FOC中的Clarke变换_TI和ST电机控制库的源码实现
FOC中的PARK变换_TI和ST电机控制库的源码实现
FOC中的反PARK变换_TI和ST电机控制库的源码实现
park变换
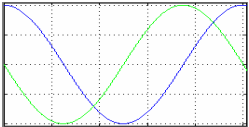
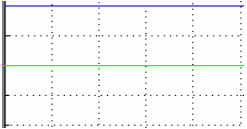
该变换将平衡两相正交平稳系统中的矢量变换为正交旋转坐标系。

数学公式:
{ I D = I α × cos θ + I β × sin θ I Q = − I α × sin θ + I β × cos θ \left\{ \begin{array}{l} I_D=I_{\alpha}\times \cos \theta +I_{\beta}\times \sin \theta\\ I_Q=-I_{\alpha}\times \sin \theta +I_{\beta}\times \cos \theta\\ \end{array} \right. {ID=Iα×cosθ+Iβ×sinθIQ=−Iα×sinθ+Iβ×cosθ
跟着转子旋转的“d-q”坐标系成功把cos,sin正余弦信号转化线性的了。
theta角度是由位置传感器得到的已知变量。
TI的实现
也是很简单的两句计算,cos和sin(theta)是外部计算传入参数。对于三角函数,TI有自己的库去计算。
而cos和sin(theta)不止只有在park中使用,其他地方也会使用,在这函数中再计算一次,未免多花时间了。st的库即比较麻烦。
typedef struct { _iq Alpha; // Input: stationary d-axis stator variable _iq Beta; // Input: stationary q-axis stator variable _iq Angle; // Input: rotating angle (pu) _iq Ds; // Output: rotating d-axis stator variable _iq Qs; // Output: rotating q-axis stator variable_iq Sine;_iq Cosine; } PARK; /*------------------------------------------------------------------------------PARK Transformation Macro Definition
------------------------------------------------------------------------------*/
#define PARK_MACRO(v) \\v.Ds = _IQmpy(v.Alpha,v.Cosine) + _IQmpy(v.Beta,v.Sine); \v.Qs = _IQmpy(v.Beta,v.Cosine) - _IQmpy(v.Alpha,v.Sine);
ST的库:
ST的代码写很“规矩”,一步一步的。有很多限幅检测。
在对theta求角度的查表法也绕了一下。解决浮点计算,统一后,全使用int型的。
typedef struct
{int16_t hCos;int16_t hSin;
} Trig_Components;typedef struct
{int16_t alpha;int16_t beta;
} alphabeta_t;typedef struct
{int16_t q;int16_t d;
} qd_t;__weak qd_t MCM_Park( alphabeta_t Input, int16_t Theta )
{qd_t Output;int32_t d_tmp_1, d_tmp_2, q_tmp_1, q_tmp_2;Trig_Components Local_Vector_Components;int32_t wqd_tmp;int16_t hqd_tmp;// 传入theta 查表计算得到 cos和sin的值Local_Vector_Components = MCM_Trig_Functions( Theta );// 不保证溢出,先计算一次,然后各种限幅判断,最后再做IQ的赋值/*No overflow guaranteed*/// 计算 alpha*cos(theta)q_tmp_1 = Input.alpha * ( int32_t )Local_Vector_Components.hCos;/*No overflow guaranteed*/// 计算 beta*sin(theta)q_tmp_2 = Input.beta * ( int32_t )Local_Vector_Components.hSin;/*Iq component in Q1.15 Format */
#ifdef FULL_MISRA_C_COMPLIANCYwqd_tmp = ( q_tmp_1 - q_tmp_2 ) / 32768;
#else/* WARNING: the below instruction is not MISRA compliant, user should verifythat Cortex-M3 assembly instruction ASR (arithmetic shift right) is used bythe compiler to perform the shift (instead of LSR logical shift right) */// IQ的计算,计算完了,去各种限幅。 右移15是sin和cos/32768得到真正的值,又回到16位以内wqd_tmp = ( q_tmp_1 - q_tmp_2 ) >> 15;
#endif/* Check saturation of Iq */if ( wqd_tmp > INT16_MAX )hqd_tmp = INT16_MAX;else if ( wqd_tmp < ( -32768 ) )hqd_tmp = ( -32768 );elsehqd_tmp = ( int16_t )( wqd_tmp );Output.q = hqd_tmp;if ( Output.q == ( int16_t )( -32768 ) ){Output.q = -32767;}/*No overflow guaranteed*/d_tmp_1 = Input.alpha * ( int32_t )Local_Vector_Components.hSin;/*No overflow guaranteed*/d_tmp_2 = Input.beta * ( int32_t )Local_Vector_Components.hCos;/*Id component in Q1.15 Format */
#ifdef FULL_MISRA_C_COMPLIANCYwqd_tmp = ( d_tmp_1 + d_tmp_2 ) / 32768;
#else/* WARNING: the below instruction is not MISRA compliant, user should verifythat Cortex-M3 assembly instruction ASR (arithmetic shift right) is used bythe compiler to perform the shift (instead of LSR logical shift right) */wqd_tmp = ( d_tmp_1 + d_tmp_2 ) >> 15;
#endif/* Check saturation of Id */if ( wqd_tmp > INT16_MAX ){hqd_tmp = INT16_MAX;}else if ( wqd_tmp < ( -32768 ) ){hqd_tmp = ( -32768 );}else{hqd_tmp = ( int16_t )( wqd_tmp );}Output.d = hqd_tmp;if ( Output.d == ( int16_t )( -32768 ) ){Output.d = -32767;}return ( Output );
}
参考:
TI DMC MATH_13.1pdf
STM32 FOC 软件培训库pdf
被抛弃的写随笔公众号改写技术文章了,感兴趣的可以关注公众号:王崇卫