群体智能是近年来发展迅速的一个人工智能学科领域,通过对蚂蚁、蜜蜂等为代表的社会性昆虫群体行为的研究,实现分布式等智能行为。作为新一代人工智能的重要方向,群体智能通常用于无人机、机器人集群的协同作业。目前,群体智能在基础理论和关键技术应用上还处于初级阶段,仍然有广阔的应用和发展空间。科技部启动的《科技创新2030“新一代人工智能”重大项目指南》中,也将“群体智能”列为人工智能领域的五大持续攻关方向之一。可见,对于群体智能的探究具有重要的现实意义。北京智能佳科技有限公司除了基于EPUCK2机器人的群体协作系统外,还有体积更小巧的Elisa机器人群体协作。

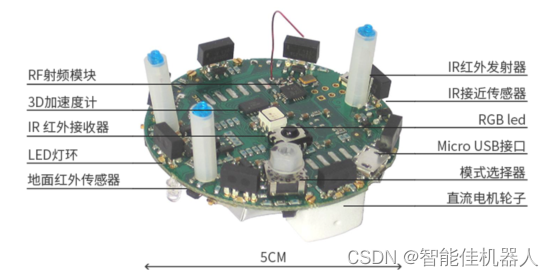
Elisa-3是 GCtronic 为研究和教育而设计的迷你移动机器人,它的直径为5厘米(EPUCK2 为7.5厘米),高度为3厘米,由于成本低,适合机器人爱好者使用。Elisa-3 机器人的灵感来自已在许多研究和教育机构中采用的 epuck 机器人。
第一个版本“Elisa-1”成功用于苏黎世联邦理工学院自治系统实验室与苏黎世迪士尼研究院共同开发的多机器人协作项目。
Elisa-3采用兼容Arduino 的Atmel微处理器,并具有大量传感器(IR 接近传感器、加速度计传感器、地面红外传感器)。Elisa-3可以停靠和自行充电。其自带的射频通模块信旨在实现同时实时控制多达100个机器人,适用于群体机器人开发。
Elisa-3硬件和软件是完全开源的,可以对每个电子设备进行底层访问,提供无限的扩展可能。


包装组件
| 名称 | 数量 |
|---|---|
| Elisa-3机器人 | 6 |
| 充电器,用于六台机器人 | 2 |
| 无线基站模块迷你USB电缆 | 1 |
| 红外摄像头和彩色摄像头 | 1 |
| 调试场地 | 1 |

产品规格
| 项目 | 详细信息 |
|---|---|
| 尺寸、重量 | 直径50mm,高度30mm,39g |
| 机械结构 | PCB、电机支架、用于漫射光的顶部白色塑料 |
| 电池、充电时间 | 锂聚合物充电电池(2 x 130mAh时,3.7V)。可以连续工作大约 3h,充电时间约 1h30min。 |
| 充电 | 2个充电触点,用于对接充电桩或通过 PC 或壁式插头的微型 USB充电 |
| 处理器 | Atmel ATmega2560 @ 8MHz(~ 8 MIPS)8位微控制器 |
| 存储 | 内存:8 KB;闪存:256 KB; EEPROM:4 KB |
| 电机 | 2个带25:1减速齿轮的直流电机;反电动势(back-EMF)控制速度 |
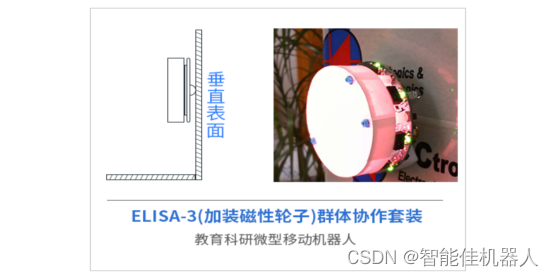
| 轮子(不带磁轮) | 磁吸,附着力约为1 N (100 g),取决于表面材料和油漆。车轮直径 = 9mm。车轮之间的距离= 40.8mm。 |
| 速度 | MAX值:60cm/s |
| 选择器 | 16位旋转开关和1个按钮 |
| 红外接近传感器 | 8个红外传感器测量环境光和物体,检测距离范围 4cm每个传感器彼此相距45° |
| 地面红外传感器 | 4个地面传感器,可巡线(放置在机器人的正前方) |
| LED | 机器人中央的1个 RGB LED,机器人周围有8个绿色 LED |
| 红外发射器 | 3个 IR 发射器(机器人前面 2 个,机器人后面 1 个) |
| 遥控接收器 | 用于标准遥控命令的红外线接收器 |
| 加速度计 | 沿 X、Y 和 Z 轴的 3D 加速度计 |
| 有线通信 | 通过micro USB的标准串行端口(最高38kbps),USB电缆(USB转串) |
| 无线通信 | 例如4个机器人为250Hz,100个机器人为 10Hz;通信距离高达10 m |
| 扩展总线 | 可选连接器:2 x UART、I2C、2 x PWM、VCC、GND、模拟和数字接口 |
| 编程 | 使用AVR-GCC 编译器(适用于 Windows 的 WinAVR)进行 C/C++ 编程免费编译器和 IDE (AVR Studio / Arduino) |
配置定位
- 打开4个机器人,并将它们放置在环境中心附近(将它们远离边界为了一个干净的开始);注意,所有机器人的选择器都在15位。
- 访问Elisa-3维基(http://www.gctronic.com/doc/index.php/Elisa-3#Tracking)并下载位置控制示例应用程序“水平位置控制(4个机器人)”(http://www.gctronic.com/doc/index.php/Elisa-3#Position_control). 将其提取到您的首选位置。
- 恢复SwisTrack并打开名为“elisa3-usb_4robots.SwisTrack”的配置文件包含在目录“swistrack/SwisTrackEnvironment”中(选择“文件 打开”并选择配置文件)。基本上,此配置文件包含相机和图像的设置处理用于跟踪机器人的部件;此外,它还指定发布跟踪信息到TCP端口3000。
- 单击顶部的“运行”按钮启动SwisTrack处理。因为机器人没有然而,他们的红外发射器打开了,此时没有检测到机器人。不要担心,当位置控制将被执行,它们的IR将被打开并且机器人将被检测。
- 现在,您可以通过执行“位置控制模式-4机器人/bin/Debug/position-control-pattern-horizontal-4”来启动位置控制示例应用程序-robots.exe”。应用程序将询问您要控制的机器人的4个地址,并将其传递给环境中已有机器人的地址。最初有一个校准阶段机器人将原地旋转,然后机器人应该开始按照正方形的形状移动。
- 在SwisTrack中,您可以选择“较近邻居跟踪”组件(单击它),以便在屏幕上查看跟踪结果。
跟踪
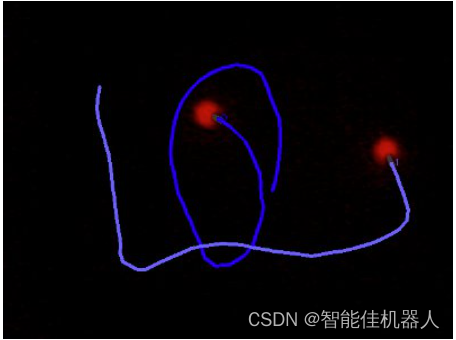
使用跟踪软件进行了一些实验,以便能够通过背面红外发射器跟踪Elisa-3机器人,以下是2个机器人的结果图像:
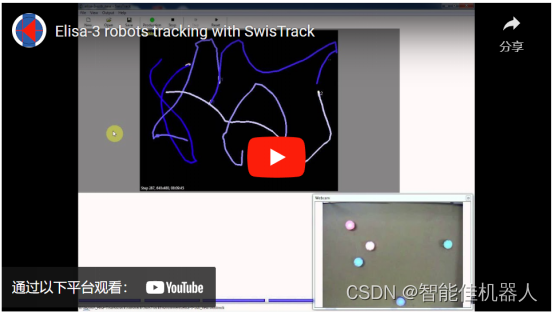
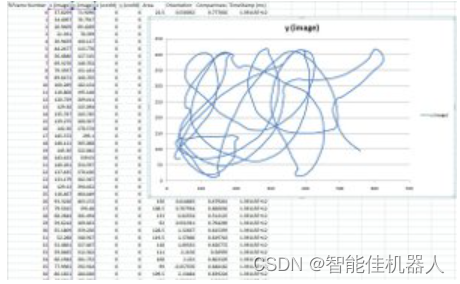
跟踪软件还可以让您轻松地记录生成的数据,然后您可以详细说明这些数据。以下是使用5个机器人进行的实验中的一个示例:
下面的视频展示了用20、30、38台Elisa-3机器人做的测试,跟踪效果还是不错的;重要的是要注意我们停止了 38 个 Elisa-3 机器人,因为我们实验室中有这些机器人。

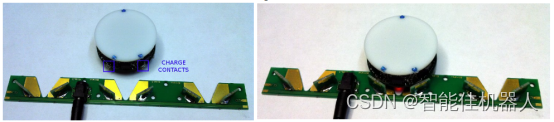
机器人充电
Elisa-3可以在充电站中引导,以便自动充电;充电时无需拔下电池。下图显示机器人接近充电站;led指示灯指示机器人充电:
当机器人电量不足时,微控制器会收到通知,该信息也会在标志字节中传输到PC;这让用户能够将机器人驾驶到充电站,并在它实际充电时得到通知。此外,当微型 USB 数据线连接到计算机时,机器人也会充电;请注意,如果USB 线连接到集线器,则需要为该集线器供电。

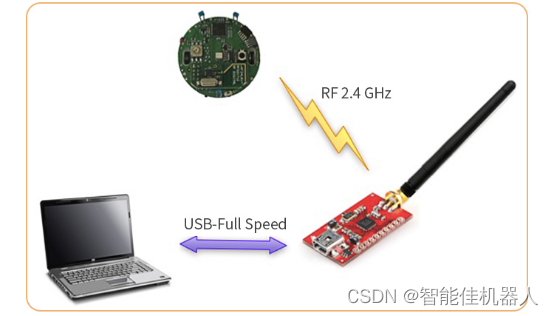
无线连接
无线电基站通过 USB 连接到 PC,并与机器人无线传输数据。同样,安装在机器人上的无线电芯片 ( nRF24L01+ ) 通过 SPI 与微控制器通信,并与 PC 无线传输数据。
机器人由存储在微控制器内部 EEPROM 的最后两个字节中的地址标识;机器人固件设置无线电模块从 EEPROM 读取地址。该地址与机器人下方标签上写的机器人 ID 相对应,不应更改。
编程
该机器人使用串行引导加载程序进行预编程。为了将新程序上传到机器人,需要一根微型 USB 数据线。与机器人的连接如图:

如果您使用的是 Arduino IDE,则无需遵循此过程,而是参阅Arduino IDE 项目部分。
如果您在编程过程中遇到一些问题(例如超时问题),您可以尝试按照以下顺序进行操作:打开机器人,将机器人从计算机上拔下,将机器人插入计算机,它会闪烁一些;当闪烁终止时再次执行编程命令。请注意,每次您需要对机器人重新编程时,您都需要拔下并重新插入计算机的电缆。
装配文件与安装效果
您可以从此处下载文档:
https://projects.gctronic.com/elisa3/tracking-doc.pdf

相关项目推荐