本文主要内容如下:
- 1. 最速下降法
- 2. 抛物型多元二次函数优化问题的步长选取
- 3. 抛物型多元二次函数等值线/面的几何分析
- 4. 基于最速下降法的 “变步长Richardson 迭代法” 的收敛性分析
1. 最速下降法
数值求解极小值问题的基本思想在于从给定的初始点 x ⃗ 0 \vec{x}_0 x0 出发,沿某一搜索方向 d ⃗ 0 \vec{d}_0 d0 进行搜索,同时通过确定最佳步长 α 0 \alpha_0 α0 使函数值沿该搜索方向下降最大。依此方式不断进行,形成函数值下降的迭代算法,即:
x ⃗ k + 1 = x ⃗ k + α k d ⃗ k ( k = 0 , 1 , 2 , … ) f ( x ⃗ k + 1 ) < f ( x ⃗ k ) \vec{x}_{k+1}=\vec{x}_k+\alpha_k\vec{d}_k\ (k=0,1,2,\dots)\\\ \\ f(\vec{x}_{k+1})<f(\vec{x}_k) xk+1=xk+αkdk (k=0,1,2,…) f(xk+1)<f(xk)
对于任意的 n n n 元函数 f ( x ⃗ ) ( x ⃗ ∈ R n ) f(\vec{x})\ (\vec{x}\in\mathbb{R}^n) f(x) (x∈Rn) 的方向导数(反映函数在当前位置沿任意方向的变化快慢):
d f ( x ⃗ ) d r ⃗ ∣ x ⃗ = x ⃗ 0 = lim Δ r → 0 f ( x 1 + Δ x 1 , x 2 + Δ x 2 , … , x n + Δ x n ) − f ( x 1 , … , x n ) Δ r = g r a d ( f ) ∣ x ⃗ = x ⃗ 0 ⋅ r ⃗ \begin{aligned} &\left.\dfrac{df(\vec{x})}{d\vec{r}}\right|_{\vec{x}=\vec{x}_0}=\lim_{\Delta r\rightarrow0}\dfrac{f(x_1+\Delta x_1,x_2+\Delta x_2,\dots,x_n+\Delta x_n)-f(x_1,\dots,x_n)}{\Delta r}\\\\ &\qquad\qquad\quad=\left.grad(f)\right|_{\vec{x}=\vec{x}_0}\cdot\vec{r} \end{aligned} drdf(x)∣ ∣x=x0=Δr→0limΔrf(x1+Δx1,x2+Δx2,…,xn+Δxn)−f(x1,…,xn)=grad(f)∣x=x0⋅r
其中, r ⃗ = 1 Δ r [ Δ x 1 , Δ x 2 , … , Δ x n ] \vec{r}=\dfrac{1}{\Delta r}\begin{bmatrix}\Delta x_1,\Delta x_2,\dots,\Delta x_n\end{bmatrix} r=Δr1[Δx1,Δx2,…,Δxn] 为任意单位方向, Δ r = Δ x 1 2 + ⋯ + Δ x n 2 \Delta r=\sqrt{\Delta x_1^2+\dots+\Delta x_n^2} Δr=Δx12+⋯+Δxn2,
上式说明:函数的负梯度方向是函数值在该点下降最快的方向。 因此,很容易想到利用负梯度作为搜索方向,这便是为何将其称为最速下降法(Steepest Descent)或梯度法,即
x ⃗ k + 1 = x ⃗ k − α k ▽ f ( x ⃗ k ) ( k = 0 , 1 , 2 , … ) \vec{x}_{k+1}=\vec{x}_k-\alpha_k\bigtriangledown f(\vec{x}_k)\ (k=0,1,2,\dots) xk+1=xk−αk▽f(xk) (k=0,1,2,…)
搜索方向确定后,步长还有待确定。我们希望函数沿着搜索方向上能够“前进”到该方向上的极小值,如图所示:

换而言之,每步搜寻所采取的最佳步长 α \alpha α 的确定是通过在搜索方向上进行一维极小值问题的求解 (试探法,插值法…) 获得,即
min α f [ x ⃗ k − α ▽ f ( x ⃗ k ) ] = min α ϕ ( α ) \min_{\alpha}f[\vec{x}_k-\alpha\bigtriangledown f(\vec{x}_k)]=\min_{\alpha}\phi(\alpha) αminf[xk−α▽f(xk)]=αminϕ(α)
根据一元极值问题的必要条件:
ϕ ′ ( α ) = − { ▽ f [ x ⃗ k − α ▽ f ( x ⃗ k ) ] } T ⋅ [ ▽ f ( x ⃗ k ) ] = − [ ▽ f ( x ⃗ k + 1 ) ] T ⋅ [ ▽ f ( x ⃗ k ) ] = 0 \phi'(\alpha)=-\{\bigtriangledown f[\vec{x}_k-\alpha\bigtriangledown f(\vec{x}_k)]\}^T\cdot[\bigtriangledown f(\vec{x}_k)]=-[\bigtriangledown f(\vec{x}_{k+1})]^T\cdot[\bigtriangledown f(\vec{x}_k)]=0 ϕ′(α)=−{▽f[xk−α▽f(xk)]}T⋅[▽f(xk)]=−[▽f(xk+1)]T⋅[▽f(xk)]=0
这说明了在最速下降法中, 相邻两个迭代点上的函数梯度相互垂直,即相邻两个搜索方向互相垂直 ,形成“之”字形的直齿锯齿现象。

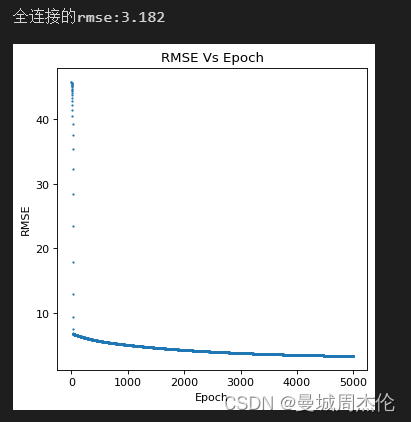
由于锯齿现象,当迭代点接近极小点时,搜索的步长变得越来越小,因而收敛速度减慢,这种情况似乎与“最速下降”的名称相矛盾,这主要是因为梯度是函数的局部性质 (从局部上看,在一点附近函数的下降是快的),但从整体上看则走了许多弯路,函数的下降并不算快。不过最速下降法最初的几步往往可以下降的较快。
2. 抛物型多元二次函数优化问题的步长选取
对于抛物型多元二次函数:
g ( x ⃗ ) = 1 2 x ⃗ T A x ⃗ − b ⃗ T x ⃗ + c ( A ∈ S P D ; c ∈ R ) g(\vec{x})=\frac{1}{2}\vec{x}^T\bold{A}\vec{x}-\vec{b}^T\vec{x}+c(\bold A\in SPD;c\in\mathbb{R}) g(x)=21xTAx−bTx+c(A∈SPD;c∈R)
若采用最速下降法求解其最小值:
-
搜索方向:
− ▽ g = − A x ⃗ k + b ⃗ = r ⃗ k -\bigtriangledown g=-\bold{A}\vec{x}_k+\vec{b}=\vec{r}_k −▽g=−Axk+b=rk
其中, r ⃗ k \vec{r}_k rk 为迭代法求解线性方程组 A x ⃗ = b ⃗ \bold A \vec{x}=\vec{b} Ax=b 第 k k k 步的残差。 -
搜索路径:
x ⃗ k + 1 = x ⃗ k + α k r ⃗ k r ⃗ k + 1 T ⋅ r ⃗ k = 0 \vec{x}_{k+1}=\vec{x}_k+\alpha_{k}\vec{r}_k\\\ \\ \vec{r}_{k+1}^{\ T}\cdot\vec{r}_k=0 xk+1=xk+αkrk rk+1 T⋅rk=0
对于这种情况,在求解最佳步长时,可以不用在搜索方向上进行一维搜索的数值计算,可以通过理论的方式直接推导出 α k \alpha_{k} αk 的计算表达式:
α k = r ⃗ k T ⋅ r ⃗ k r ⃗ k T ⋅ A ⋅ r ⃗ k \alpha_{k}=\dfrac{\vec{r}_k^{\ T}\cdot\vec{r}_k}{\vec{r}_k^{\ T}\cdot\bold{A}\cdot\vec{r}_k} αk=rk T⋅A⋅rkrk T⋅rk
证明:
0 = r ⃗ k + 1 T ⋅ r ⃗ k = ( b ⃗ − A ⋅ x ⃗ k + 1 ) T ⋅ r ⃗ k = [ b ⃗ − A ⋅ ( x ⃗ k + α k r ⃗ k ) ] T ⋅ r ⃗ k = [ ( b ⃗ − A ⋅ x ⃗ k ) − α k A ⋅ r ⃗ k ) ] T ⋅ r ⃗ k = r ⃗ k T ⋅ r ⃗ k − α k r ⃗ k T ⋅ A ⋅ r ⃗ k \begin{aligned} &0=\vec{r}_{k+1}^{\ T}\cdot\vec{r}_k\\\\ &\ \ =(\vec{b}-\bold{A}\cdot\vec{x}_{k+1})^{\ T}\cdot\vec{r}_k\\\\ &\ \ =[\vec{b}-\bold{A}\cdot(\vec{x}_k+\alpha_{k}\vec{r}_k)]^{\ T}\cdot\vec{r}_k\\\\ &\ \ =[(\vec{b}-\bold{A}\cdot\vec{x}_k)-\alpha_{k}\bold{A}\cdot\vec{r}_k)]^{\ T}\cdot\vec{r}_k\\\\ &\ \ =\vec{r}_k^{\ T}\cdot\vec{r}_k-\alpha_{k}\vec{r}_k^{\ T}\cdot\bold{A}\cdot\vec{r}_k\\\\ \end{aligned} 0=rk+1 T⋅rk =(b−A⋅xk+1) T⋅rk =[b−A⋅(xk+αkrk)] T⋅rk =[(b−A⋅xk)−αkA⋅rk)] T⋅rk =rk T⋅rk−αkrk T⋅A⋅rk
故,
α k = r ⃗ k T ⋅ r ⃗ k r ⃗ k T ⋅ A ⋅ r ⃗ k ( ∗ ) \alpha_{k}=\dfrac{\vec{r}_k^{\ T}\cdot\vec{r}_k}{\vec{r}_k^{\ T}\cdot\bold{A}\cdot\vec{r}_k}\quad(*) αk=rk T⋅A⋅rkrk T⋅rk(∗)
综上所述,上述多元二次函数的优化问题的求解格式为:
-
r ⃗ k = b ⃗ − A ⋅ x ⃗ k \vec{r}_k=\vec{b}-\bold{A}\cdot\vec{x}_k rk=b−A⋅xk
-
x ⃗ k + 1 = x ⃗ k + r ⃗ k T ⋅ r ⃗ k r ⃗ k T ⋅ A ⋅ r ⃗ k r ⃗ k \vec{x}_{k+1}=\vec{x}_k+\dfrac{\vec{r}_k^{\ T}\cdot\vec{r}_k}{\vec{r}_k^{\ T}\cdot\bold{A}\cdot\vec{r}_k}\vec{r}_k xk+1=xk+rk T⋅A⋅rkrk T⋅rkrk
其中, k = 0 , 1 , 2 , 3 … k=0,1,2,3\dots k=0,1,2,3…
最后指出,上述求解格式也可用于求解非多元二次函数的其他函数的优化问题,这是因为,根据多元泰勒展开式:
f ( x ⃗ ) = f ( x ⃗ 0 ) + ▽ [ f ( x ⃗ 0 ) ] T ⋅ ( x ⃗ − x ⃗ 0 ) + 1 2 ( x ⃗ − x ⃗ 0 ) T ⋅ H ( x ⃗ 0 ) ⋅ ( x ⃗ − x ⃗ 0 ) + … f(\vec{x})=f(\vec{x}_0)+\bigtriangledown[f(\vec{x}_0)]^T\cdot(\vec{x}-\vec{x}_0)+\frac{1}{2}(\vec{x}-\vec{x}_0)^T\cdot\bold{H}(\vec{x}_0)\cdot(\vec{x}-\vec{x}_0)+\dots f(x)=f(x0)+▽[f(x0)]T⋅(x−x0)+21(x−x0)T⋅H(x0)⋅(x−x0)+…
其中,海塞矩阵
H ( x ⃗ 0 ) = [ ∂ 2 f ∂ x 1 2 ∂ 2 f ∂ x 1 ∂ x 2 … ∂ 2 f ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ∂ x 2 2 … ∂ 2 f ∂ x 2 ∂ x n ⋮ ⋮ ⋮ ∂ 2 f ∂ x n ∂ x 1 ∂ 2 f ∂ x n ∂ x 2 … ∂ 2 f ∂ x n 2 ] \bold{H}(\vec{x}_0)= \begin{bmatrix} \dfrac{\partial^2f}{\partial x_1^2} & \dfrac{\partial^2f}{\partial x_1\partial x_2} & \dots & \dfrac{\partial^2f}{\partial x_1\partial x_n}\\\\ \dfrac{\partial^2f}{\partial x_2\partial x_1} & \dfrac{\partial^2f}{\partial x_2^2} & \dots & \dfrac{\partial^2f}{\partial x_2\partial x_n}\\\\ \vdots &\vdots & &\vdots\\\\ \dfrac{\partial^2f}{\partial x_n\partial x_1} & \dfrac{\partial^2f}{\partial x_n\partial x_2} & \dots & \dfrac{\partial^2f}{\partial x_n^2} \end{bmatrix} H(x0)=⎣ ⎡∂x12∂2f∂x2∂x1∂2f⋮∂xn∂x1∂2f∂x1∂x2∂2f∂x22∂2f⋮∂xn∂x2∂2f………∂x1∂xn∂2f∂x2∂xn∂2f⋮∂xn2∂2f⎦ ⎤
这说明在局部上,函数均可通过二次函数进行近似,即
{ A ≈ H ( x ⃗ 0 ) b ⃗ ≈ ▽ [ f ( x ⃗ 0 ) ] c ≈ f ( x ⃗ 0 ) \begin{cases} \bold A\approx \bold{H}(\vec{x}_0)\\\\ \vec{b}\approx \bigtriangledown[f(\vec{x}_0)]\\\\ c\approx f(\vec{x}_0) \end{cases} ⎩ ⎨ ⎧A≈H(x0)b≈▽[f(x0)]c≈f(x0)
3. 抛物型多元二次函数等值线/面的几何分析
前述抛物型多元二次函数的等值线、等值面方程为:
1 2 x ⃗ T A x ⃗ − b ⃗ T x ⃗ + c = β , ( A 为正定 / 负定对称矩阵, β ∈ [ min f , max f ] ) \dfrac{1}{2}\vec{x}^T\bold A\vec{x}-\vec{b}^{\ T}\vec{x}+c=\beta,\ (A为正定/负定对称矩阵,\beta\in[\min{f},\max{f}]) 21xTAx−b Tx+c=β, (A为正定/负定对称矩阵,β∈[minf,maxf])
将上述一般形式转变为标准形式:
-
平移变换: x ⃗ = y ⃗ + x ⃗ 0 \vec{x}=\vec{y}+\vec{x}_0\quad x=y+x0(其中, x ⃗ 0 \vec{x}_0 x0 为待定的常向量)
1 2 x ⃗ T A x ⃗ − b ⃗ T x ⃗ + c = 1 2 ( y ⃗ + x ⃗ 0 ) T A ( y ⃗ + x ⃗ 0 ) − b ⃗ T ( y ⃗ + x ⃗ 0 ) + c = 1 2 y ⃗ T A y ⃗ + y ⃗ T ( A x ⃗ 0 − b ⃗ ) + 1 2 x ⃗ 0 T A x ⃗ 0 − b ⃗ T x ⃗ 0 + c ( 令 x ⃗ 0 = A − 1 b ⃗ ) = 1 2 y ⃗ T A y ⃗ − 1 2 b ⃗ T A − 1 b ⃗ + c = β \begin{aligned} &\quad\dfrac{1}{2}\vec{x}^T\bold A\vec{x}-\vec{b}^{\ T}\vec{x}+c\\\\ &=\dfrac{1}{2}(\vec{y}+\vec{x}_0)^T\bold A(\vec{y}+\vec{x}_0)-\vec{b}^{\ T}(\vec{y}+\vec{x}_0)+c\\\\ &=\dfrac{1}{2}\vec{y}^{\ T}\bold A\vec{y}+\vec{y}^{\ T}(\bold A \vec{x}_0-\vec{b})+\dfrac{1}{2}\vec{x}_0^{\ T}\bold A\vec{x}_0-\vec{b}^{\ T}\vec{x}_0+c\ (令\ \vec{x}_0=\bold A^{-1}\vec{b})\\\\ &=\dfrac{1}{2}\vec{y}^{\ T}\bold A\vec{y}-\dfrac{1}{2}\vec{b}^{\ T}\bold A^{-1}\vec{b}+c=\beta\\\\ \end{aligned} 21xTAx−b Tx+c=21(y+x0)TA(y+x0)−b T(y+x0)+c=21y TAy+y T(Ax0−b)+21x0 TAx0−b Tx0+c (令 x0=A−1b)=21y TAy−21b TA−1b+c=β -
旋转操作: y ⃗ = Q z ⃗ , Q T A Q = D \vec{y}=\bold{Q}\vec{z},\bold{Q^TAQ=D} y=Qz,QTAQ=D (正交合同),其中, A \bold A A的特征对为 u ⃗ i − λ i A \vec{u}_i-\lambda^A_i ui−λiA
Q = [ u ⃗ 1 u ⃗ 2 … u ⃗ n ] D = [ λ 1 A λ 2 A ⋱ λ n A ] \begin{aligned} &\bold Q=\begin{bmatrix}\vec{u}_1&\vec{u}_2&\dots&\vec{u}_n\end{bmatrix}\\\ \\ &\bold D=\begin{bmatrix}\lambda^A_1\\\\&&\lambda^A_2\\\\&&&\ddots\\\\&&&&\lambda^A_n \end{bmatrix} \end{aligned} Q=[u1u2…un]D=⎣ ⎡λ1Aλ2A⋱λnA⎦ ⎤
则有:
1 2 x ⃗ T A x ⃗ − b ⃗ T x ⃗ + c = 1 2 y ⃗ T A y ⃗ − 1 2 b ⃗ T A − 1 b ⃗ + c = 1 2 z ⃗ T D z ⃗ − 1 2 b ⃗ T A − 1 b ⃗ + c = β \begin{aligned} &\quad\dfrac{1}{2}\vec{x}^T\bold A\vec{x}-\vec{b}^{\ T}\vec{x}+c\\\\ &=\dfrac{1}{2}\vec{y}^{\ T}\bold A\vec{y}-\dfrac{1}{2}\vec{b}^{\ T}\bold A^{-1}\vec{b}+c\\\\ &=\dfrac{1}{2}\vec{z}^{\ T}\bold D\vec{z}-\dfrac{1}{2}\vec{b}^{\ T}\bold A^{-1}\vec{b}+c=\beta\\\\ \end{aligned} 21xTAx−b Tx+c=21y TAy−21b TA−1b+c=21z TDz−21b TA−1b+c=β
记
z ⃗ T D z ⃗ = β − 2 c + b ⃗ T A − 1 b ⃗ ≜ α { > 0 ( A 为正定矩阵 ) < 0 ( A 为负定矩阵 ) \vec{z}^{\ T}\bold D\vec{z}=\beta-2c+\vec{b}^{\ T}\bold A^{-1}\vec{b}\triangleq\alpha \begin{cases} \ >0\ (A为正定矩阵)\\\\ \ <0\ (A为负定矩阵) \end{cases} z TDz=β−2c+b TA−1b≜α⎩ ⎨ ⎧ >0 (A为正定矩阵) <0 (A为负定矩阵)
则
z ⃗ T D z ⃗ = α ⟹ z 1 2 α λ 1 A + z 2 2 α λ 2 A + ⋯ + z n 2 α λ n A = 1 \vec{z}^{\ T}\bold D\vec{z}=\alpha\Longrightarrow \dfrac{z_1^2}{\dfrac{\alpha}{\lambda^A_1}}+\dfrac{z_2^2}{\dfrac{\alpha}{\lambda^A_2}}+\dots+\dfrac{z_n^2}{\dfrac{\alpha}{\lambda^A_n}}=1 z TDz=α⟹λ1Aαz12+λ2Aαz22+⋯+λnAαzn2=1
其中,
z ⃗ = Q T ( x ⃗ − A − 1 b ⃗ ) \vec{z}=\bold{Q}^T(\vec{x}-\bold A^{-1}\vec{b}) z=QT(x−A−1b)
通过标准型可以较容易地知道“椭圆“ 的相关信息: -
k k k 轴所在直线的一般方程(面的交线)为:
z i = 0 ( i = 1 , 2 , … , n 且 i ≠ k ) z_i=0\ (i=1,2,\dots,n且i\ne k) zi=0 (i=1,2,…,n且i=k)
k k k 轴对应的单位方向与 z i = 0 ( i = 1 , 2 , … , n 且 i ≠ k ) z_i=0\ (i=1,2,\dots,n且i\ne k) zi=0 (i=1,2,…,n且i=k) 定义的 n − 1 n-1 n−1 个平面的法线 u ⃗ i ( i = 1 , 2 , … , n 且 i ≠ k ) \vec{u}_i\ (i=1,2,\dots,n且i\ne k) ui (i=1,2,…,n且i=k) 正交,这说明 k k k轴所在方向即为特征向量 u ⃗ k \vec{u}_k uk 所在的方向。并且轴线方向不因等值面 β \beta β 的不同而改变,即所有椭圆等值面的轴具有相同的方向且同心,这意味着倘若初始点任意选择,并不再选择负梯度方向作为搜索方向,而选择 A \bold A A 的特征方向作为搜索方向(即平行于各轴进行搜索),那么至多 n 步便能寻得最小值。

-
各个半轴长为:
a i = α λ i A a_i=\sqrt{\dfrac{\alpha}{\lambda^A_i}} ai=λiAα
即,某一特定的等值线,特征值越大的方向,椭圆越扁平
另外,梯度沿着等值线、等值面的外法线方向,那么轴线上的各点梯度便指向 ”椭圆“ 中心,说明:若初始点恰巧选择在 ”椭圆“ 的轴线,最速下降法仅一步便可以求得上述优化问题的解。
4. 基于最速下降法的 “变步长Richardson 迭代法” 的收敛性分析
求解线性方程组:
A x ⃗ = b ⃗ ( A ∈ S P D ) \bold A \vec{x}=\vec{b}\quad (\bold A\in SPD) Ax=b(A∈SPD)
等价于求解如下二次函数的极小值点:
g ( x ⃗ ) = 1 2 x ⃗ T A x ⃗ − b ⃗ T x ⃗ + c ( A ∈ S P D ) g(\vec{x})=\frac{1}{2}\vec{x}^T\bold{A}\vec{x}-\vec{b}^T\vec{x}+c\quad (\bold A\in SPD) g(x)=21xTAx−bTx+c(A∈SPD)
基于最速下降法可以得出 “变步长Richardson 迭代法”,即参数 α \alpha α 不再取为固定值,求解格式如下:
{ r ⃗ k = b ⃗ − A ⋅ x ⃗ k α k = r ⃗ k T ⋅ r ⃗ k r ⃗ k T ⋅ A ⋅ r ⃗ k x ⃗ k + 1 = x ⃗ k + α k r ⃗ k \begin{cases} \vec{r}_k=\vec{b}-\bold{A}\cdot\vec{x}_k\\\\ \alpha_k=\dfrac{\vec{r}_k^{\ T}\cdot\vec{r}_k}{\vec{r}_k^{\ T}\cdot\bold{A}\cdot\vec{r}_k}\\\\ \vec{x}_{k+1}=\vec{x}_k+\alpha_k\vec{r}_k \end{cases} ⎩ ⎨ ⎧rk=b−A⋅xkαk=rk T⋅A⋅rkrk T⋅rkxk+1=xk+αkrk
现对这种方法的收敛性及收敛速度进行分析:(方程组的精确解为 x ⃗ \vec{x} x)
令
E ( x ⃗ k ) ≜ 1 2 e ⃗ k T A e ⃗ k = 1 2 ( x k ⃗ − x ⃗ ) T A ( x k ⃗ − x ⃗ ) = g ( x ⃗ k ) + 1 2 x ⃗ T A x ⃗ \begin{aligned} E(\vec{x}_k)\triangleq\frac{1}{2}\vec{e}_k^T\bold A\vec{e}_k =\frac{1}{2}(\vec{x_k}-\vec{x})^T\bold A(\vec{x_k}-\vec{x}) =g(\vec{x}_k)+\frac{1}{2}\vec{x}^T\bold A\vec{x} \end{aligned} E(xk)≜21ekTAek=21(xk−x)TA(xk−x)=g(xk)+21xTAx
又
x ⃗ k + 1 = x ⃗ k + α k r ⃗ k ⟹ e ⃗ k + 1 = e ⃗ k + α k r ⃗ k r ⃗ k = b ⃗ − A x ⃗ k = A x ⃗ − A x ⃗ k = − A e ⃗ k ⟹ e ⃗ k = − A − 1 r ⃗ k \vec{x}_{k+1}=\vec{x}_k+\alpha_k\vec{r}_k \Longrightarrow \vec{e}_{k+1}=\vec{e}_k+\alpha_k\vec{r}_k\\\ \\ \vec{r}_k=\vec{b}-\bold A\vec{x}_k=\bold A\vec{x}-\bold A\vec{x}_k=-\bold A\vec{e}_k \Longrightarrow \vec{e}_k=-\bold A^{-1}\vec{r}_k xk+1=xk+αkrk⟹ek+1=ek+αkrk rk=b−Axk=Ax−Axk=−Aek⟹ek=−A−1rk
那么
E ( x ⃗ k ) − E ( x ⃗ k + 1 ) E ( x ⃗ k ) = e ⃗ k T A e ⃗ k − e ⃗ k + 1 T A e ⃗ k + 1 e ⃗ k T A e ⃗ k = e ⃗ k T A e ⃗ k − ( e ⃗ k + α k r ⃗ k ) T A ( e ⃗ k + α k r ⃗ k ) e ⃗ k T A e ⃗ k = − 2 α k r ⃗ k T A e ⃗ k − α k 2 r ⃗ k T A r ⃗ k e ⃗ k T A e ⃗ k = ( r ⃗ k T r ⃗ k ) 2 ( r ⃗ k T A r ⃗ k ) ( r ⃗ k T A − 1 r ⃗ k ) ≥ 4 λ m i n A λ m a x A ( λ m i n A + λ m a x A ) 2 ( K a n t o r v i c h 不等式) \begin{aligned} &\quad\dfrac{E(\vec{x}_k)-E(\vec{x}_{k+1})}{E(\vec{x}_k)}\\\\ &=\dfrac{\vec{e}_k^T\bold A\vec{e}_k-\vec{e}_{k+1}^T\bold A\vec{e}_{k+1}}{\vec{e}_k^T\bold A\vec{e}_k}\\\\ &=\dfrac{\vec{e}_k^T\bold A\vec{e}_k-(\vec{e}_k+\alpha_k\vec{r}_k)^T\bold A(\vec{e}_k+\alpha_k\vec{r}_k)}{\vec{e}_k^T\bold A\vec{e}_k}\\\\ &=\dfrac{-2\alpha_k\vec{r}_k^T\bold A\vec{e}_k-\alpha_k^2\vec{r}_k^T\bold A\vec{r}_k}{\vec{e}_k^T\bold A\vec{e}_k}\\\\ &=\dfrac{(\vec{r}_k^T\vec{r}_k)^2}{(\vec{r}_k^T\bold A\vec{r}_k)(\vec{r}_k^T\bold A^{-1}\vec{r}_k)}\\\\ &\ge\dfrac{4\lambda^A_{min}\lambda^A_{max}}{(\lambda^A_{min}+\lambda^A_{max})^2}(Kantorvich 不等式) \end{aligned} E(xk)E(xk)−E(xk+1)=ekTAekekTAek−ek+1TAek+1=ekTAekekTAek−(ek+αkrk)TA(ek+αkrk)=ekTAek−2αkrkTAek−αk2rkTArk=(rkTArk)(rkTA−1rk)(rkTrk)2≥(λminA+λmaxA)24λminAλmaxA(Kantorvich不等式)
从而有:
E ( x ⃗ k + 1 ) ≤ [ 1 − 4 λ m i n A λ m a x A ( λ m i n A + λ m a x A ) 2 ] E ( x ⃗ k ) = ( λ m i n A − λ m a x A λ m i n A + λ m a x A ) 2 E ( x ⃗ k ) E(\vec{x}_{k+1})\le\left[1-\dfrac{4\lambda^A_{min}\lambda^A_{max}}{(\lambda^A_{min}+\lambda^A_{max})^2}\right]E(\vec{x}_k) =\left(\dfrac{\lambda^A_{min}-\lambda^A_{max}}{\lambda^A_{min}+\lambda^A_{max}}\right)^2E(\vec{x}_k) E(xk+1)≤[1−(λminA+λmaxA)24λminAλmaxA]E(xk)=(λminA+λmaxAλminA−λmaxA)2E(xk)
那么
0 ≤ E ( x ⃗ k ) ≤ ( λ m i n A − λ m a x A λ m i n A + λ m a x A ) 2 k E ( x ⃗ 0 ) 0\le E(\vec{x}_{k})\le\left(\dfrac{\lambda^A_{min}-\lambda^A_{max}}{\lambda^A_{min}+\lambda^A_{max}}\right)^{2k}E(\vec{x}_0) 0≤E(xk)≤(λminA+λmaxAλminA−λmaxA)2kE(x0)
即
lim k → ∞ E ( x ⃗ k ) = 0 \lim_{k\rightarrow\infty}E(\vec{x}_{k})=0 k→∞limE(xk)=0
因为 A \bold A A 为对称正定矩阵,当且仅当 x ⃗ k = x ⃗ \vec{x}_k=\vec{x} xk=x 时, E ( x ⃗ k ) = 0 E(\vec{x}_k)=0 E(xk)=0,故基于最速下降法的 “变步长Richardson 迭代法”必定收敛,且收敛速度至少为:
( λ m i n A − λ m a x A λ m i n A + λ m a x A ) 2 = [ c o n d ( A ) 2 − 1 c o n d ( A ) 2 + 1 ] 2 \left(\dfrac{\lambda^A_{min}-\lambda^A_{max}}{\lambda^A_{min}+\lambda^A_{max}}\right)^2=\left[\dfrac{cond(\bold A)_2-1}{cond(\bold A)_2+1}\right]^2 (λminA+λmaxAλminA−λmaxA)2=[cond(A)2+1cond(A)2−1]2
优于Richardson 迭代法的最佳收敛速度。
那么,当对称正定矩阵 A \bold A A 的最大特征值越接近于最小特征值时,收敛速度越快,换而言之,等值线的椭圆长轴短轴长度越接近时收敛速度越快,最佳的情况是等值线为同心圆,此时仅需一步便可得到精确解。而若椭圆偏心率越大,越扁平,即最大特征值与最小特征值相差越大,收敛速度便会越小。