1. 功能说明
在R035c样机上安装一个六轴陀螺仪传感器,本文示例将实现机器人身体平衡功能。当用手把机器人人形部分摆动到左侧时,人形部分会自动恢复到中间;当用手把机器人人形部分摆动到右侧时,人形部分也会自动恢复到中间。
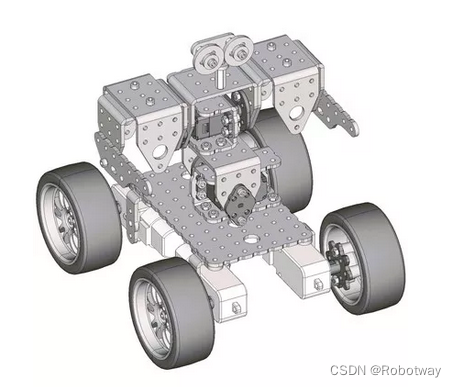
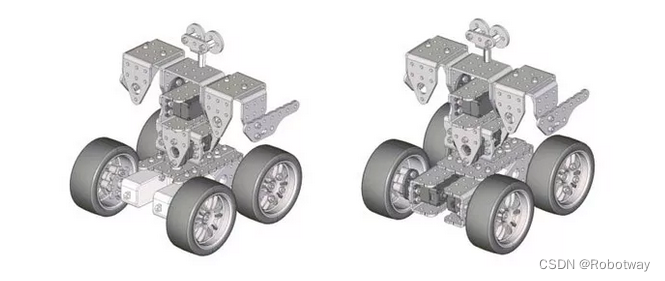
2. 结构说明
R035c样机主要是由四轮四驱底盘上搭载一个人形部分机构组成的。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 传感器 | 六轴陀螺仪 |
| 电池 | 7.4V锂电池 |
电路连接:
① 六轴陀螺仪传感器(GND、VCC、RX、TX)连接在Bigfish扩展板的Gnd、Vcc(3.3v)、RX、TX;
② 机器人身体中间部分的舵机连接在Bigfish扩展板的(Gnd、Vcc、D3)端口。

4. 功能实现
编程环境:Arduino 1.8.19
实现思路:实现机器人身体平衡功能。当用手把机器人人形部分摆动到左侧时,人形部分会自动恢复到中间;当用手把机器人人形部分摆动到右侧时,人形部分也会自动恢复到中间。
将参考例程(Robot_body_balance.ino)下载到主控板:
【详细源程序代码内容请见 人车混合机器人-身体平衡】
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-04-25 https://www.robotway.com/------------------------------*//* 功能:机器人身体平衡接线:陀螺仪传感器(GND、VCC、RX、TX)接在扩展板的( Gnd、Vcc(3.3v)、RX、TX);机器人身体中间部分的舵机接在扩展板的(Gnd、Vcc、D3);操作:当用手把机器人人形部分摆动到左侧,人形部分会自动恢复到中间;当用手把机器人人形部分摆动到右侧,人形部分会自动恢复到中间;注意:一定要等人形部分的舵机不转动了,再手动摆动机器人;*/#include<Servo.h> //调用舵机库函数#include<Math.h>Servo myservo;#define myservopin 3 //机器人身体中间部分的舵机引脚号//陀螺仪的相关参数#define Gyroscope_left_LimitAngle_X 0.50 //读取到陀螺仪 X 轴向左偏的极限数值#define Gyroscope_Right_LimitAngle_X -0.65 //读取到陀螺仪 X 轴向右偏的极限数值#define Gyroscope_Middle_LimitAngle_X -0.01 //读取到陀螺仪 X 轴平放时的数值//机器人人形部分姿态参数#define Servo_One_Min_Angle 66 //机器人身体中间部分的舵机左偏极限角度#define Servo_One_Max_Angle 118 //机器人身体中间部分的舵机右偏极限角度#define Servo_One_Middle_Angle 90 //机器人身体中间部分的舵机处于中间位置角度#define Servo_Speed 10 //舵机速度void setup(){Serial.begin(115200); //打开串口,并设置波特率为115200myservo.attach(myservopin);}void loop(){Get_gyroscope_And_Control(); //根据陀螺仪传感器的数据实现姿态跟随}判断机器人人形部分姿态的参考程序(Gyroscope_Device.ino)如下:
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-04-25 https://www.robotway.com/------------------------------*/unsigned char Re_buf[11],counter=0;unsigned char sign=0;float a[3],w[3],angle[3],T;int gyroscope_middle_position_min = (Gyroscope_Middle_LimitAngle_X-0.2) * 100;int gyroscope_middle_position_max = (Gyroscope_Middle_LimitAngle_X+0.2) * 100;int gyroscope_left_position_min = Gyroscope_left_LimitAngle_X * 100;int gyroscope_left_position_max = gyroscope_middle_position_max;int gyroscope_right_position_min = gyroscope_middle_position_min;int gyroscope_right_position_max = Gyroscope_Right_LimitAngle_X * 100;unsigned long record_time = 0;int count = 0;void Get_gyroscope_And_Control(){int gyroscope_acc_data[2]={0,0};int map_data= 0;int servo_angle = 0;if(sign){sign=0;if(Re_buf[0]==0x55) //检查帧头{ switch(Re_buf [1]){case 0x51:{record_time = millis();a[0] = (short(Re_buf [3]<<8| Re_buf [2]))/32768.0*16;a[1] = (short(Re_buf [5]<<8| Re_buf [4]))/32768.0*16;a[2] = (short(Re_buf [7]<<8| Re_buf [6]))/32768.0*16;T = (short(Re_buf [9]<<8| Re_buf [8]))/340.0+36.25;map_data = a[0] * 100;//把陀螺仪的沿X轴的加速度值转为舵机的角度if( ( millis() - record_time ) < 3000 ){count ++;//每隔1s,判断机器人人形部分的姿态;if(count >= 100) {count = 0;//默认机器人处于平衡态(如机器人处于直立状态)if(map_data>=gyroscope_middle_position_min && map_data<=gyroscope_middle_position_max) //i am state{ServoStop(); }//检测到机器人人形部分摆动到左侧,人形部分会自动恢复到平衡态(中间);if(map_data>gyroscope_left_position_max && map_data< gyroscope_left_position_min) //i am left{ myservo.attach(myservopin);servo_angle = map( abs(map_data), abs(gyroscope_left_position_min), abs(gyroscope_left_position_max), Servo_One_Min_Angle, Servo_One_Middle_Angle);Servo_move(servo_angle, Servo_One_Middle_Angle);delay(300);ServoStop();}//检测到机器人人形部分摆动到右侧,人形部分会自动恢复到平衡态(中间);if(map_data>gyroscope_right_position_max && map_data< gyroscope_right_position_min) //i am right{myservo.attach(myservopin);servo_angle = map( abs(map_data), abs(gyroscope_right_position_min), abs(gyroscope_right_position_max), Servo_One_Middle_Angle, Servo_One_Max_Angle);Servo_move(servo_angle, Servo_One_Middle_Angle);delay(300);ServoStop();} } } }break;}}} }void serialEvent() {while (Serial.available()) { Re_buf[counter]=(unsigned char)Serial.read();if(counter==0&&Re_buf[0]!=0x55) return; //第0号数据不是帧头 counter++; if(counter==11) //接收到11个数据{ counter=0; //重新赋值,准备下一帧数据的接收sign=1;} }}void ServoStop(){myservo.detach();digitalWrite(myservopin,LOW);}void Servo_move(int start_angle, int finish_angle){int flag = 0;if( (start_angle - finish_angle) >0 ){ flag = -1;}else { flag = 1; }for( int i=0; i< abs(start_angle - finish_angle);i++){myservo.write( start_angle + flag*i );delay(Servo_Speed);}}5. 扩展样机
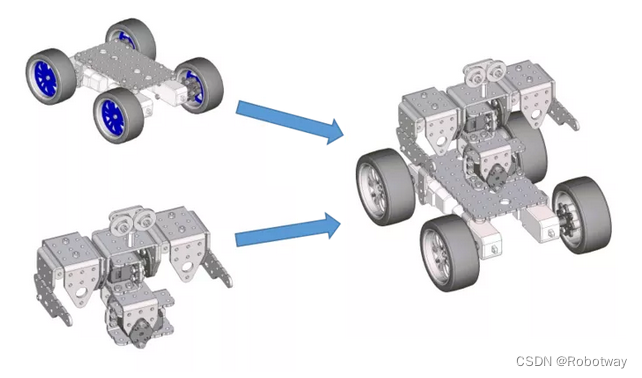
本样机可以有一些扩展,如减少样机底盘上的2个直流驱动轮,或者将样机底盘上的直流驱动轮替换成舵机,如下图所示: