ss:SelectiveSearch(SS,选择性搜索)选择搜索算法观点:图像中物体可能存在的区域应该是有某些相似性或者连续性的,因此选择搜索采用子区域合并的方法进行提取边界框bounding box
首先,对输入图像进行分割并产生许多子区域,
其次,根据这些子区域之间的相似性(颜色、纹理、大小等)进行区域合并,由小变大,不断迭代并合并,
每次迭代过程中对这些合并的子区域做外切矩形,这些子区域的外切矩形就是通常说的候选框。
自下而上,也就是从像素级开始检测,慢慢融合到比较大的位置。
scale1 就是最小尺度上分割成很多小的区域(super pixel,超像素),
把特征距离近的(如颜色比较像)的都融合到一起,产生比较大的区域。
scale2 就是中间尺度上的分割和融合,能得到更大的区域,scale3同理。
最后就产生了目标框。
搜索一下nms非极大值抑制
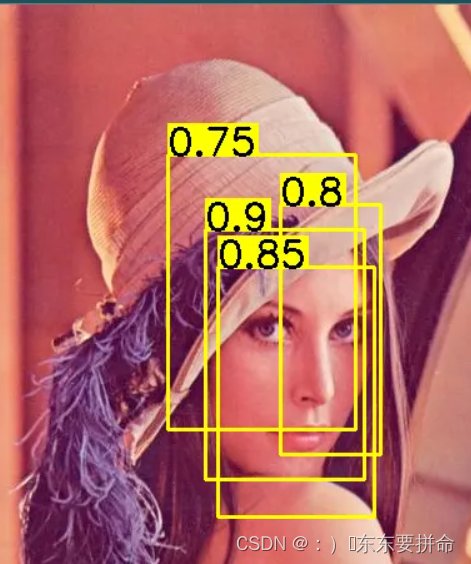
那么多框都是region proposals 候选框,
nms之后就留下 置信度最大 或者说是最有可能的框
这里就是留下0.9的那个


