在实车工况下,路面的附着情况是未知的。在仿真时通常都是指定路面附着系数,路面附着系数很难通过设备来直接识别。因此需要进行路面附着系数的估算。采用横向加速度信号来衡量路面附着系数是路面附着系数估算的通常方法。但由于传感器对横向加速度的信号不可避免的出现滞后性,滞后时间在 200ms 左右,如果在横向加速度尚未达到巅峰之时,这种滞后会将横向加速度在未达到最大值之前的加入计算,这使得估计附着系数与实际附着系数存在较大偏差(如果仅仅将此时的估计附着系数作为实际附着系数纳入计算,由于未修正的估计附着系数偏小,将导致轮胎附着力计算偏小,导致后续计算出现较大误差甚至是出现错误)。
为修正这一偏差,利用通过大量试验取得的经验性附着系数估算偏差补偿量对这一缺陷进行补偿,估算路面附着系数。经验性公式如下式(2-25)所示
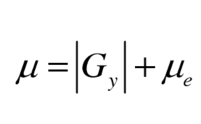



(注:仲裁模块可见下图的地面附着系数估计流程)

如上所述进行附着系数估计,最后得到路面附着系数将被输入到建立的轨迹跟随控制器中。
公式2-25可以参考文献:李亮,朱红军.用于汽车稳定性控制的路面附着识别[J]10.3901/JME.2014.02.132
(相互学习,如有错误,请在评论区留言指正。谢谢!)