一、前言
此示例演示如何使用颜色信息来检测和跟踪在可能不存在车道标记的主要住宅环境中设置的道路边缘。基于颜色的跟踪示例说明了如何使用色彩空间转换块、霍夫变换块和卡尔曼滤波器块来检测和跟踪使用色调和饱和度的信息。
二、模型
下图显示了基于颜色的道路跟踪模型:
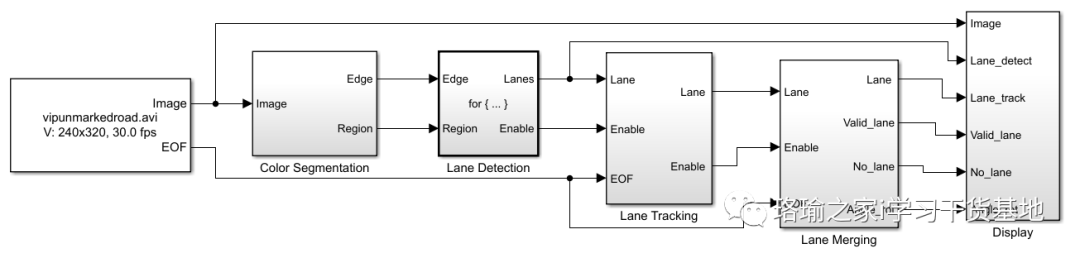
三、算法
示例算法执行搜索,通过分析视频图像的颜色行为变化来定义道路的左边缘和右边缘。首先,从图像的底部中心开始搜索边缘像素或穿过足够数量的彩色像素的线(以先到者为准)。搜索将移动到图像的左上角和右上角。
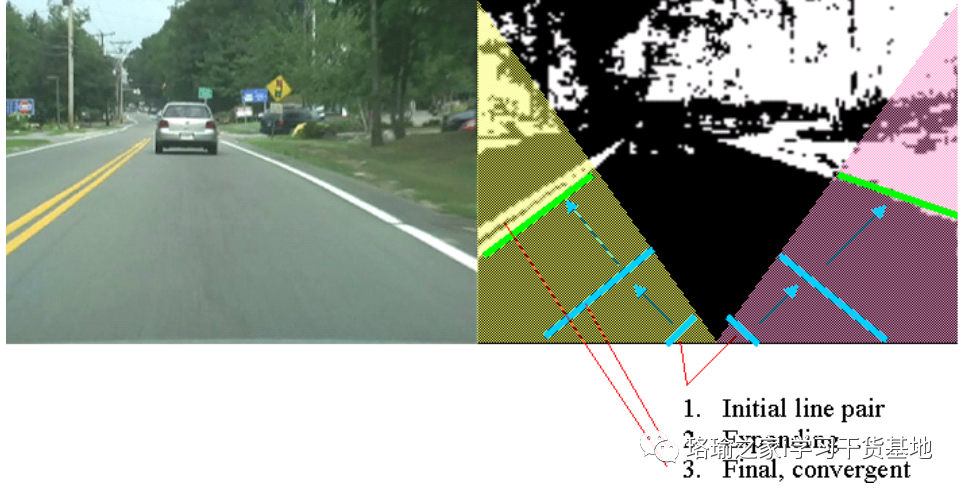
为了处理低质量的视频序列,其中路边可能难以看到或被阻塞,该算法将等待多帧有效的边缘信息。该示例使用相同的过程来决定何时开始忽略一侧。
四、跟踪结果
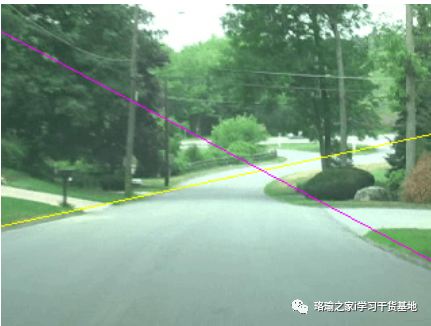
检测窗口显示在当前视频帧中检测到的路边。
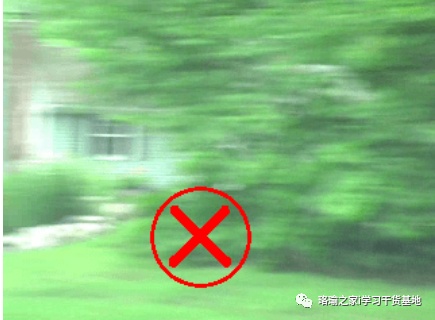
当没有可见的路边时,“追踪”窗口将显示错误符号。
当只有道路的一侧可见时,该示例将显示一个平行于道路一侧的箭头。箭头的方向朝向路侧与影像边界之间的交叉点上点。

当道路两侧都可见时,该示例显示道路中心的方向箭头,其方向是通过对左右两侧的方向求平均值来计算的。

五、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
程序有偿获取:评论区下留言,博主看到会私信你。