SM74HC595D电路级联教程
1简述
SM74HC595D 是一种具有8 位锁存、8 位串行输入、 8 位串/并行输出、 串—并移位寄存器和三态输出功能的通用LED 驱动芯片。具有8 位移位寄存器和一个存储器,三态输出功能。 该设备具有串行输入(SER)和串行输出(Q7S)来级联和异步复位输入SCLR的功能。
移位寄存器和存储寄存器时钟都是分开的。
在移位寄存器时钟(SCK)的上升沿时,SER上的数据会被移入移位寄存器,在存储寄存器时钟(RCK)上升沿时,移位寄存器里的数据传输到存储寄存器,当输出使能G为低时,存储寄存器里的数据就会并行输出。
当SCLR为低电平时复位移位寄存器,即将移位寄存器数据清零。
当OE为高电平时输出为高阻态。
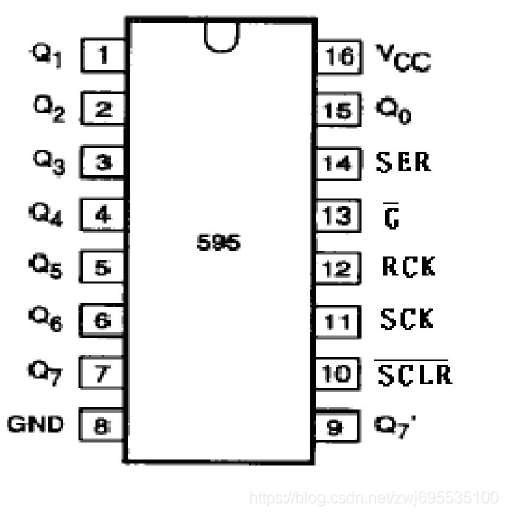
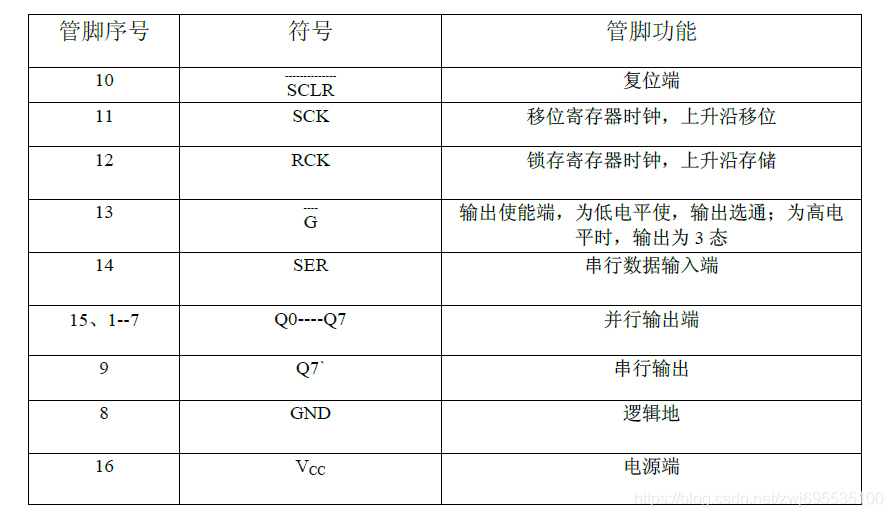
2 引脚功能
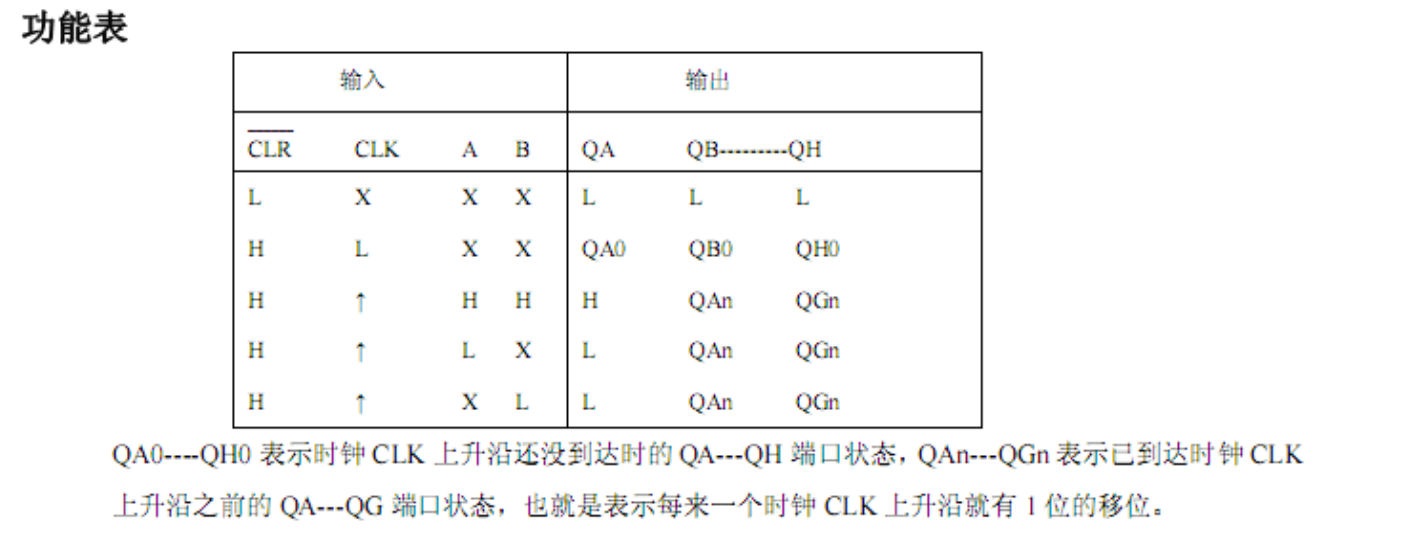
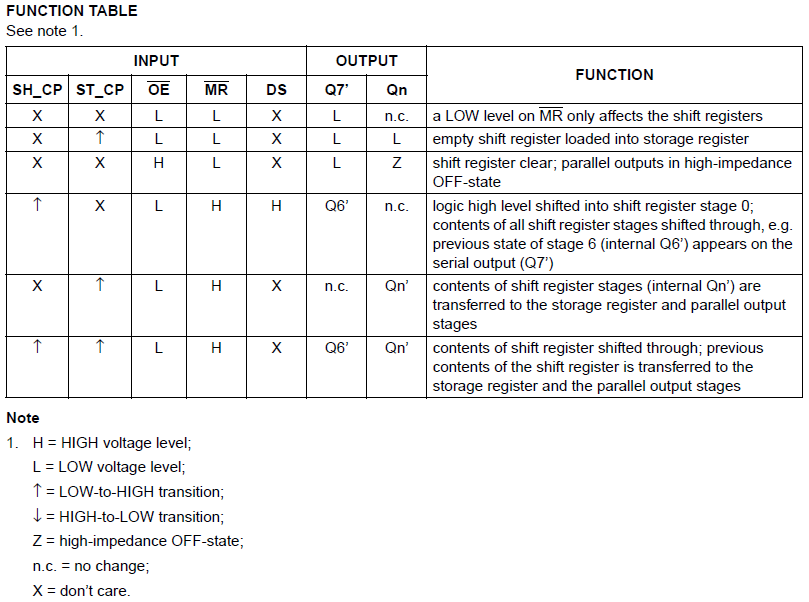
3 真值表
再来看看该芯片的的真值表图。
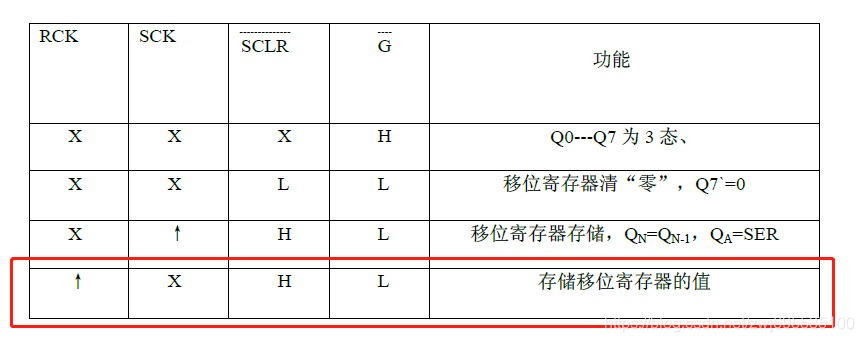
从真值表中可以看出其逻辑关系,主要使用红框部分。
4 逻辑关系
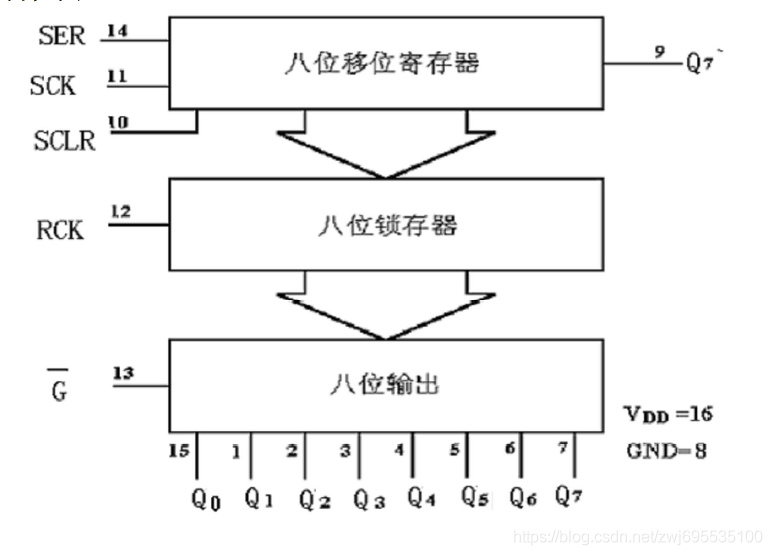
从功能框图中可以看出,引脚10、11、14都是作用在移位寄存器的,被传输的数据先进入移位寄存器,再通过SCK将移位寄存器的数据存入存储寄存器,最后通过输出使能端\G使能数据并行输出,引脚9 Q7S用于级联。
我们知道74HC595是将数据串转并的,也就是数据(8bit)串行输入,并行输出。串行并行这些概念就不多说了,不清楚的自行查资料。
使用步骤:
1、先把要传输的数据(8bit)从引脚14 SER输入到74HC595
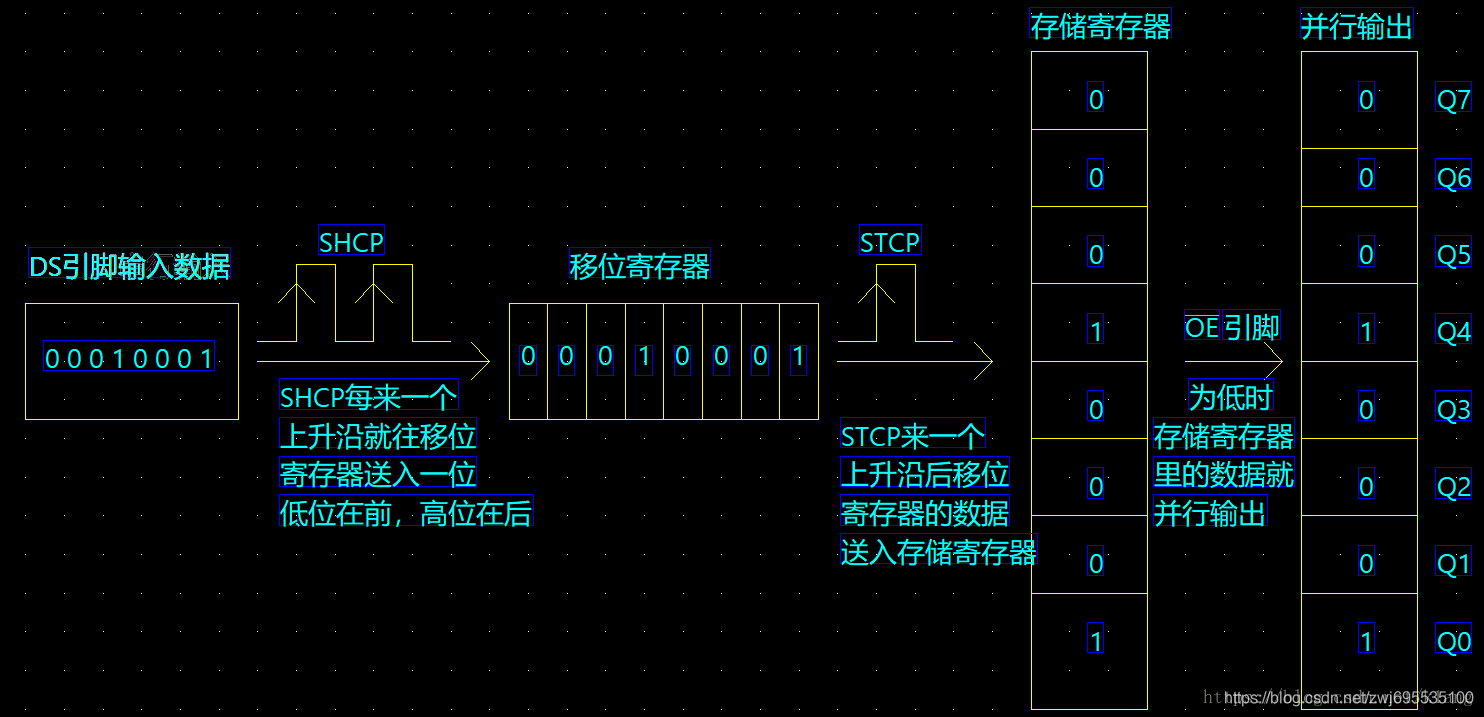
2、将从SER上的数据串行移入移位寄存器,需要时钟驱动,即引脚11(SCK)每产生一个上升沿,SER上的数据往移位寄存器送入一位,先送低位,后送高位,经过8个上升沿后,8bit全部送入移位寄存器了。
3、将移位寄存器里的数据送入存储寄存器,引脚12(STCP)产生一个上升沿后,该操作就完成了。
4、引脚13(G)为低电平,则步骤3送入存储寄存器的8bit数据(一个字节)就在Q7-Q0并行输出,并输出的数据会被所存起来。
注意:数据并行输出后,只要没有数据更新进来,原输出的数据保持不变,就是所谓的锁存(数据被锁存住)。在完成步骤123后,只要步骤4还没使能,输出都是保持不变的(这里是有误的,输出不是保持不变,不使能,输出是呈高阻态),当OE一使能,新的数据就输出,覆盖旧输出。
5单片595串转并输出过程
最后以图片的形式简单描述将0x11并行输出的过程:
0x11转为二进制是 0001 0001,串转并过程如图
5单片595电路
74HC595的工作原理我们清楚知道要驱动595主要是控制5个引脚:引脚14(DS)、引脚11(SHCP)、引脚12(STCP)和引脚13(OE)。
以74HC595驱动8个LED灯为例设计一个简单电路:
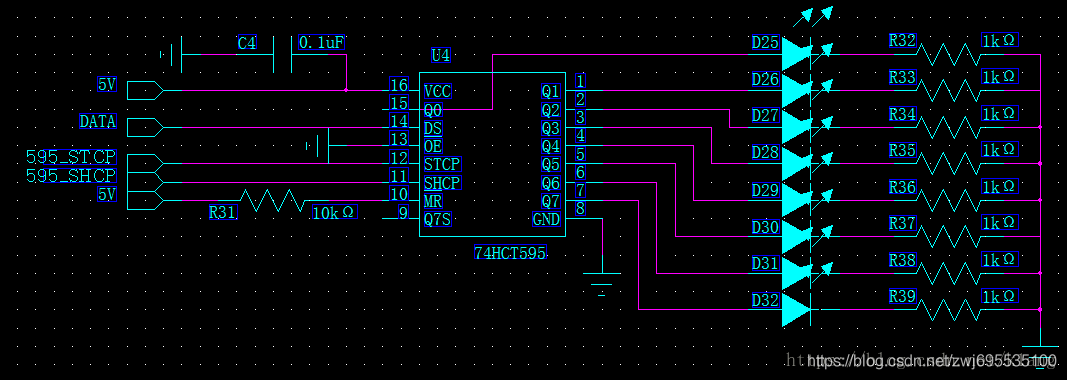
电源和地引脚就不用多说了,上5V,电源引脚加了个0.1uF的去耦电容。
这个电路中,我把引脚13直接接地,芯片是一直处于输出使能的,引脚10接了个上拉电阻到5V,也就是主复位不使能,不使用复位功能。
引脚14、引脚11和引脚12可以连接到单片机的IO引脚,通过单片机编程来驱动74HC595,Q7-Q0连接需控制的负载,这里就是8个LED了。
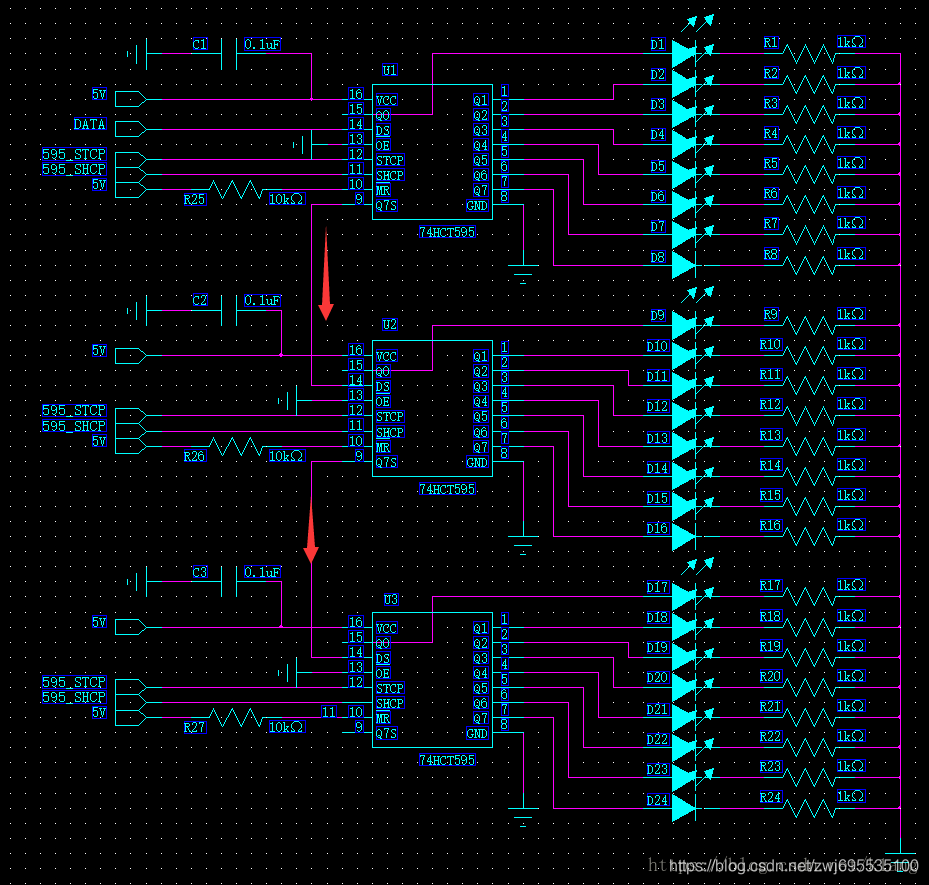
6 595级联电路
单个74HC595的电路就这样子了,是不是很简单?接下来说下595如何级联使用,我在datasheet中好像没看到最多级联个数,据说可以无限级联,我自己最多级联了4个。
74HC595的级联电路很简单,只需把前一个595的引脚9(Q7S)连接到下一个595的引脚14(DS)即可,如图所示:
74HC595的级联电路设计是不是很简单?为什么这样子就可以实现级联呢?
在前一篇文章也提到74HC595是串行输入,串行/并行输出的,级联就用到这个串行输出了,也就是引脚9,通过引脚9把数据传到下一级595的引脚14(DS),根据图3来说下级联数据传送的原理。
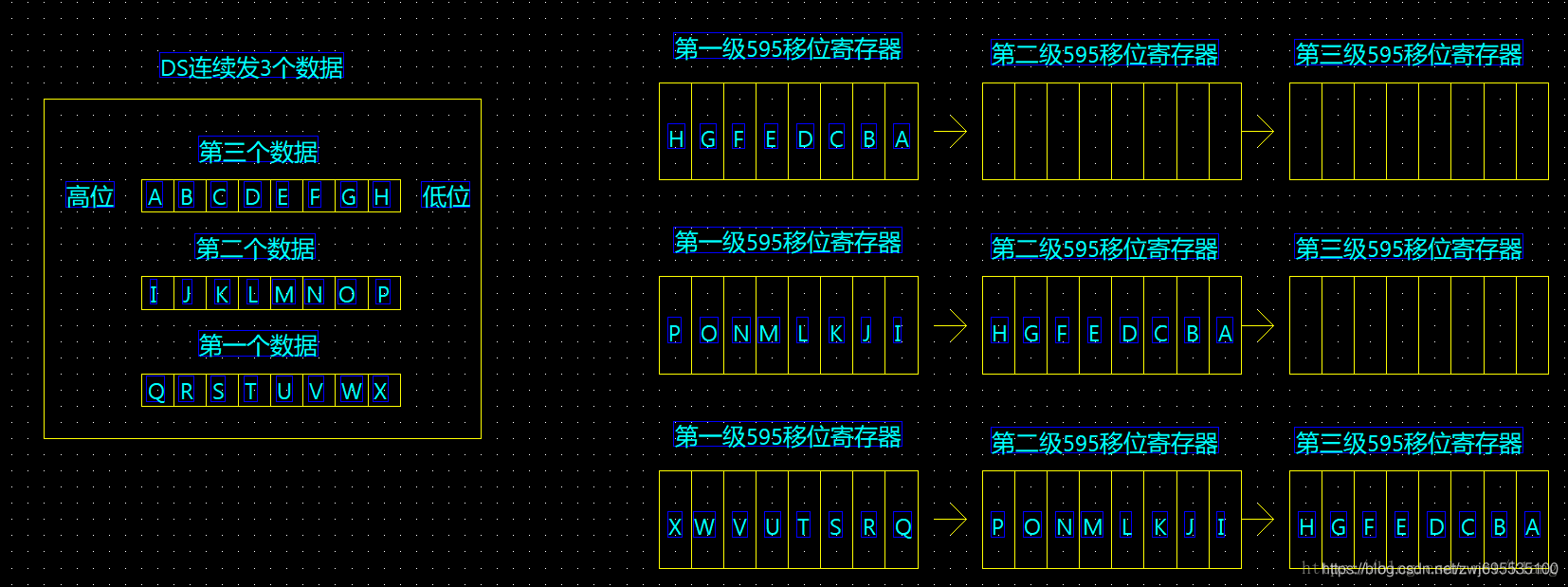
假如往第一级的595连续发三个字节数据:ABCD EFGH、IJKLP MNOP、QRST UVWX,第一个字节ABCD EFGH先进入第一级595移位寄存器;
当第二个数据IJKLP MNOP到来时,也往第一级595移位寄存器移,而第一个字节就会被挤出到第二个移位寄存器;
当第三个数据QRST UVWX到来时,也往第一级移位寄存器移,第二个字节就被挤出到第二级移位寄存器移,而一个字节就被挤出到第三级移位寄存器移;
由于OE引脚一直低电平,所以当STCP产生上升沿后,这三个字节就并行输出了。
注意:由于级联数据是被挤出到下一级的,所以先发送的数据最后是到最后一级595的。
好了,74HC595的电路设计就说到这里,下一篇595文章会讲一下stm32分别用IO模拟时序和SPI总线两种方式控制595控制595实现流水灯的功能。
7 74HC595级联电路编程(模拟IO口控制)
前面两篇文章已详细分析过74HC595的工作原理,接下来讲下用stm32去驱动两片74HC595控制16个LED实现流水灯效果。
这篇的代码是用IO模拟74HC595时序驱动的,下一篇文章,我们介绍下如何用SPI来驱动。直接贴上代码分析,代码很简单,每个语句的注释都说得很清楚了。。。。。。
开发平台:MDK5.14
MCU:STM32F103ZET6
74HC595头文件
#ifndef __595_H
#define __595_H
#include "stm32f10x.h"
#define SHCP_GPIO_PORT GPIOB
#define SHCP_GPIO_CLK RCC_APB2Periph_GPIOB
#define SHCP_GPIO_PIN GPIO_Pin_13
#define STCP_GPIO_PORT GPIOB
#define STCP_GPIO_CLK RCC_APB2Periph_GPIOB
#define STCP_GPIO_PIN GPIO_Pin_12
#define DS_GPIO_PORT GPIOB
#define DS_GPIO_CLK RCC_APB2Periph_GPIOB
#define DS_GPIO_PIN GPIO_Pin_15
#define HC595_SHCP_Low() GPIO_ResetBits( SHCP_GPIO_PORT, SHCP_GPIO_PIN )
#define HC595_SHCP_High() GPIO_SetBits( SHCP_GPIO_PORT, SHCP_GPIO_PIN )
#define HC595_STCP_Low() GPIO_ResetBits( STCP_GPIO_PORT, STCP_GPIO_PIN )
#define HC595_STCP_High() GPIO_SetBits( STCP_GPIO_PORT, STCP_GPIO_PIN )
#define HC595_Data_Low() GPIO_ResetBits( DS_GPIO_PORT, DS_GPIO_PIN )
#define HC595_Data_High() GPIO_SetBits( DS_GPIO_PORT, DS_GPIO_PIN )
void HC595_GPIO_Config(void);
void HC595_Send_Byte(u8 byte);
void HC595_CS(void);
void HC595_Send_Multi_Byte(u8 *data, u16 len);
#endif
74HC595驱动程序,说白了就是往74HC595发送数据
#include "595.h"
#include "spi.h"
void delay(uint16_t t);
/******** 74HC595 GPIO 配置 *************************/
void HC595_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( SHCP_GPIO_CLK | STCP_GPIO_CLK | DS_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Pin = SHCP_GPIO_PIN;
GPIO_Init(SHCP_GPIO_PORT, &GPIO_InitStructure); // 初始化 SHCP 引脚
GPIO_InitStructure.GPIO_Pin = STCP_GPIO_PIN;
GPIO_Init(STCP_GPIO_PORT, &GPIO_InitStructure); // 初始化 STCP 引脚
GPIO_InitStructure.GPIO_Pin = DS_GPIO_PIN;
GPIO_Init(DS_GPIO_PORT, &GPIO_InitStructure); // 初始化 DS 引脚
//GPIO_ResetBits(SHCP_GPIO_PORT, SHCP_GPIO_PIN); // 引脚初始状态为高,便于产生上升沿
GPIO_ResetBits(SHCP_GPIO_PORT, SHCP_GPIO_PIN); // 引脚初始状态为低,便于产生上升沿
GPIO_ResetBits(STCP_GPIO_PORT, STCP_GPIO_PIN);
GPIO_ResetBits(DS_GPIO_PORT, DS_GPIO_PIN);
}
/***
*74HC595 发送一个字节
*即往74HC595的DS引脚发送一个字节
*/
void HC595_Send_Byte(u8 byte)
{
u8 i;
for (i = 0; i < 8; i ++) //一个字节8位,传输8次,一次一位,循环8次,刚好移完8位
{
/**** 步骤1:将数据传到DS引脚 ****/
if (byte & 0x80) //先传输高位,通过与运算判断第八是否为1
HC595_Data_High(); //如果第八位是1,则与 595 DS连接的引脚输出高电平
else //否则输出低电平
HC595_Data_Low();
/*** 步骤2:SHCP每产生一个上升沿,当前的bit就被送入移位寄存器 ***/
HC595_SHCP_Low(); // SHCP拉低
delay(1); // 适当延时
HC595_SHCP_High(); // SHCP拉高, SHCP产生上升沿
delay(1);
byte <<= 1; // 左移一位,将低位往高位移,通过 if (byte & 0x80)判断低位是否为1
}
}
/**
*74HC595输出锁存 使能
**/
void HC595_CS(void)
{
/** 步骤3:STCP产生一个上升沿,移位寄存器的数据移入存储寄存器 **/
HC595_STCP_Low(); // 将STCP拉低
delay(1); // 适当延时
HC595_STCP_High(); // 再将STCP拉高,STCP即可产生一个上升沿
delay(1);
}
/**
*发送多个字节
*便于级联时数据的发送
*级联N级,就需要发送N个字节控制HC595
***/
void HC595_Send_Multi_Byte(u8 *data, u16 len)
{
u8 i;
for (i = 0; i < len; i ++ ) // len 个字节
{
HC595_Send_Byte(data[i]);
}
HC595_CS(); //先把所有字节发送完,再使能输出
}
void delay(uint16_t t)
{
for (; t != 0; t --);
}
#include "stm32f10x.h"
//#include "spi.h"
#include "595.h"
#include "SysTick.h"
u8 pos; // led位置
u8 Led_Pos_Buf[2] = {0x00, 0x00}; //存储要发送的指令字节
//第pos个led亮:1 2 3 4 5 6 7 8
u8 Led[32] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, //控制第二级74HC595
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //第一级的led全灭
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //第二级的led全灭
0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};//控制第一级74HC595
int main(void)
{
// SPI_Config();
HC595_GPIO_Config();
SysTick_Init();
while(1)
{
for (pos = 0; pos < 16; pos ++) //第pos个灯,实现流水灯效果
{
SysTick_Delay_Ms(500); //延时500毫秒
Led_Pos_Buf[1] = Led[pos];//存放第一级74HC595数据,因为先进先出,所以第一级放在Led_Pos_Buf[1],而不是Led_Pos_Buf[0]
Led_Pos_Buf[0] = Led[pos+16]; //存放第二级74HC595的数据
HC595_Send_Multi_Byte(Led_Pos_Buf,2);//将当前数据发送到595
}
}
}
8 74HC595级联电路编程(SPI控制)
前一篇是讲用IO口模拟74HC595的时序来控制的,因为74HC595刚好也是串行输入的,所以直接用串行总线SPI来控制,大概说下电路的连接,SPI2的SCK引脚连接74HC595的SHCP引脚,SPI2的CS引脚连接74HC595的STCP引脚,SPI2的MOSI引脚连接74HC595的DS引脚,因为74HC595是没有数据返回给MCU的,所以SPI2的MISO引脚并不需要连接。
下面就把代码放上来,代码很简单,直接使用SPI发送数据就可以了。
开发平台:MDK5.14
MCU:STM32F103ZET6
SPI2头文件
#ifndef __SPI_H
#define __SPI_H
#include "stm32f10x.h"
/*SPI接口定义-开头****************************/
//#define SPIx SPI1
//#define SPI_APBxClock_FUN RCC_APB2PeriphClockCmd
//#define SPI_CLK RCC_APB2Periph_SPI1
#define SPIx SPI2
#define SPI_APBxClock_FUN RCC_APB1PeriphClockCmd
#define SPI_CLK RCC_APB1Periph_SPI2
//CS(NSS)引脚 片选选普通GPIO即可
#define SPI_CS_APBxClock_FUN RCC_APB2PeriphClockCmd
#define SPI_CS_CLK RCC_APB2Periph_GPIOB
#define SPI_CS_PORT GPIOB
#define SPI_CS_PIN GPIO_Pin_12
//SCK引脚
#define SPI_SCK_APBxClock_FUN RCC_APB2PeriphClockCmd
#define SPI_SCK_CLK RCC_APB2Periph_GPIOB
#define SPI_SCK_PORT GPIOB
#define SPI_SCK_PIN GPIO_Pin_13
//MISO引脚
#define SPI_MISO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define SPI_MISO_CLK RCC_APB2Periph_GPIOB
#define SPI_MISO_PORT GPIOB
#define SPI_MISO_PIN GPIO_Pin_14
//MOSI引脚
#define SPI_MOSI_APBxClock_FUN RCC_APB2PeriphClockCmd
#define SPI_MOSI_CLK RCC_APB2Periph_GPIOB
#define SPI_MOSI_PORT GPIOB
#define SPI_MOSI_PIN GPIO_Pin_15
#define SPI_CS_LOW() GPIO_ResetBits( SPI_CS_PORT, SPI_CS_PIN )
#define SPI_CS_HIGH() GPIO_SetBits( SPI_CS_PORT, SPI_CS_PIN )
/*SPI接口定义-结尾****************************/
void SPI_Config(void);
u8 SPI_Read_Send_Byte(u8 byte);
u16 SPI_Read_Send_HalfWord(u16 HalfWord);
void SPI_Send_Byte(u8 byte);
void SPI_Send_Multi_Byte(u8 *data, u16 len);
#endif /* __SPI_H */
SPI2
#include "spi.h"
/**
* @brief SPI_FLASH初始化
* @param 无
* @retval 无
*/
void SPI_Config(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能SPI时钟 */
SPI_APBxClock_FUN ( SPI_CLK, ENABLE );
/* 使能SPI引脚相关的时钟 */
SPI_CS_APBxClock_FUN ( SPI_CS_CLK|SPI_SCK_CLK|SPI_MISO_PIN|SPI_MOSI_PIN, ENABLE );
/* 配置SPI的 CS引脚,普通IO即可 */
GPIO_InitStructure.GPIO_Pin = SPI_CS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(SPI_CS_PORT, &GPIO_InitStructure);
/* 配置SPI的 SCK引脚*/
GPIO_InitStructure.GPIO_Pin = SPI_SCK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_SCK_PORT, &GPIO_InitStructure);
/* 配置SPI的 MISO引脚*/
GPIO_InitStructure.GPIO_Pin = SPI_MISO_PIN;
GPIO_Init(SPI_MISO_PORT, &GPIO_InitStructure);
/* 配置SPI的 MOSI引脚*/
GPIO_InitStructure.GPIO_Pin = SPI_MOSI_PIN;
GPIO_Init(SPI_MOSI_PORT, &GPIO_InitStructure);
/* 停止信号CS引脚高电平*/
SPI_CS_HIGH();
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPIx , &SPI_InitStructure);
SPI_Cmd(SPIx , ENABLE);
}
u8 SPI_Read_Send_Byte(u8 byte)
{
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPIx , byte);
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPIx);
}
u16 SPI_Read_Send_HalfWord(u16 HalfWord)
{
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPIx , HalfWord);
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPIx );
}
// 在驱动74HC595只需要SPI的发送函数,并没用到读取函数
void SPI_Send_Byte(u8 byte) //发送一个字节
{
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_TXE) == RESET){}
SPI_I2S_SendData(SPIx , byte);
while (SPI_I2S_GetFlagStatus(SPIx , SPI_I2S_FLAG_RXNE) == RESET);
SPI_I2S_ReceiveData(SPIx);
}
void SPI_Send_Multi_Byte(u8 *data, u16 len) //连续发送 len 个字节
{
u8 i;
SPI_CS_LOW();
for (i = 0; i < len; i ++ )
{
SPI_Send_Byte(data[i]);
}
SPI_CS_HIGH(); // STCP产生上升沿
}
/*********************************************END OF FILE**********************/
主函数
#include "stm32f10x.h"
#include "spi.h"
//#include "595.h"
#include "SysTick.h"
u8 pos; // led位置
u8 Led_Pos_Buf[2] = {0x00, 0x00}; //存储要发送的指令字节
//第pos个led亮:1 2 3 4 5 6 7 8
u8 Led[32] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, //控制第二级74HC595
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //第一级的led全灭
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, //第二级的led全灭
0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};//控制第一级74HC595
int main(void)
{
SPI_Config();
// HC595_GPIO_Config();
SysTick_Init();
while(1)
{
for (pos = 0; pos < 16; pos ++) //第pos个灯,实现流水灯效果
{
SysTick_Delay_Ms(500); //延时500毫秒
Led_Pos_Buf[1] = Led[pos]; //存放第一级74HC595的数据,因为先进先出,所以第一级放在Led_Pos_Buf[1],而不是Led_Pos_Buf[0]
Led_Pos_Buf[0] = Led[pos+16]; //存放第二级74HC595的数据
SPI_Send_Multi_Byte(Led_Pos_Buf,2);//将当前数据发送到595
}
}
}
参考文献:
https://blog.csdn.net/k1ang/article/details/80012686
https://blog.csdn.net/k1ang/article/details/80012463
参考设计图:

![bert中 [CLS] 和 [SEP]怎么使用](/images/no-images.jpg)