文章目录
- 一、坐标系定义
- 1.东北天坐标系(ENU)
- 2.北东地坐标系(NED)
- 二、在ENU坐标系向量变换到NED坐标系向量
- 三、将载体相对ENU的姿态和位置,变换为载体相对NED的姿态和位置
- 1、外旋和内旋
- 2、各个轴旋转矩阵
- 3、ENU和右前上载体坐标系的姿态
- 3、NED和前右下载体坐标系的姿态
- 3、转换
一、坐标系定义
1.东北天坐标系(ENU)
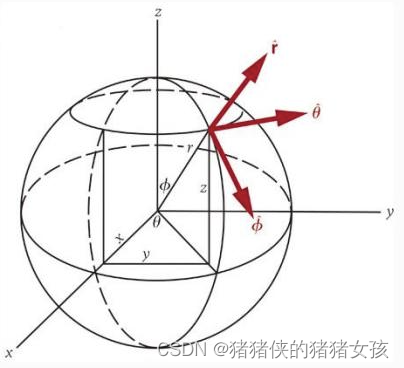
1)x轴指向东, y轴指向北, z轴指向天
2)绕x轴转动,称为pitch角
绕y轴转动,称为roll角
绕z轴转动,成为yaw角
注意:这里和常规定义不太一样,主要是为了配合保证前向角是roll角。如果你不想这么定义,后续的旋转矩阵和旋转顺序进行一个改变。
3)对应的IMU载体坐标系是右前上
4)欧拉角旋转顺序:z-x-y
2.北东地坐标系(NED)
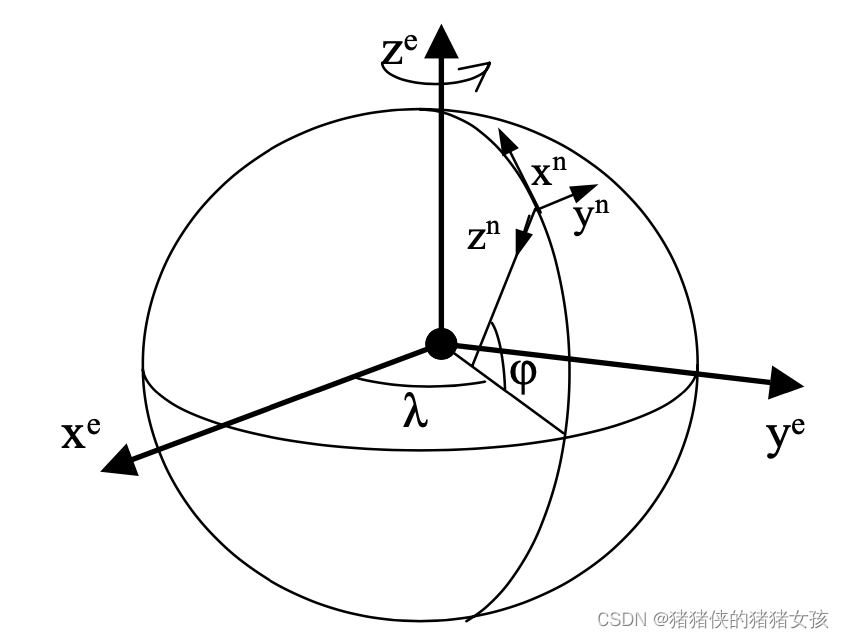
1)x轴指向北, y轴指向东, z轴指向地
2)绕x轴转动,称为roll角
绕y轴转动,称为pitch角
绕z轴转动,成为yaw角
3)对应的IMU载体坐标系是前右下
4)欧拉角旋转顺序:z-y-x
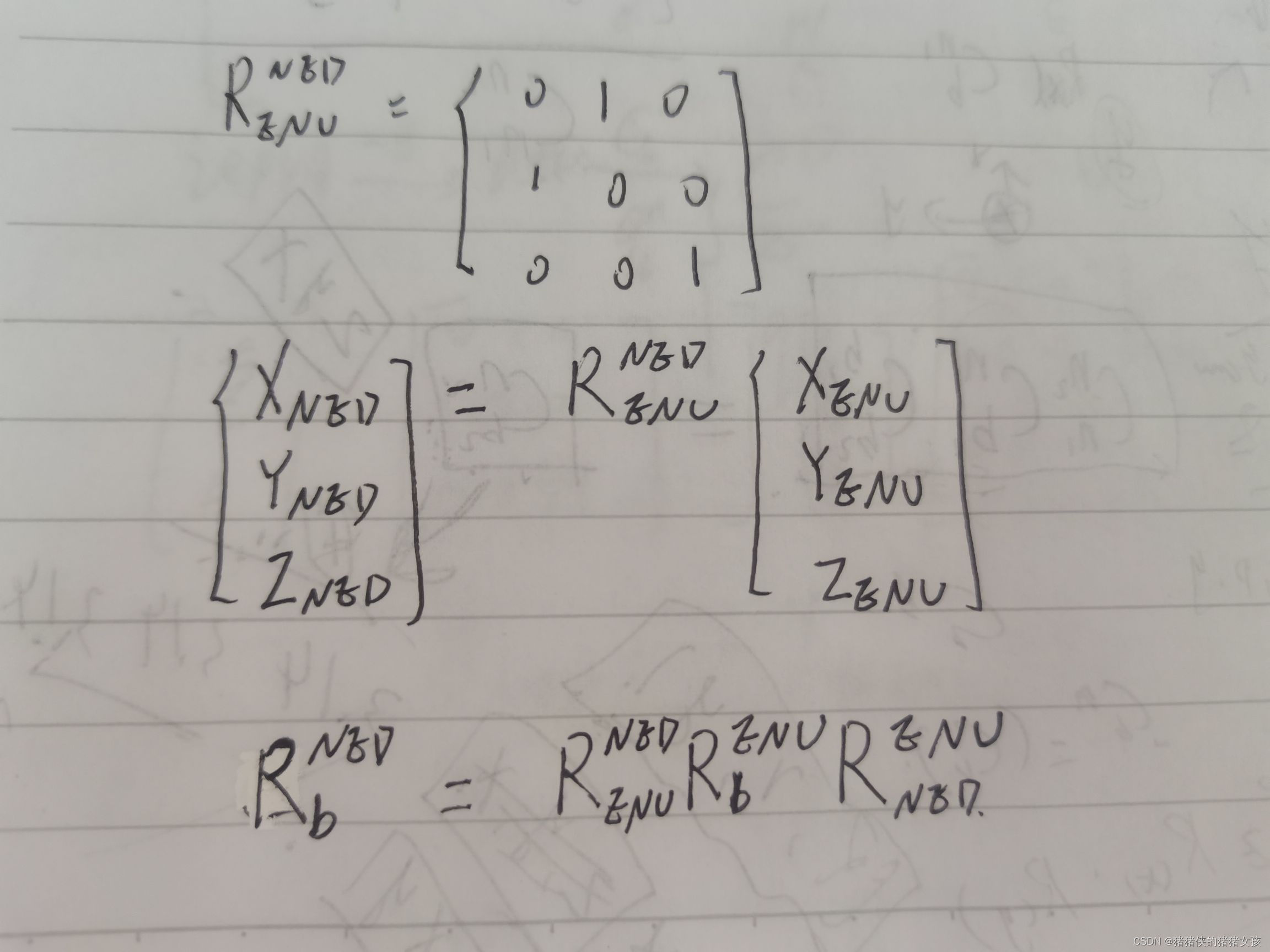
二、在ENU坐标系向量变换到NED坐标系向量
从坐标系定义中,可以看出,ENU和NED的坐标变换关系是:
X(ENU) = Y(NED)
Y(ENU) = X(NED)
Z(ENU) = -Z(NED)
Yaw(ENU) = -Yaw(NED)+ 90
注意:虽然ENU和NED旋转顺序不同,但是都是根据yaw-pitch-roll顺序进行旋转的。
三、将载体相对ENU的姿态和位置,变换为载体相对NED的姿态和位置
1、外旋和内旋
旋转轴分绕固定坐标系旋转和绕动坐标系旋转,前者称为外旋,后者称为内旋。 - Fixed Angles 外旋 - Euler Angles 内旋
1)外旋(Fixed Angles)
外旋为绕静止坐标系旋转,也就是每次旋转都绕参考的静止坐标系进行三轴旋转。外旋为旋转矩阵按照先后依次左乘。
2)内旋(Euler Angles)
外旋为动坐标系旋转,也就是每次旋转后绕变化后的坐标系进行三轴旋转。内旋为旋转矩阵按照先后依次右乘。
在外旋和内旋中有一个特性很重要,这里先提一下:X-Y-Z的外旋等价于Z-Y-X内旋
2、各个轴旋转矩阵
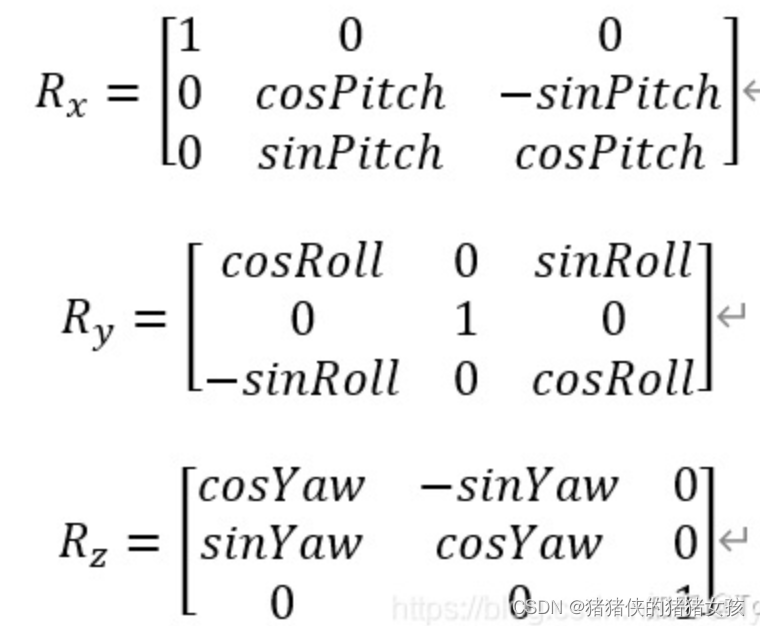
默认情况下的旋转,参考系为n系(ENU,或者NED),载体系为b系,旋转的时候,参考系不动,载体系进行旋转
3、ENU和右前上载体坐标系的姿态
参考系(导航系):(ENU)东北天
载体系(机体系):(XYZ)右前上
旋转顺序:Z-X-Y
姿态顺序:(Yaw-Pitch-Roll)偏航-俯仰-横滚
旋转轴:内旋
要计算内旋的Z-X-Y,我们只需要计算外旋的Y-X-Z即可,也就是计算出ENU_Y-X-Z_Fixed_Angles:
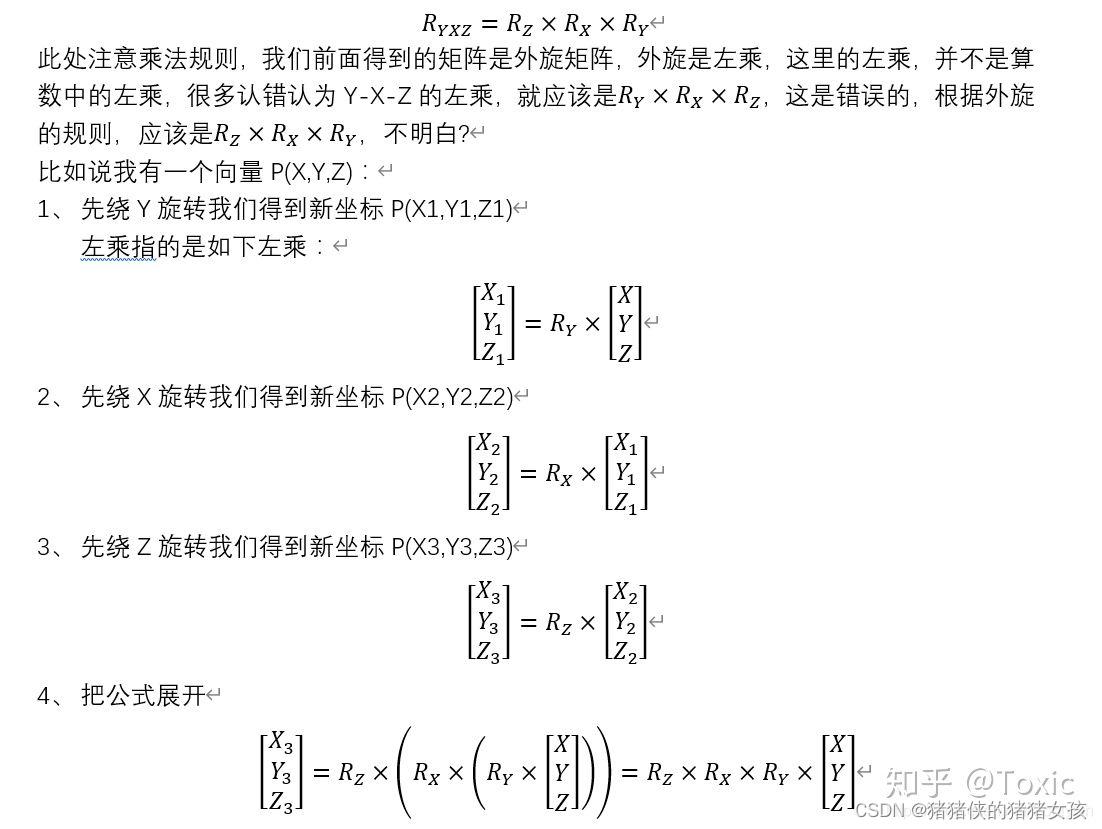
但是内旋的右乘就是从左到右乘了,从这里也可以看出左乘的Y-X-Z等于右乘的Z-X-Y了。
下面的旋转矩阵是从载体系到参考系的旋转矩阵R_b2n,左上角标有F表示是外旋下的DCM:
注意:内旋是按照旋转顺序右乘,外旋是按照旋转顺序左乘,所以内旋的Z-X-Y等于外旋的Y-X-Z。

根据外旋内旋规则那么得到内旋的旋转矩阵R_b2n:从载体系到参考系:

求转置可得到从参考系到载体系的旋转矩阵:

3、NED和前右下载体坐标系的姿态
参考系(导航系):(NED)北东地
载体系(机体系):(XYZ)前右下
旋转顺序:Z-Y-X
姿态顺序:(Yaw-Pitch-Roll)偏航-俯仰-横滚
旋转轴:内旋 前面我们说了,旋转矩阵和坐标系无关,所以NED下的ZYX和ENU下的ZYX是一样的哦,唯一不同的就是,姿态的命名和正负方向不一样了,绕X轴变成了横滚,绕Y轴变成了俯仰,Z轴还是偏航。

这个旋转矩阵是从载体系到参考系:

求转置可得到从参考系到载体系的旋转矩阵:

注意:
我们说的姿态角是载体相对参考坐标系的旋转欧拉角
3、转换
参考:
https://zhuanlan.zhihu.com/p/336357646