文章目录
- 1. IMU概念
- 2. IMU模块概述
- 2.1 MEMS传感器
- 2.2 三轴陀螺仪
- 3. IMU输出数据在移动机器人算法中的应用
1. IMU概念
惯性测量模块(IMU,Inertial Measurement Unit)组成。IMU提供飞行器在空间姿态的传感器原始数据,一般由陀螺仪传感器/加速度传感器/电子罗盘提供飞行器9DOF数据。
IMU中使用的传感器基本上都是微机电系统(MEMS),是半导体工业中非常重要的一个分支。
微机电系统(MEMS, Micro-Electro-Mechanical System)是一种先进的制造技术平台。微机电系统是微米大小的机械系统,是以半导体制造技术为基础发展起来的。
2. IMU模块概述
LPMS-NAV3 系列是基于 MEMS 传感器的高精度、 高稳定性系列姿态传感器, 其中航向角经我司算法特别优化, 能保证长时间内的稳定性, 因此该系列产品适用于需要精确航向数据的机器人或移动平台应用。 此外, 该系列产品内嵌一功能强大的处理器, 通过整合处理陀螺仪和加速度计等传感器数据, 最终提供下列数据输出: 原始数据(加速度、 角速度等) 、 姿态角数据(欧拉角和四元数) 、 校准后的线性加速度和角速度以及温度数据。

一颗单轴高精度陀螺仪,一颗6轴芯片(3轴加速度/3轴陀螺仪)。z用第一颗,xy用第二颗。
2.1 MEMS传感器
MEMS是Micro Electro Mechanical System的缩写,简称微机电系统,是按功能要求在芯片上把微电路和微机械集成于一体的系统。MEMS基于光刻、腐蚀等传统半导体技术,融入超精密机械加工,并结合力学、化学、光学等学科知识和技术基础,使得一个毫米或微米级的MEMS具备精确而完整的机械、化学、光学等特性结构
什么是MEMS传感器
2.2 三轴陀螺仪

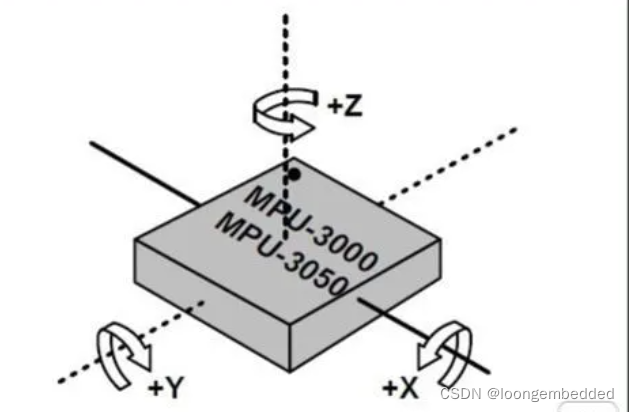
平地上使用绕z轴旋转判断航向角,爬坡的时候绕X轴旋转