如果连接成功,不做任何处理else udp_demo_test(); //当断开连接后,调用udp_demo_test()函数}delay_ms(10);}
}
u8 lwip_comm_init(void)
此函数的执行流程
- 初始化enc28j60模块
- 初始化lwip内核
- 设置默认IP等信息
- 如果使用DHCP,则开启DHCP服务并分配IP等信息
- 添加网口
- 设置网口为默认网口
- 打开网口
//LWIP初始化(LWIP启动的时候使用)
//返回值:0,成功
// 1,内存错误
// 2,DM9000初始化失败
// 3,网卡添加失败.
u8 lwip_comm_init(void)
{struct netif *Netif_Init_Flag; //调用netif_add()函数时的返回值,用于判断网络初始化是否成功struct ip_addr ipaddr; //ip地址struct ip_addr netmask; //子网掩码struct ip_addr gw; //默认网关 if(lwip_comm_mem_malloc())return 1; //内存申请失败if(ENC28J60_Init())return 2; //初始化ENC28J60lwip_init(); //初始化LWIP内核lwip_comm_default_ip_set(&lwipdev); //设置默认IP等信息#if LWIP_DHCP //使用动态IPipaddr.addr = 0;netmask.addr = 0;gw.addr = 0;
#else //使用静态IPIP4_ADDR(&ipaddr,lwipdev.ip[0],lwipdev.ip[1],lwipdev.ip[2],lwipdev.ip[3]);IP4_ADDR(&netmask,lwipdev.netmask[0],lwipdev.netmask[1] ,lwipdev.netmask[2],lwipdev.netmask[3]);IP4_ADDR(&gw,lwipdev.gateway[0],lwipdev.gateway[1],lwipdev.gateway[2],lwipdev.gateway[3]);printf("网卡en的MAC地址为:................%d.%d.%d.%d.%d.%d\r\n",lwipdev.mac[0],lwipdev.mac[1],lwipdev.mac[2],lwipdev.mac[3],lwipdev.mac[4],lwipdev.mac[5]);printf("静态IP地址........................%d.%d.%d.%d\r\n",lwipdev.ip[0],lwipdev.ip[1],lwipdev.ip[2],lwipdev.ip[3]);printf("子网掩码..........................%d.%d.%d.%d\r\n",lwipdev.netmask[0],lwipdev.netmask[1],lwipdev.netmask[2],lwipdev.netmask[3]);printf("默认网关..........................%d.%d.%d.%d\r\n",lwipdev.gateway[0],lwipdev.gateway[1],lwipdev.gateway[2],lwipdev.gateway[3]);
#endifNetif_Init_Flag=netif_add(&lwip_netif,&ipaddr,&netmask,&gw,NULL,ðernetif_init,ðernet_input);//向网卡列表中添加一个网口#if LWIP_DHCP //如果使用DHCP的话lwipdev.dhcpstatus=0; //DHCP标记为0dhcp_start(&lwip_netif); //开启DHCP服务
#endifif(Netif_Init_Flag==NULL)return 3;//网卡添加失败 else//网口添加成功后,设置netif为默认值,并且打开netif网口{netif_set_default(&lwip_netif); //设置netif为默认网口netif_set_up(&lwip_netif); //打开netif网口}return 0;//操作OK.
} ```### void udp_demo_test(void)
**此函数的执行流程**
*下面执行过程都是递进的只有全部都成功才会显示准备完毕(res=1)否则res=0*1. 设置远端IP地址(按键调节)2. 创建udp控制块udppcb3. 初始化发送包4. 将远端IP地址打包成32位 ip_addr rmtipaddr5. 将打包好的远端IP与端口号连接到udppcb6. 绑定本地IP地址与端口号7. 注册接受回调函数udp_demo_recv(此函数为我们接收到处理都在里面处理,后面详细讲解)8. 标记本地UDP准备完毕udp_demo_flag置一。9. while(){用户自定义发送,接收}10. 发送完毕,关闭连接。11. 释放申请的动态内存 ~~~c
//UDP测试
void udp_demo_test(void)
{err_t err;struct udp_pcb *udppcb; //定义一个UDP服务器控制块struct ip_addr rmtipaddr; //用来保存远端ip地址u8 *tbuf;u8 key;u8 res=0; udp_demo_set_remoteip();//设置远端IPtbuf=mymalloc(SRAMIN,200); //申请内存if(tbuf==NULL)return ; //内存申请失败了,直接退出sprintf((char*)tbuf,"Local IP:%d.%d.%d.%d",lwipdev.ip[0],lwipdev.ip[1],lwipdev.ip[2],lwipdev.ip[3]);//服务器IPsprintf((char*)tbuf,"Remote IP:%d.%d.%d.%d",lwipdev.remoteip[0],lwipdev.remoteip[1],lwipdev.remoteip[2],lwipdev.remoteip[3]);//远端IPsprintf((char*)tbuf,"Remote Port:%d",UDP_DEMO_PORT);//客户端端口号POINT_COLOR=BLUE;//字体为蓝色//创建一个UDP控制块udppcb=udp_new();//他自己的内存池创建initsardata();//初始化发送包if(udppcb)//创建成功{ IP4_ADDR(&rmtipaddr,lwipdev.remoteip[0],lwipdev.remoteip[1],lwipdev.remoteip[2],lwipdev.remoteip[3]);//打包成u32 位err=udp_connect(udppcb,&rmtipaddr,UDP_DEMO_PORT);//UDP客户端连接到指定IP地址和端口号的服务器if(err==ERR_OK){err=udp_bind(udppcb,IP_ADDR_ANY,UDP_DEMO_PORT);//绑定本地IP地址与端口号if(err==ERR_OK) //绑定完成{udp_recv(udppcb,udp_demo_recv,NULL);//注册接收回调函数 给相关的udppcb结构体元素赋值printf("STATUS:Connected \r\n");//标记连接上了(UDP是非可靠连接,这里仅仅表示本地UDP已经准备好)udp_demo_flag |= 1<<5; //标记已经连接上POINT_COLOR=RED;POINT_COLOR=BLUE;//蓝色字体}else res=1;}else res=1; }else res=1;/////根据用户需求自定义以下函数while(res==0)//连接成功{key=KEY_Scan(0);if(key==WKUP_PRES)break;if(key==KEY0_PRES)//KEY0按下了,发送数据{udp_demo_senddata(udppcb);} if(udp_demo_flag&1<<6)//是否收到数据?{udp_demo_senddata(udppcb);//根据需求收到后给予服务器端回应elengine_wyx = 1;//电机转动标志(保证每次接受到转动一次)udp_demo_flag&=~(1<<6);//标记数据已经被处理了.} lwip_periodic_handle();//轮询任务 维持LWIP内核delay_ms(2);}///udp_demo_connection_close(udppcb); myfree(SRAMIN,tbuf);
} 再来看看
void udp_demo_recv(void *arg,struct udp_pcb *upcb,struct pbuf *p,struct ip_addr *addr,u16_t port)
此函数的执行流程为
- 清空接收缓冲区
- 判断数据缓冲区剩余的空间是否够用,如果不够用则只拷贝一部分直至缓冲区满。(因为是循环存储拷贝的,所以可能存在这种情况)。
- 解析接收的数据包。
- 根据解析后的数据包,使系统做出相应处理。
- 记录远程IP地址并释放内存。
//UDP回调函数
//p为原始数据
//
void udp_demo_recv(void *arg,struct udp_pcb *upcb,struct pbuf *p,struct ip_addr *addr,u16_t port)
{u32 data_len = 0;struct pbuf *q;if(p!=NULL) //接收到不为空的数据时{memset(udp_demo_recvbuf,0,UDP_DEMO_RX_BUFSIZE); //数据接收缓冲区清零 for(q=p;q!=NULL;q=q->next) //遍历完整个pbuf链表 将p里面的数据拷贝到udp_demo_recvbuf缓冲区{//判断要拷贝到UDP_DEMO_RX_BUFSIZE中的数据是否大于UDP_DEMO_RX_BUFSIZE的剩余空间,如果大于//的话就只拷贝UDP_DEMO_RX_BUFSIZE中剩余长度的数据,否则的话就拷贝所有的数据if(q->len > (UDP_DEMO_RX_BUFSIZE-data_len)) memcpy(udp_demo_recvbuf+data_len,q->payload,(UDP_DEMO_RX_BUFSIZE-data_len));//拷贝数据else memcpy(udp_demo_recvbuf+data_len,q->payload,q->len);data_len += q->len; if(data_len > UDP_DEMO_RX_BUFSIZE) break; //超出TCP客户端接收数组,跳出 }readrecv();//读取接受缓冲区的东西,以便处理//需修改的话,修改此处Message_processing();/upcb->remote_ip=*addr; //记录远程主机的IP地址upcb->remote_port=port; //记录远程主机的端口号lwipdev.remoteip[0]=upcb->remote_ip.addr&0xff; //IADDR4lwipdev.remoteip[1]=(upcb->remote_ip.addr>>8)&0xff; //IADDR3lwipdev.remoteip[2]=(upcb->remote_ip.addr>>16)&0xff;//IADDR2lwipdev.remoteip[3]=(upcb->remote_ip.addr>>24)&0xff;//IADDR1 udp_demo_flag|=1<<6; //标记接收到数据了pbuf_free(p);//释放内存}else{udp_disconnect(upcb);udp_demo_flag &= ~(1<<5); //标记连接断开}
} 和回调函数有关的三个函数:解析函数 前缀判断函数 处理函数。这三个函数较简单。
前缀判断函数:根据前面说的ZNJJ协议来判断有效数据部分
u8 judge(void)//前缀判断函数
{u8 position;for(position=0;position<sendrecv.length;position++){if(udp_demo_recvbuf[position]==0x5A)//Zif(udp_demo_recvbuf[position+1]==0x4E)//Nif(udp_demo_recvbuf[position+2]==0x4A)//Jif(udp_demo_recvbuf[position+3]==0x4A)//Jbreak;}if(position>=sendrecv.length) return 0;//说明没找到有效数据位else return position+4;//让position指向第一个有效数据位
}void readrecv(void)
{u8 position;if(judge()==0);//判断数据是否符合ZNJJ 0 不符合 1 符合else//符合做相关处理{position=judge();//从该位提取控制数据 将接收数据存放在相应的标志位上sendrecv.led[0]=udp_demo_recvbuf[position];position++;sendrecv.led[1]=udp_demo_recvbuf[position];position++;sendrecv.led[2]=udp_demo_recvbuf[position];position++;sendrecv.elengine[0]=udp_demo_recvbuf[position];position++;sendrecv.elengine[1]=udp_demo_recvbuf[position];position++;sendrecv.humi[0]=((udp_demo_recvbuf[position]-0x30));position++;sendrecv.humi[1]=((udp_demo_recvbuf[position]-0x30));}
}void Message_processing()
{ //printf("l:%s e:%s %s \r\n",sendrecv.led,sendrecv.elengine,udp_demo_recvbuf);if(sendrecv.led[0]=='1') LED0=1;else LED0=0;if(sendrecv.led[1]=='1') LED1=1;else LED1=0;if(sendrecv.led[2]=='1') LED2=1;else LED2=0;//printf("wwwwwwwww%d \r\n",sendrecv.elengine[0]);if(sendrecv.humi[0]==1){//printf("wwwwwwwww%d \r\n",sendrecv.humi[0]);if(sendrecv.elengine[0]=='1'&&sendrecv.elengine[1]=='1'&&elengine_wyx)//控制发动机 elengine_wyx此变量用来控制在接收到一次数据时电机只转动一次,在接收时将他置为一{Open_Elengine_1(1);GPIO_ResetBits(GPIOB,GPIO_Pin_12);GPIO_ResetBits(GPIOB,GPIO_Pin_13);//printf("qqqqqqqqq%d %d\r\n",sendrecv.elengine[0],sendrecv.elengine[1]);elengine_wyx = 0;}if(sendrecv.elengine[0]=='1'&&sendrecv.elengine[1]=='0'&&elengine_wyx)//控制发动机 {Open_Elengine_1(0);//printf("wwwwwwwww%d \r\n",sendrecv.elengine[0]);elengine_wyx = 0;}}else{//printf("22222222%d \r\n",sendrecv.humi[0]);Close_Elengine_1();}if(sendrecv.elengine[0]=='0'&&sendrecv.elengine[1]=='1')//控制发动机 {//printf("eeeeeeeee%d %d\r\n",sendrecv.elengine[0],sendrecv.elengine[1]);Open_Elengine_2(); }if(sendrecv.elengine[0]=='0'&&sendrecv.elengine[1]=='0')//控制发动机 {Close_Elengine_2();//printf("rrrrrrrrr%d %d\r\n",sendrecv.elengine[0],sendrecv.elengine[1]);}
}void udp_demo_senddata(struct udp_pcb *upcb)//发送数据函数 所发送的数据包在全局变量sendrecv结构体中。
- 温湿度传感器读取数据存放到temp,humi中
- 设置temp与humi的值到sendrecv结构体的data中
- 将设置好的数据放到要发送的udp_demo_sendbuf字符串里面
- 把udp_demo_sendbuf放到ptr中。
- 发送ptr数据。
//UDP服务器发送数据
void udp_demo_senddata(struct udp_pcb *upcb)
{struct pbuf *ptr;ptr=pbuf_alloc(PBUF_TRANSPORT,strlen((char*)udp_demo_sendbuf),PBUF_POOL); //申请内存if(ptr)//申请成功{DHT11_Read_Data1(&temp1,&humi1);udp_demo_sendbuf=mymalloc(SRAMIN,sendrecv.length+1);setdata();setsendbuf(); //将被设置好的 sendrecv赋给udp_demo_sendbufprintf(":%s %d\r\n",udp_demo_sendbuf,strlen((char*)udp_demo_sendbuf));pbuf_take(ptr,(char*)udp_demo_sendbuf,strlen((char*)udp_demo_sendbuf));//构造ptr的数据部分udp_send(upcb,ptr); //udp发送数据 pbuf_free(ptr);//释放内存myfree(SRAMIN,udp_demo_sendbuf);}
}
//设置温湿度到sendrecv的data结构体
void setdata(void)
{//temp整数部分if(((temp1&0xf0)>>4)>=0x00&&((temp1&0xf0)>>4)<0x0A)sendrecv.data[0]=((temp1&0xf0)>>4)+0x30;elsesendrecv.data[0]=(temp1&0xf0)+0x37;//temp小数部分if((temp1&0x0f)>=0x00&&(temp1&0x0f)<0x0A) sendrecv.data[1]=(temp1&0x0f)+0x30;elsesendrecv.data[1]=(temp1&0x0f)+0x37;//humi整数if(((humi1&0xf0)>>4)>=0x00&&((humi1&0xf0)>>4)<0x0A) sendrecv.data[2]=((humi1&0xf0)>>4)+0x30;elsesendrecv.data[2]=(humi1&0xf0)+0x37;//humi小数if((humi1&0x0f)>=0x00&&(humi1&0x0f)<0x0A)sendrecv.data[3]=(humi1&0x0f)+0x30;elsesendrecv.data[3]=(humi1&0x0f)+0x37;printf("humi:%d temp: %d sendrecv.data:%s\r\n",humi1,temp1,sendrecv.data);
}
//将sendrecv结构体数据放到udp_demo_sendbuf中
void setsendbuf(void)
{u8 i;udp_demo_sendbuf[0]=sendrecv.head[0];udp_demo_sendbuf[1]=sendrecv.head[1];udp_demo_sendbuf[2]=sendrecv.head[2];udp_demo_sendbuf[3]=sendrecv.head[3];udp_demo_sendbuf[9]=sendrecv.humi[0]+0x30;udp_demo_sendbuf[10]=sendrecv.humi[1]+0x30;for(i=11;i<15;i++){udp_demo_sendbuf[i]=sendrecv.data[i-11];}udp_demo_sendbuf[7]=sendrecv.elengine[0];udp_demo_sendbuf[8]=sendrecv.elengine[1];udp_demo_sendbuf[4]=sendrecv.led[0];udp_demo_sendbuf[5]=sendrecv.led[1];udp_demo_sendbuf[6]=sendrecv.led[2];
}