一,概述
前面介绍过,三菱CNC数据采集一般有两种方法:
(1)通过官方A2 API(也叫EZSocket)进行数据采集,需要安装A2驱动包(仅适用于windows系统)
(2)通过纯TCP协议方法。该方法不局限于CPU架构(x86、ARM、MIPS等等),不局限操作系统(Windows、Linux、FreeRTOS、RT-Thread、μC/OS、裸机等等均可),不局限编程语言(Java、Python、C/C++、C#、Go等等均可)。
下面对两种方法都进行相应介绍。
PS:建议直接用纯协议方式。比如产品使用ARM Cortex-M,可以做到非常高的性价比,也可以方便集成到软件平台里,欢迎交流扣扣17082750。
二,A2 API方式
1,安装驱动包,可从下面地址下载:
三菱CNC_三菱数控系统_数据采集_驱动_A2驱动,附c#demo源码-C#文档类资源-CSDN下载

2,安装完成后在默认路径下会产生通讯库,可以直接用最新版本的,复制到程序运行目录下,直接引用就可以了。
3,撸代码
if (lSystemType == (int)sysType.EZNC_SYS_MELDASC6C64 || lSystemType == (int)sysType.EZNC_SYS_MELDAS700M || lSystemType == (int)sysType.EZNC_SYS_MELDAS700L || lSystemType == (int)sysType.EZNC_SYS_MELDAS800M || lSystemType == (int)sysType.EZNC_SYS_MELDAS800L)
{if (lSystemType == (int)sysType.EZNC_SYS_MELDASC6C64){lResult = EZNcCom.SetTCPIPProtocol(strHostName, 64758);}else{lResult = EZNcCom.SetTCPIPProtocol(strHostName, 684);}ErrorCheck("SetTCPIPProtocol");if (lResult == 0){lResultOpen = EZNcCom.Open2(5, lMachine, lTimeOut, "EZNC_LOCALHOST");//EZNC_LOCALHOST//lResultOpen = EZNcCom.Open(lSystemType, lMachine, lTimeOut, strHostName);//EZNC_LOCALHOSTlResult = lResultOpen;ErrorCheck("Open");}
}
else
{lResultOpen = EZNcCom.Open2(lSystemType, lMachine, lTimeOut, strHostName);ErrorCheck("Open");
}
4,EZSocket可以直接实现的有下述功能:
(1)通信功能
(2)NC系统功能(如系统版本、报警等读取)
(3)位置功能(各种坐标读取等)
(4)命令值(G代码模态值、刀补编号、M/S/T/B功能指令模态等读取)
(5)程序(程序编号、段编号、当前段读取)
(6)时间(系统时间、自动运行时间等读取)
(7)轴监视(伺服轴、主轴、辅助轴等各种状态读取)
(8)运行状态(在原点位置等状态读取)
(9)文件(PC文件和NC文件读写)
(10)共变量(共变量读取)
(11)局变量(局变量、子程序嵌套层数读取)
(12)刀具(刀补数据、刀具寿命管理数据、工件坐标系等读取)
(13)ATC(刀库功能读写)
(14) 参数(所有NC内参数读写)
(15)操作(部分NC操作管理)
(16)PLC接口(PLC接口读写)
(17) 其它NC特殊功能读写
三,纯协议方式
直接建立TCP连接,能够采集的数据也是非常丰富的
bool CMITSUBISHI_PROTOCOLDlg::LinkFirstMachine(int cn)
{// 连接服务器if(!m_bInit[cn]) //如果没有连接服务器{ //以下从文件中得到服务器的IP地址m_clientsocket.Create();GetDlgItemText(IDC_IPADDRESS_NC,IPstring[cn]);//控制器原IP地址 if(m_clientsocket.Connect(IPstring[cn],683)){ m_clientsocket.Init(this); Message_bar.Format("已经连接%d",cn);GetDlgItem(IDC_STATIC_MESS)->SetWindowText(Message_bar); m_bInit[cn]=true;}else{m_clientsocket.Close();Message_bar.Format("无法连接%d",cn);GetDlgItem(IDC_STATIC_MESS)->SetWindowText(Message_bar); m_bInit[cn]=false;}} return m_bInit[cn];
}switch(ID.v)
{//时间case ID_POWER: mit.T_PowerON=l_value; break; //开机时间case ID_AUTO: mit.T_AutoRun=l_value; break; //自动运转case ID_START :mit.T_AutoStart=l_value; break; //自动启动时间 STLcase ID_PROCESS:mit.T_Process=l_value; break; //伺服case ID_SERVO_NAME1 : mit.name1=m_strValue; break; case ID_SERVO_NAME2 : mit.name2=m_strValue; break; case ID_SERVO_NAME3 : mit.name3=m_strValue; break; //Xcase ID_POS_CURRENT_X: mit.m_strCurr1=d_value; break;case ID_POS_WORK_X: mit.m_strWork1=d_value; break;case ID_POS_MACHINE_X: mit.m_strM1=d_value; break;case ID_POS_DIS_X: mit.m_strDis1=d_value; break;case ID_SERVO_GAINX: mit.gain_x=d_value; break;case ID_SERVO_IX: mit.current_x=i_value;break; //负荷电流case ID_SERVO_LOADX: mit.load_x=l_value;break; //Ycase ID_POS_CURRENT_Y: mit.m_strCurr2=d_value; break;case ID_POS_WORK_Y: mit.m_strWork2=d_value; break;case ID_POS_MACHINE_Y: mit.m_strM2=d_value; break;case ID_POS_DIS_Y: mit.m_strDis2=d_value; break;case ID_SERVO_GAINY: mit.gain_y=d_value; break;case ID_SERVO_IY: mit.current_y=i_value;break;case ID_SERVO_LOADY: mit.load_y=l_value;break; //Zcase ID_POS_CURRENT_Z: mit.m_strCurr3=d_value; break;case ID_POS_WORK_Z: mit.m_strWork3=d_value; break;case ID_POS_MACHINE_Z: mit.m_strM3=d_value; break;case ID_POS_DIS_Z: mit.m_strDis3=d_value; break;case ID_SERVO_GAINZ: mit.gain_z=d_value; break;case ID_SERVO_IZ: mit.current_z=i_value; break;case ID_SERVO_LOADZ: mit.load_z=l_value; break; case ID_SPENDLE_GAIN : mit.gain=d_value; break; //主轴增益 数据类型是6 DOUBLEcase ID_SPENDLE_TEMP : mit.tmep=i_value; break; //温度 2 intcase ID_SPENDLE_LOAD : mit.load=l_value; break; //负载 数据类型是3 LONGcase ID_SPENDLE_I: mit.current=i_value; break; //电流 % 2 intcase ID_SPENDLE_SPEED: mit.speed=d_value; break; //速度 6case ID_RDY_HLD: GetDlgItem(IDC_RDY_STATE)->SetWindowText(m_strValue); break;case ID_PROC_MODE: GetDlgItem(IDC_RDY_MODE)->SetWindowText(m_strValue); break;case ID_SERVO_NUM: GetDlgItem(IDC_AXIZ_NUM)->SetWindowText(m_strValue); break; //BYTE//主轴数量case ID1039N: GetDlgItem(IDC_SPENDLE_NUM)->SetWindowText(m_strValue); break; //间隙补偿case ID4007_1: mit.enc_comp1=d_value; break; //doublecase ID4007_2: mit.enc_comp2=d_value; break; //doublecase ID4007_3: mit.enc_comp3=d_value; break; //double//G00反向间隙case ID2011X: mit.backlashx_g0=l_value; break; //LONGcase ID2011Y: mit.backlashy_g0=l_value; break; //LONGcase ID2011Z: mit.backlashz_g0=l_value; break; //LONG//G01反向间隙case ID2012X: mit.backlashx_g1=l_value; break; //LONGcase ID2012Y: mit.backlashy_g1=l_value; break; //LONGcase ID2012Z: mit.backlashz_g1=l_value; break; //LONG......
}
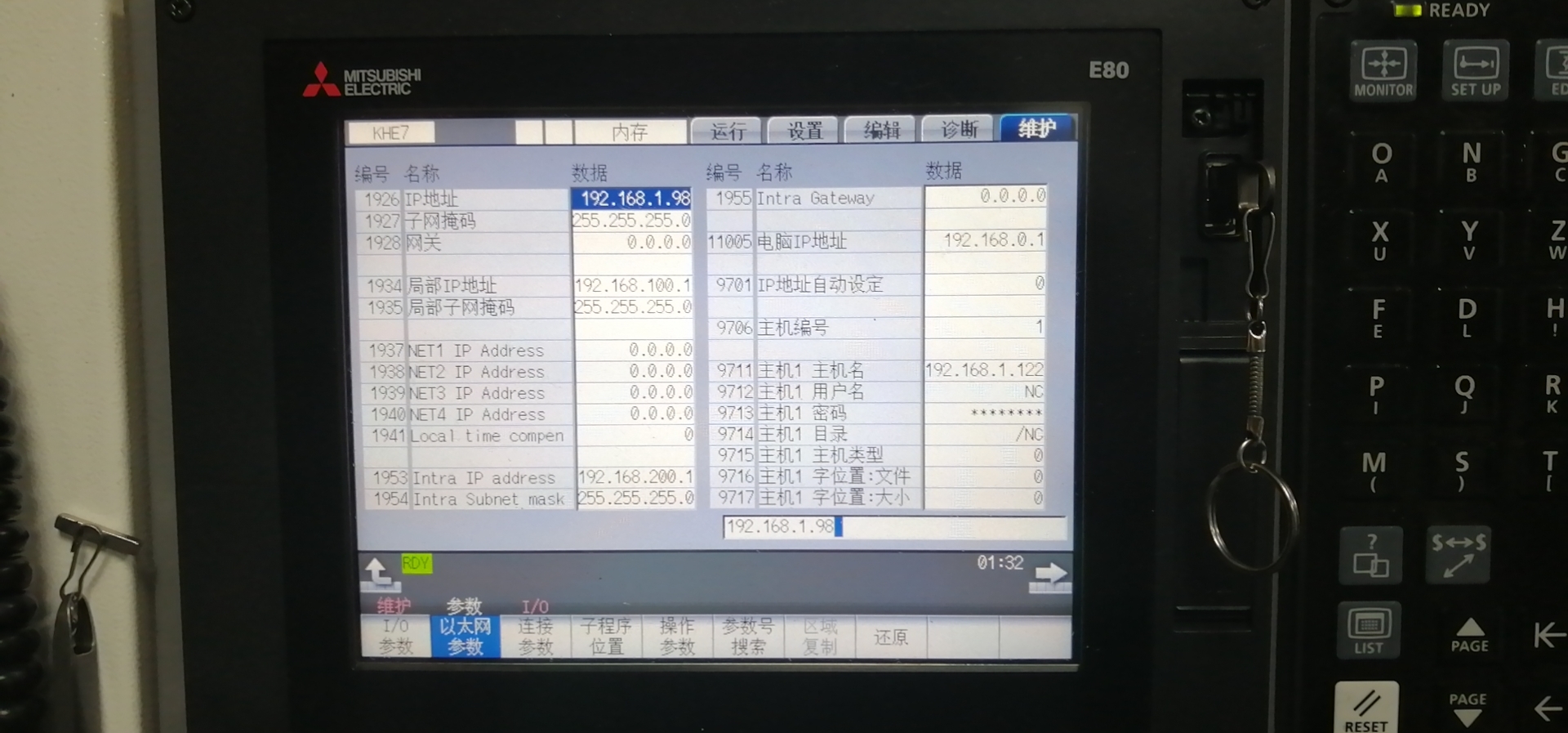
四,机台配置IP
1.点击右上角维护
2.左下角切换找到以太网参数或基本公用PRM
3.找到参数1926