1.NVIDIA Driver和Cuda安装
在Ubuntu18.04机器上安装好NVIDIA Driver4.18和CUDA10.1,版本号分别为4.18和10.1
查看NVIDIA Driver版本号:nvidia-smi
查看CUDA版本号:nvcc -V
2.安装MiniConda,并创建和管理虚拟环境
2.1 安装MiniConda,官网:Miniconda — conda documentation
2.2 创建名为openmmlab虚拟环境
conda create --name openmmlab python=3.8 -y
2.3 激活并进入该虚拟环境
conda activate openmmlab
3.安装与CUDA版本号匹配的pytorch,这里安装的是1.8.1
#CUDA 10.1
pip install torch==1.8.1+cu101 torchvision==0.9.1+cu101 torchaudio==0.8.1 -f https://download.pytorch.org/whl/torch_stable.html
与具体CUDA版本号对应匹配的pytorch可查询如下页面:
Previous PyTorch Versions | PyTorch
安装过程与结果:
4.安装openmim
pip install openmim -i Simple Index
安装过程与结果:

5.安装mmcv-full
mim install mmcv-full -i Simple Index
安装过程与结果:
6.安装mmdet
mim install mmdet -i Simple Index
7. 安装mmsegmentation
mim install mmsegmentation -i Simple Index
8.克隆mmdetection3d框架并安装
git clone https://github.com/open-mmlab/mmdetection3d.git
cd mmdetection3d
pip install -e . -i Simple Index
安装过程与结果:


9. 下载模型文件
在mmdetection3d/model_zoo.md at 1.0 · open-mmlab/mmdetection3d · GitHub下载Demo运行所需模型文件,比如,我下载的是PointPillars模型(Kitti数据集):
在mmdetection3d/configs/pointpillars at 1.0 · open-mmlab/mmdetection3d · GitHub下载这两个模型文件:
hv_pointpillars_secfpn_6x8_160e_kitti-3d-3class_20220301_150306-37dc2420.pth
hv_pointpillars_secfpn_6x8_160e_kitti-3d-car_20220331_134606-d42d15ed.pth
在mmdetection3d目录下创建checkpoints目录并将这两个文件放入
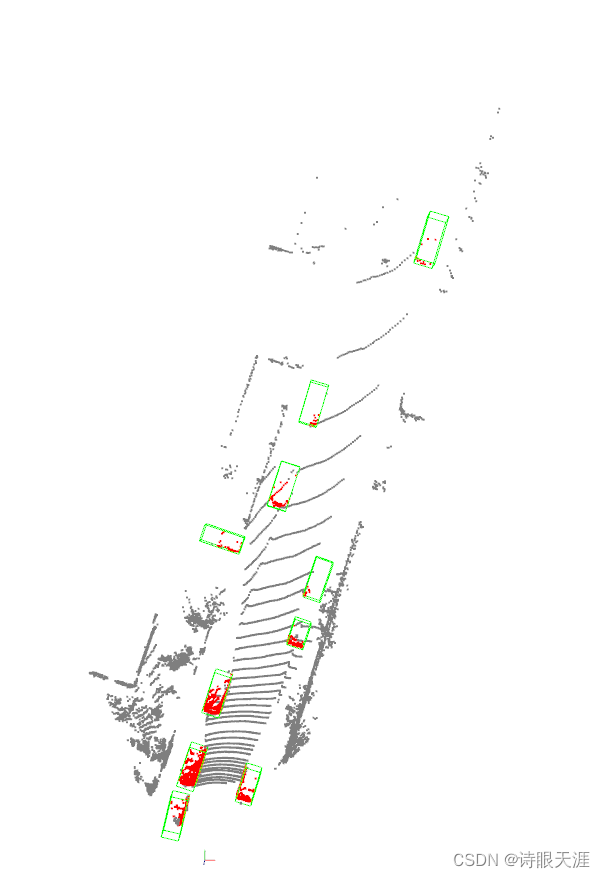
10.运行Demo程序:
python demo/pcd_demo.py demo/data/kitti/000008.bin configs/pointpillars/pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car.py checkpoints/hv_pointpillars_secfpn_6x8_160e_kitti-3d-car_20220331_134606-d42d15ed.pth --show
运行结果如下:
附:一些常用的命令
查看pytorch和CUDA版本号:
python -c 'import torch;print(torch.__version__);print(torch.version.cuda)'
退出conda虚拟环境:
conda deactivate
删除虚拟环境:
conda env remove -p 要删除的虚拟环境路径




