文章目录
- 一、基于CMake,对文件/目录组织规范
- 1.推荐的目录组织方式
- 2.划分子项目
- 3.根项目的 CMakeLists.txt 配置
- 4.子项目的 CMakeLists.txt 配置
- 5.子项目的头文件
- 6.子项目的源文件
- 补充:GLOB 和 GLOB_RECRUSE 的区别
- 7.头文件和源文件的一一对应关系
- 8.只有头文件,没有源文件的情况
- 9.每新增一个功能模块,需要创建两个文件
- 10.一个模块依赖其他模块,则应导入他的头文件
- 11.依赖其他模块但不解引用,则可以只前向声明不导入头文件
- 11.以项目名为名字空间(namsepace),避免符号冲突
- 12.依赖另一个子项目,则需要链接他
- 13.CMake 的 include 功能
- 补充:macro 和 function 的区别
- 二、用find_package 寻找系统中第三方库/依赖项配置
- 1.find_package 命令
- 2.find_package 说是找“包”,到底是在找什么?
- 3.Unix 类系统下的搜索路径
- 4.安装在非标准路径的库
- 补充:类似 Qt 这种亲 Unix 软件,在 Linux 下的目录组织格式
- 补充:亲 Unix 软件从源码安装的通用套路
- 5.如果第三方库发懒,没有提供 Config 文件怎么办?
- 补充:自己编写一个FindXXX.cmake
- 6.现代CMake的find_package VS 古代CMake的find_package
- 7.find_package 的两种模式
- 8.关于 vcpkg 的坑
- 9.语义版本号(semantic versioning)系统
- 10.find_package 命令指定版本
- 11.使用非标准路径库总结
- 其他
- 1.变量,函数,类与extern
- 2.#include <biology/Carer.h>和#include "biology/Carer.h"区别
一、基于CMake,对文件/目录组织规范
1.推荐的目录组织方式
目录组织格式:
- 项目名/include/项目名/模块名.h
- 项目名/src/模块名.cpp
CMakeLists.txt 中写:
- target_include_directories(项目名 PUBLIC include)
源码文件中写:
#include <项目名/模块名.h>
项目名::函数名();
头文件(项目名/include/项目名/模块名.h)中写:
#pragma once
namespace 项目名 {
void 函数名();
}
实现文件(项目名/src/模块名.cpp)中写:
#include <项目名/模块名.h>
namespace 项目名 {
void 函数名() { 函数实现 }
}
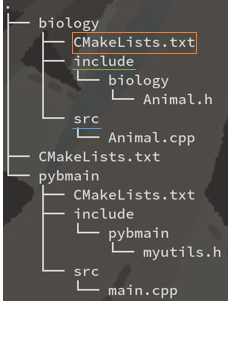
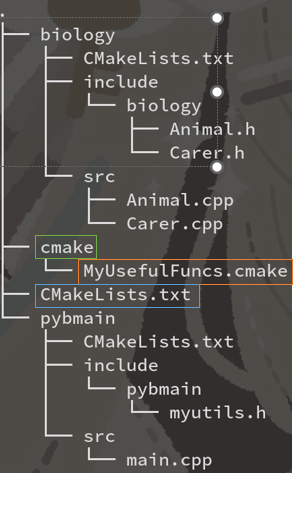
2.划分子项目
eg:
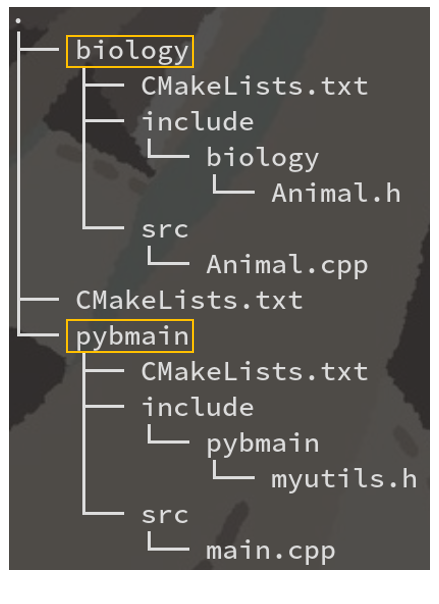
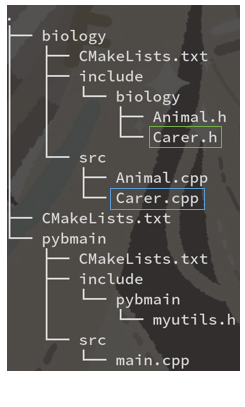
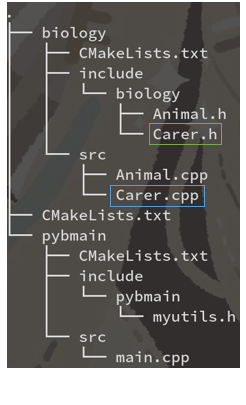
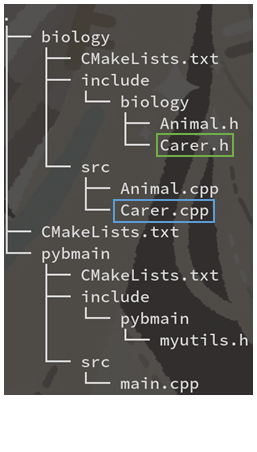
大型的项目,往往会划分为几个子项目。
即使你只有一个子项目,也建议你先创建一个子目录,方便以后追加新的子项目。
上图的案例中,我们在根目录下,创建了两个子项目 biology 和 pybmain,他们分别在各自的目录下有自己的 CMakeLists.txt。
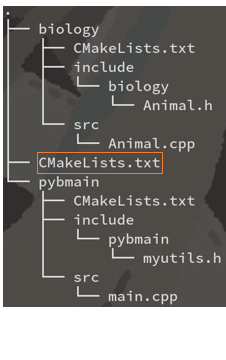
3.根项目的 CMakeLists.txt 配置
cmake_minimum_required(VERSION 3.18)if (NOT CMAKE_BUILD_TYPE)set(CMAKE_BUILD_TYPE Release)
endif()
set(CMAKE_CXX_STANDARD 20)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(CMAKE_CXX_EXTENSIONS OFF)
set(CMAKE_MODULE_PATH "${CMAKE_CURRENT_LIST_DIR}/cmake;${CMAKE_MODULE_PATH}")project(CppCMakeDemo LANGUAGES CXX)include(MyUsefulFuncs)add_subdirectory(pybmain)
add_subdirectory(biology)
- 在根项目的 CMakeLists.txt 中,设置了默认的构建模式,设置了统一的 C++ 版本等各种选项。
- 然后通过 project 命令初始化了根项目。
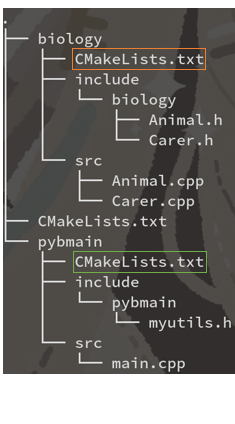
- 随后通过 add_subdirectory 把两个子项目 pybmain 和 biology 添加进来(顺序无关紧要),这会调用 pybmain/CMakeLists.txt 和 biology/CMakeLists.txt。
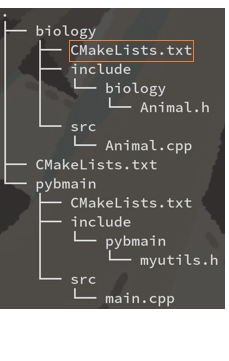
4.子项目的 CMakeLists.txt 配置
file(GLOB_RECURSE srcs CONFIGURE_DEPENDS src/*.cpp include/*.h)
add_library(biology STATIC ${srcs})
target_include_directories(biology PUBLIC include)-
子项目的 CMakeLists.txt 就干净许多,只是创建了 biology 这个静态库对象,并通过 GLOB_RECRUSE 为他批量添加了所有位于 src 和 include 下源码和头文件。
-
根项目的 CMakeLists.txt 负责处理全局有效的设定。而子项目的 CMakeLists.txt 则仅考虑该子项目自身的设定,比如他的头文件目录,要链接的库等等。
5.子项目的头文件


- 这里我们给 biology 设置了头文件搜索路径 include。
- 因为子项目的 CMakeLists.txt 里指定的路径都是相对路径,所以这里指定 include 实际上是:根/biology/include。
- 注意我们用了 PUBLIC 修饰符,这是为了让链接 biology 的 pybmain 也能够共享 根/biology/include 这个头文件搜索路径。
6.子项目的源文件

- 这里我们给 biology 批量添加了 src/*.cpp 下的全部源码文件。
- 明明只有 .cpp 需要编译,为什么还添加了 include/.h?为了头文件也能被纳入 VS 的项目资源浏览器,方便编辑。(Linux则不需要添加)
- 因为子项目的 CMakeLists.txt 里指定的路径都是相对路径,所以这里指定 src 实际上是:根/biology/src。
补充:GLOB 和 GLOB_RECRUSE 的区别
file (GLOB myvar CONFIGURE_DEPENDS src/*.cpp)
file (GLOB_RECURSE myvar CONFIGURE_DEPENDS src/*.cpp)
-
疑问1:都是按照通配符批量匹配文件,有什么区别?
GLOB: src/main.cpp(√) src/test/main.cpp(×)
GLOB_RECURSE: src/main.cpp(√) src/test/main.cpp(√)
区别在于 GLOB_RECURSE 允许 * 匹配嵌套的目录。 -
疑问2:加了 CONFIGURE_DEPENDS 这个选项有什么区别?
如果不加,在你创建新文件时,myvar 不会自动更新,还是旧的那几个文件,可能出现 undefined symbol,需要重新运行 cmake -B build 才能更新。
加了,则每次 cmake --build 时自动检测目录是否更新,如果目录有新文件了,CMake 会自动帮你重新运行 cmake -B build 更新 myvar 变量。
注:如果脚本每次都执行cmake -B build && cmake --build build则不需要关心
7.头文件和源文件的一一对应关系
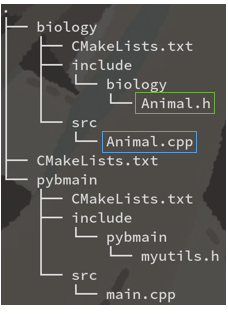
-
通常每个头文件都有一个对应的源文件,两个文件名字应当相同(方便我们理解,也方便 IDE 跳转),只有后缀名不一样。
-
如果是一个类,则文件名应和类名相同,方便查找(Animal.cpp)。
-
头文件中包含函数和类的声明,源文件则包含他们的实现。
8.只有头文件,没有源文件的情况
- 有时我们会直接把实现直接写在头文件里,这时可以没有与之对应的源文件,只有一个头文件。
- 注意:在头文件里直接实现函数时,要加 static 或 inline 关键字
- 若是类的话,可以把声明和定义写在一起,都放在头文件里面,因为类默认有inline属性,类是weak符号,是不会冲突的

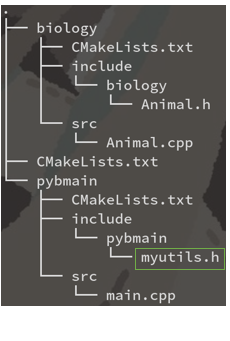
9.每新增一个功能模块,需要创建两个文件
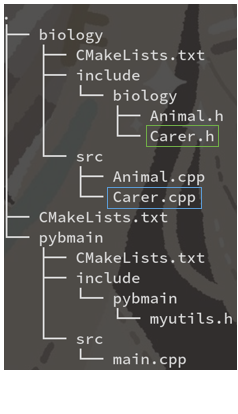
- 添加一个新功能模块 Carer 时,同时添加同名的源文件和头文件。
- 头文件中的声明和源文件中的实现一一对应。
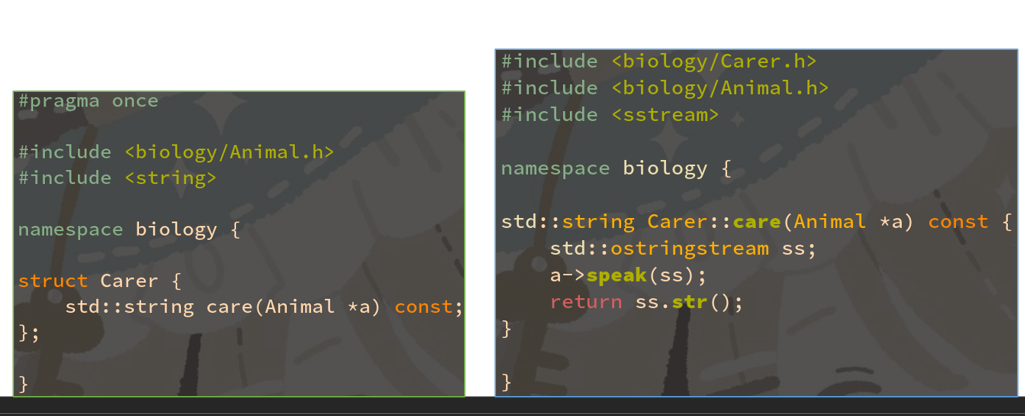
10.一个模块依赖其他模块,则应导入他的头文件
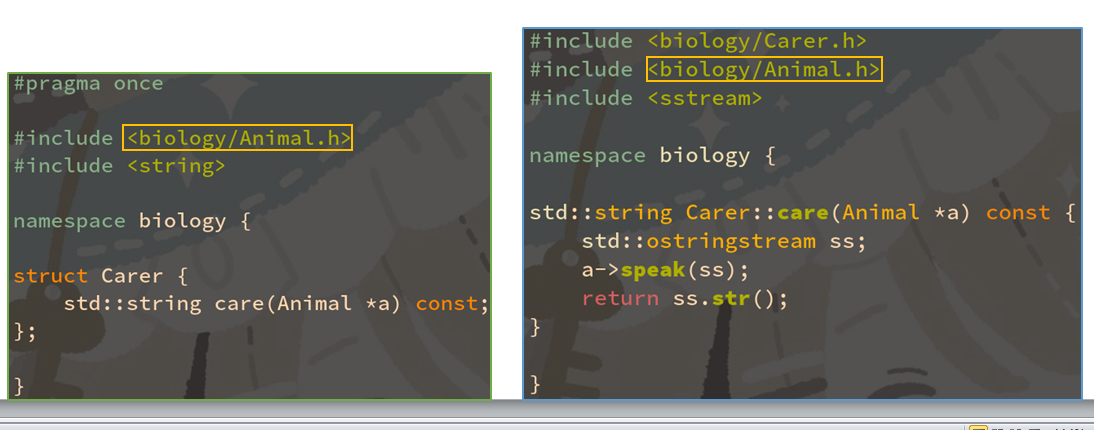
如果新模块(Carer)中用到了其他模块(Animal)的类或函数,则需要在新模块(Carer)的头文件和源文件中都导入其他模块(Animal)的头文件。
- 注意不论是项目自己的头文件还是外部的系统的头文件,请全部统一采用 <项目名/模块名.h> 的格式。不要用 “模块名.h” 这种相对路径的格式,避免模块名和系统已有头文件名冲突。
11.依赖其他模块但不解引用,则可以只前向声明不导入头文件
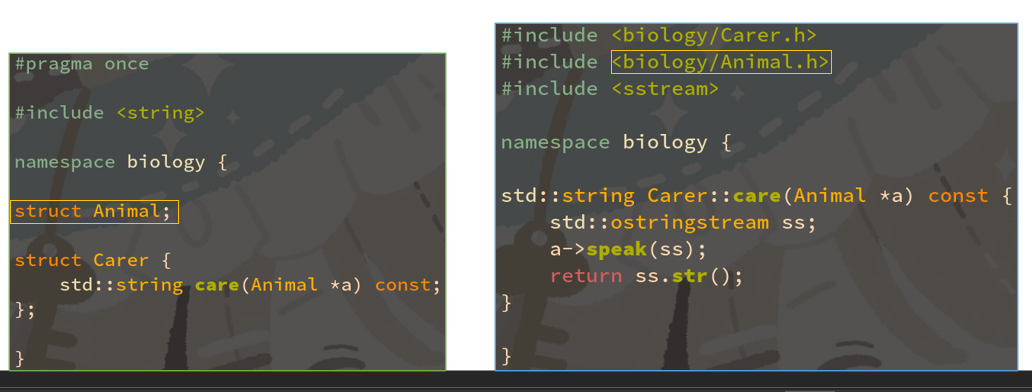
那么这个头文件是不需要导入 Animal.h 的,只需要一个前置声明 struct Animal,只有实际调用了 Animal 成员函数的源文件需要导入 Animal.h。
- 好处:加快编译速度,防止循环引用。
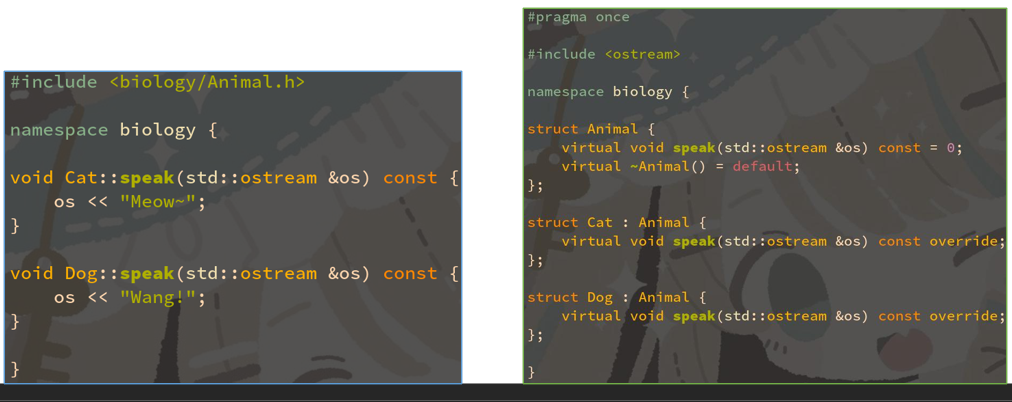
11.以项目名为名字空间(namsepace),避免符号冲突

在声明和定义外面都套一层名字空间,例如此处我的子项目名是 biology,那我就 biology::Animal。避免暴露全局的 Animal。
- 这是因为万一有个“不拘一格”的第三方库也暴露个全局的 Animal,两个符号就会发生冲突,由于类符号都具有 weak 属性,链接器会随机选择一个覆盖掉,非常危险!
12.依赖另一个子项目,则需要链接他

- 让 pybmain 链接上 biology:target_link_libraries(pybmain PUBLIC biology)
- 由于 PUBLIC 属性具有传染性,根/biology/include 现在也加入 pybmain 的头文件搜索路径了,因此 pybmain 里可以 #include 到 biology 的头文件。
- 同理如果又有一个 target_link_libraries(zxxpig PUBLIC pybmain) 那么 zxxpig 也有 pybmain 和 biology 的所有头文件搜索路径了。
13.CMake 的 include 功能
和 C/C++ 的 #include 一样,CMake 也有一个 include 命令。
你写 include(XXX),则他会在 CMAKE_MODULE_PATH 这个列表中的所有路径下查找 XXX.cmake 这个文件。
- 这样你可以在 XXX.cmake 里写一些你常用的函数,宏,变量等。

补充:macro 和 function 的区别
macro 相当于直接把代码粘贴过去,直接访问调用者的作用域。这里写的相对路径 include 和 src,是基于调用者所在路径。
function 则是会创建一个闭包,优先访问定义者的作用域。这里写的相对路径 include 和 src,则是基于定义者所在路径。
- cmake-function
- cmake-macro
include 相当于直接把代码粘贴过去,直接访问调用者的作用域。这里创建的变量和外面共享,直接 set(key val) 则调用者也有 ${key} 这个变量了。
function 中则是基于定义者所在路径,优先访问定义者的作用域。这里需要 set(key val PARENT_SCOPE) 才能修改到外面的变量。
二、用find_package 寻找系统中第三方库/依赖项配置
1.find_package 命令
常用参数列表一览:
find_package(<PackageName> [version] [EXACT] [QUIET] [CONFIG] [MODULE][REQUIRED] [[COMPONENTS] [components...]][OPTIONAL_COMPONENTS components...]
find_package 命令用法举例
find_package(OpenCV)
查找名为 OpenCV 的包,找不到不报错,事后可以通过 ${OpenCV_FOUND} 查询是否找到。find_package(OpenCV QUIET)
查找名为 OpenCV 的包,找不到不报错,也不打印任何信息。find_package(OpenCV REQUIRED) # 最常见用法
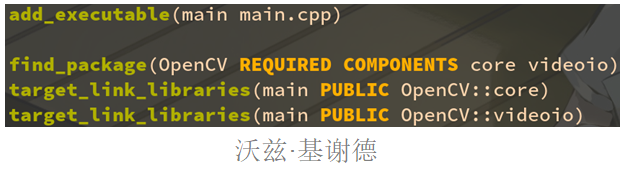
查找名为 OpenCV 的包,找不到就报错(并终止 cmake 进程,不再继续往下执行)。find_package(OpenCV REQUIRED COMPONENTS core videoio)
查找名为 OpenCV 的包,找不到就报错,且必须具有 OpenCV::core 和 OpenCV::videoio 这两个组件,如果没有这两个组件也会报错。find_package(OpenCV REQUIRED OPTIONAL_COMPONENTS core videoio)
查找名为 OpenCV 的包,找不到就报错,可具有 OpenCV::core 和 OpenCV::videoio 这两个组件,没有这两组件不会报错,通过 ${OpenCV_core_FOUND} 查询是否找到 core 组件。
2.find_package 说是找“包”,到底是在找什么?
- find_package(OpenCV) 实际上是在找一个名为 OpenCVConfig.cmake 的文件。
注:出于历史兼容性考虑,除了 OpenCVConfig.cmake 以外 OpenCV-config.cmake 这个文件名也会被 CMake 识别到。 - 同理,find_package(Qt5) 则是会去找名为 Qt5Config.cmake 的文件。
这些形如 包名 + Config.cmake 的文件,我称之为包配置文件。
Qt5Config.cmake 是你安装 Qt5 时,随 libQt5Core.so 等实际的库文件,一起装到你的系统中去的。 - 以 Arch Linux 系统为例:
包配置文件位于 /usr/lib/cmake/Qt5/Qt5Config.cmake。
实际的动态库文件位于 /usr/lib/libQt5Core.so。
这个包配置文件(例如Qt5Config.cmake),这个配置文件里包含了包的具体信息,包括动态库文件的位置,头文件的目录,链接时需要开启的编译选项等等。
-
而且某些库都具有多个子动态库,例如 Qt 就有 libQt5Core.so、libQt5Widgets.so、libQt5Network.so。因此 CMake 要求所有第三方库作者统一包装成一个 Qt5Config.cmake 文件包含所有相关信息(类似于 nodejs 的 package.json),比你单独的一个个去找动态库文件要灵活的多
-
包配置文件由第三方库的作者(Qt的开发团队)提供,在这个库安装时(Qt的安装程序或apt install等)会自动放到 /usr/lib/cmake/XXX/XXXConfig.cmake 这个路径(其中XXX是包名),供 CMake 用户找到并了解该包的具体信息。
-
/usr/lib/cmake 这个位置是 CMake 和第三方库作者约定俗成的,由第三方库的安装程序负责把包配置文件放到这里。
-
如果第三方库的作者比较懒,没提供 CMake 支持(由安装程序提供XXXConfig.cmake),那么得用另外的一套方法(FindXXX.cmake)
3.Unix 类系统下的搜索路径
<prefix>/(lib/<arch>|lib*|share)/cmake/<name>*/
<prefix>/(lib/<arch>|lib*|share)/<name>*/
<prefix>/(lib/<arch>|lib*|share)/<name>*/cmake/
<prefix>/<name>*/(lib/<arch>|lib*|share)/cmake/<name>*/
<prefix>/<name>*/(lib/<arch>|lib*|share)/<name>*/
<prefix>/<name>*/(lib/<arch>|lib*|share)/<name>*/cmake/其中 <prefix> 是变量 ${CMAKE_PREFIX_PATH},Unix 平台默认为 /usr。
<name> 是你在 find_package(<name> REQUIRED) 命令中指定的包名。
<arch> 是系统的架构,例如 x86_64-linux-gnu 或 i386-linux-gnu。
(Ubuntu 喜欢把库文件套娃在 /usr/lib/x86_64-linux-gnu 目录下)
- <name> 可以有额外后缀,且不分大小写(无论 Linux 还是 Windows)
/usr/lib/cmake/OpenCV/OpenCVConfig.cmake
/usr/lib/cmake/opencv4/OpenCVConfig.cmake
同样都是可以被 find_package(OpenCV REQUIRED) 搜索到的。
- eg:例如你是 64 位的 Linux 系统,find_package(Qt5 REQUIRED) 会依次搜索:
/usr/lib/cmake/Qt5/Qt5Config.cmake
/usr/lib/x86_64-linux-gnu/cmake/Qt5/Qt5Config.cmake
/usr/share/cmake/Qt5/Qt5Config.cmake
/usr/lib/Qt5/Qt5Config.cmake
/usr/lib/x86_64-linux-gnu/Qt5/Qt5Config.cmake
/usr/share/Qt5/Qt5Config.cmake
/usr/Qt5/lib/cmake/Qt5/Qt5Config.cmake
/usr/Qt5/lib/x86_64-linux-gnu/cmake/Qt5/Qt5Config.cmake
/usr/Qt5/share/cmake/Qt5/Qt5Config.cmake
/usr/Qt5/lib/Qt5/Qt5Config.cmake
/usr/Qt5/lib/x86_64-linux-gnu/Qt5/Qt5Config.cmake
/usr/Qt5/share/Qt5/Qt5Config.cmake
4.安装在非标准路径的库
以 Qt5 为例,如果你安装在下列标准路径,find_package 能够自动找到。
Linux:/usr/lib/cmake/Qt5/Qt5Config.cmake。
但是假如我的库不是装在这些标准路径,而是我自定义的路径,怎么办?
- 这时你需要手动指定一个变量告诉他在哪儿,可以是普通变量 ${Qt5_DIR},也可以是环境变量 $ENV{Qt5_DIR},两个中只要设置了任何一个 find_package 都可以识别到。
- 变量一般通过命令行 -DQt5_DIR=”C:/Program Files/Qt5.12.1/lib/cmake/Qt5” 设置。
例如我把 Qt5 安装到了 /opt/Qt5.12.1。
- 首先找到他里面的 Qt5Config.cmake 文件所在位置
- 假如你找到该文件的位置是 /opt/Qt5.12.1/lib/cmake/Qt5/Qt5Config.cmake,那么请你设置变量 Qt5_DIR 为 /opt/Qt5.12.1/lib/cmake/Qt5。
(1) 单次有效。在 configure 阶段,可以从命令行设置:
cmake -B build -DQt5_DIR=”/opt/Qt5.12.1/lib/cmake/Qt5”(2) 全局启用。修改你的 ~/.bashrc 文件添加环境变量:
export Qt5_DIR=”/opt/Qt5.12.1/lib/cmake/Qt5”,然后重启终端。这样以后你每次构建任何项目,find_package 都能自动找到这个路径的 Qt5 包了。(3) 单项目有效。直接在你自己项目的 CMakeLists.txt 最开头写一行:
set(Qt5_DIR ”/opt/Qt5.12.1/lib/cmake/Qt5”) # 一定要加在最前面!cmake -B build -DQt5_DIR=D:/Qt5 # 只需要第一次指定好,
cmake -B build # 以后第二次运行可以省略!
rm -rf build # 只有清理了 build 以后,
cmake -B build -DQt5_DIR=D:/Qt5 # 才需要重新指定。
补充:类似 Qt 这种亲 Unix 软件,在 Linux 下的目录组织格式
Linux 用户从源码安装 Qt 这种库时,会有一个 --prefix 选项,指定安装的根路径。
- 默认的 --prefix 是 /usr,这个路径由全部软件共享,Qt 会把他的文件安装到以下目录:
/usr/include/qt/QtCore/qstring.h(实际的头文件,对应 Qt5::Core)
/usr/lib/libQt5Core.so(实际的动态库文件,对应 Qt5::Core)
/usr/lib/libQt5Core.a(实际的静态库文件,对应 Qt5::Core)/usr/lib/cmake/Qt5/Qt5Config.cmake(包配置文件,用于 find_package)
- 假如你指定 --prefix=/usr/local,这个路径通常是用户自己手动装的软件,那么就会变成:
/usr/local/lib/cmake/Qt5/Qt5Config.cmake
- 假如你指定 --prefix=/opt/myqtroot,那么就会变成:
/opt/myqtroot/lib/cmake/Qt5/Qt5Config.cmake这种非常规安装,就需要设置变量 -DQt5_DIR=/opt/myqtroot/lib/cmake/Qt5
补充:亲 Unix 软件从源码安装的通用套路
Makefile 构建系统:
./configure --prefix=/usr --with-some-options # 生成 Makefile(这个 configure 脚本由 Autoconf 生成)
make -j 8 # 8 核心编译,生成 libtest.so
sudo make install # 安装,拷贝到 /usr/lib/libtest.so
CMake 构建系统:
cmake -B build -DCMAKE_INSTALL_PREFIX=/usr -DWITH_SOME_OPTIONS=ON # 生成 Makefile
cmake --build build --parallel 8 # 8 核心编译,生成 libtest.so
sudo cmake --build build --target install # 安装,拷贝到 /usr/lib/libtest.so注:如果 -DCMAKE_INSTALL_PREFIX=/usr/local 则会拷贝到 /usr/local/lib/libtest.so
5.如果第三方库发懒,没有提供 Config 文件怎么办?
绝大多数常用 C++ 库都提供了 CMake 支持(即使他们本身不一定是用 CMake 构建的)
/usr/lib/cmake/Boost-1.80.0/BoostConfig.cmake
/usr/lib/cmake/opencv4/OpenCVConfig.cmake
/usr/lib/cmake/Qt5/Qt5Config.cmake这些 Config 文件都是由第三方库负责安装到 /usr/lib/cmake。
也有少数不听话的库,官方不提供 CMake 支持,即安装时不自带 Config 文件。
- 例如 Python,CUDA,Jemalloc。
- 为了不影响 CMake 用户体验,CMake 发明了 Find 文件(FindXXX.cmake),Find 文件会在 CMake 安装时负责安装到 /usr/share/cmake/Modules
- 包搜索文件可以在不知道包具体位置信息的情况下搜索他们(在 /usr/lib 等默认路径搜索)
- eg:这些都是 CMake 自带的包搜索文件:
/usr/share/cmake/Modules/FindCUDAToolkit.cmake
/usr/share/cmake/Modules/FindPython.cmake
那么如果有个不太热门的第三方库没提供包配置文件,CMake 也没提供包搜索文件,我们该如何找到他?
- 这就需要自己提供包搜索文件了!别担心,你不用自己写,GitHub 上有很多志士仁人已经写过了对应的包搜索文件,你搜一下 FindXXX.cmake 就能找到了。
- eg:OpenVDB中的FindJemalloc.cmake
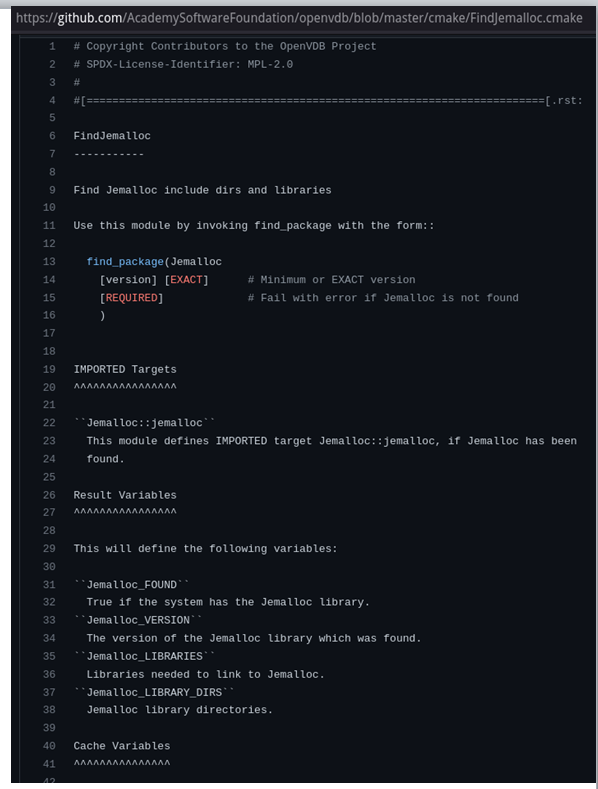
虽然 Config 文件通常风格比较统一,都是 XXX::xxx 这种格式。但是不同的 Find 文件,特别是这种网上志士仁人自己编写的文件,风格可能千差万别(没办法,毕竟不是官方的支持嘛),很多都还是古代 CMake 的用法,例如 ${XXX_LIBRARIES}。
- 关于具体使用的细节可以打开 FindXXX.cmake 文件查看,他里面前半部分是注释,会讲解如何使用。
- 现在你下载这个文件,放到 cmake/FindXXX.cmake。然后在你的 CMakeLists.txt 里最上面写一行:
set(CMAKE_MODULE_PATH "${CMAKE_CURRENT_LIST_DIR}/cmake;${CMAKE_MODULE_PATH}")
这样你之后的 find_package(XXX) 就会用你下载的这个 FindXXX.cmake 去找包了。
补充:自己编写一个FindXXX.cmake
CMAKE 编写 FindXXX.cmake
6.现代CMake的find_package VS 古代CMake的find_package
OpenCVConfig.cmake(现代)
FindCURL.cmake(古代)
参考:
Cmake之深入理解find_package()的用法
不管是 Find 类还是 Config 类,一定要打开相应的 cmake 文件看看注释,才能确定他是古代风格还是现代风格。
- 古代 CMake 的命名规范高度不统一,有的是 ${XXX_LIBRARIES},有的又是 ${XXX_LIBRARY} 非常沙雕,需要看相应 cmake 文件的注释,才能确定具体是怎么命名的。
- 现代 CMake 就好多了,统一用 包名::组件名 的格式。但是具体的组件名,还是要查看 cmake 文件中的注释才能确定。例如 CURL::libcurl OpenCV::core Qt5::core TBB::tbb 等
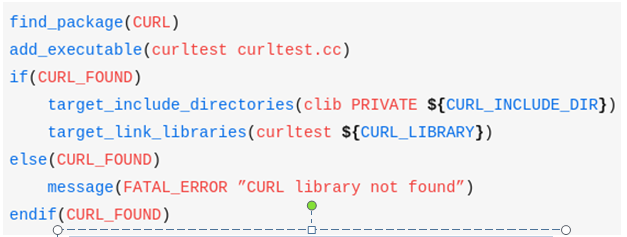
古代
find_package(XXX)
if (NOT XXX_FOUND)message(FATAL_ERROR “XXX not found”)
endif()
target_include_directories(yourapp ${XXX_INCLUDE_DIRS})
target_link_libraries(yourapp ${XXX_LIBRARIES})
现代
find_package(XXX REQUIRED COMPONENTS xxx)
target_link_libraries(yourapp XXX::xxx)
- eg:大多现代的 Find/Config 文件,都同时兼容现代和古代的用法。例如右图是 FindCURL.cmake 的注释(CMake会自己安装)
- Cmake支持的所有cmake-modules(7)
可以看到 IMPORTED Targets 章节是在介绍现代的用法,而 Result Variables 章节是在介绍古代的用法,我们尽量用现代的那种就行。
find_package(CURL REQUIRED)结果:
wangji@DESKTOP-9TAUMH9:~/code/my_course/gittee_mycourese/xiaopenlaoshi/course/16/00$ cmake -B build
-- Found CURL: /usr/lib/x86_64-linux-gnu/libcurl.so (found version "7.81.0")
7.find_package 的两种模式
MODULE模式
- find_package(TBB MODULE REQUIRED)
只会寻找 FindTBB.cmake,搜索路径:
${CMAKE_MODULE_PATH}(默认为 /usr/share/cmake/Modules)CONFIG 模式
- find_package(TBB CONFIG REQUIRED)
只会寻找 TBBConfig.cmake,搜索路径:
${CMAKE_PREFIX_PATH}/lib/cmake/TBB(默认为 /usr/lib/cmake/TBB)
${TBB_DIR} 或 $ENV{TBB_DIR}
find_package(TBB REQUIRED)
不指定则两者都会尝试,先尝试 FindTBB.cmake,再尝试 TBBConfig.cmake。
8.关于 vcpkg 的坑
比如 Jemalloc,他不提供 Config 文件,需要我们自己手写(或抄别人开源项目里的)个 Find 文件,用起来很不方便。
-
但是 vcpkg 会为所有第三方库,即使是懒惰的 Jemalloc,都配备一个 Config 文件方便你 find_package 导入。所以用 vcpkg 时,尽量用 find_package(XXX CONFIG REQUIRED) 避免被 CMake 自带的 Find 文件误导找到别的地方(而非 vcpkg 安装的那个)的库。
-
另外注意 vcpkg 需要的 CMAKE_TOOLCHAIN_FILE 如果你用 set 设置,必须在 project 命令前面,并且修改这个变量后要删除 build 目录重新 cmake -B build 一遍才能生效(否则会在旧的环境里找,找不到 vcpkg 装的库
9.语义版本号(semantic versioning)系统
软件行业记录版本迭代普遍采用的是一套所谓的语义版本号系统,英文简称 semver。
通常他的格式是三个用点分隔开来的十进制数字:<major>.<minor>.<patch>
-
例如:1.2.0,0.6.8,18.11.0
major 称为主版本号,出现功能重大变更,以至于和旧 API 不兼容的时候会增加该号。
minor 称为次版本号,功能有所变更或增加,但依然和旧的 API 兼容时会增加该号。
patch 称为补丁版号,功能没有改变,只是修复了一些 bug 就重新发布时会增加该号。 -
也有的软件不拘一格(例如我们的 zeno),索性用发布的日期作为版本号的三个数字,例如 2022.11.2。不论采用哪种编号方案,都是几个用点分开的数字,并且数字越大越新,且优先比较靠前面的数字。因此为了通用,CMake 支持最多四个点分开的版本号:
<major>.<minor>.<patch>.<tweak>。
并且如果你写 0.6.8 他会自动帮你把多余的 tweak 默认为 0,
也就是说 0.6.8 == 0.6.8.0
1.2 == 1.2.0 == 1.2.0.0。
project(CppCMakeDemo LANGUAGES CXX VERSION 1.2.3)
message("www: ${CppCMakeDemo_VERSION}, ${CMAKE_PROJECT_VERSION}")比较版本号时,可以用 if (${XXX_VERSION} VERSION_LESS 3.1.0) 判断大小
或者if (CppCMakeDemo_VERSION VERSION_LESS 3.1.0)
10.find_package 命令指定版本
-
find_package(OpenCV REQUIRED)
查找名为 OpenCV 的包,不限版本,事后可以通过 ${OpenCV_VERSION} 查询找到的版本。 -
find_package(OpenCV 2.0.1 REQUIRED)
查找版本在 2.0.1 以上的 OpenCV 包(version >= 2.0.1)。 -
find_package(OpenCV 2.0.1 EXACT REQUIRED)
查找版本刚好为 2.0.1 的 OpenCV 包(version == 2.0.1)。
如果没写全,则没写的部分默认为 0。例如下列三者等价:
find_package(OpenCV 2 REQUIRED)
find_package(OpenCV 2.0 REQUIRED)
find_package(OpenCV 2.0.0 REQUIRED)
11.使用非标准路径库总结
安装 TBB:
cd tbb
./configure --prefix=/opt/tbbinstalldir
make -j 8
sudo make install
在你的项目里使用 TBB:
cd yourapp
cmake -B build -DTBB_DIR=/opt/tbbinstalldir/lib/cmake/TBB
cmake --build build --parallel 8
CMakeLists.txt 这样写:
project(yourapp)
add_executable(yourapp yourmain.cpp)
find_package(TBB CONFIG REQUIRED COMPONENTS tbb)
target_link_libraries(yourapp PUBLIC TBB::tbb)
其他
1.变量,函数,类与extern
由于函数和类的定义和声明可以用{}区分,所以C语言开发者偷懒,就省略了extern,其实加上extern更好。
//声明
extern in a;
int f();
struct C{};//extern "C"是绑定在一起的关键字
extern "C" int cf();//定义
int a;
int f() {
return 0;
};
struct C{};
extern "C" int cf()
{return 0;}2.#include <biology/Carer.h>和#include "biology/Carer.h"区别
#include <biology/Carer.h>符合Cmake规范,不会搜索当前目录,只会搜索CMakeList里面指定的目录:target_include_directories(biology PUBLIC include);
#include "biology/Carer.h"努夫和Cmake规范,会搜索当前目录,target_include_directories(biology PUBLIC include);也会起作用;
参考:
- parallel101/course