- 只做学习记录,侵删原文链接
@article{peng2023energy,
title={Energy Harvesting Reconfigurable Intelligent Surface for UAV Based on Robust Deep Reinforcement Learning},
author={Peng, Haoran and Wang, Li-Chun},
journal={IEEE Transactions on Wireless Communications},
year={2023},
publisher={IEEE}
}
《Energy Harvesting Reconfigurable Intelligent Surface for UAV Based on Robust Deep Reinforcement Learning》基于鲁棒强化学习的无人机能量采集可重构智能表面 IEEE Transactions on Wireless Communications一区
- 论文背景
- 研究目标
- 系统模型
- 通信模型
- 优化函数
- 算法设计
论文背景
研究目标
- RIS每一个反射单元都由无源器件电容、电阻等构成,能耗小、成本低,能单独对信号进行反射。
- UAV在动态密集的户外活动,如马拉松、音乐会等,提供按需通信服务有巨大潜力。
- 缺点:
- RIS:静态部署,当服务覆盖范围中只有少量用户终端(UT)时,使用所有反射阵列进行信号传输可能导致资源浪费。
- UAV:临时基站(BS)、辅助物联网(IoT),增强热点覆盖,但电池容量限制。
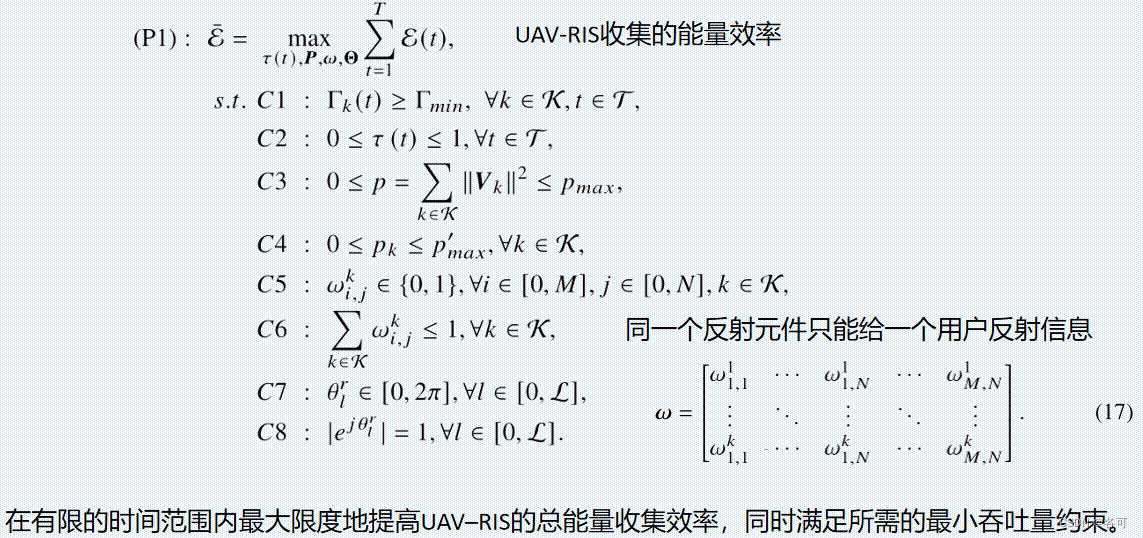
- 目标 :这项工作是使无人机和智能反射面结合,旨在在有限的时间范围内最大限度地提高UAV–RIS的总能量收集效率,同时满足用户所需的最小吞吐量约束
系统模型
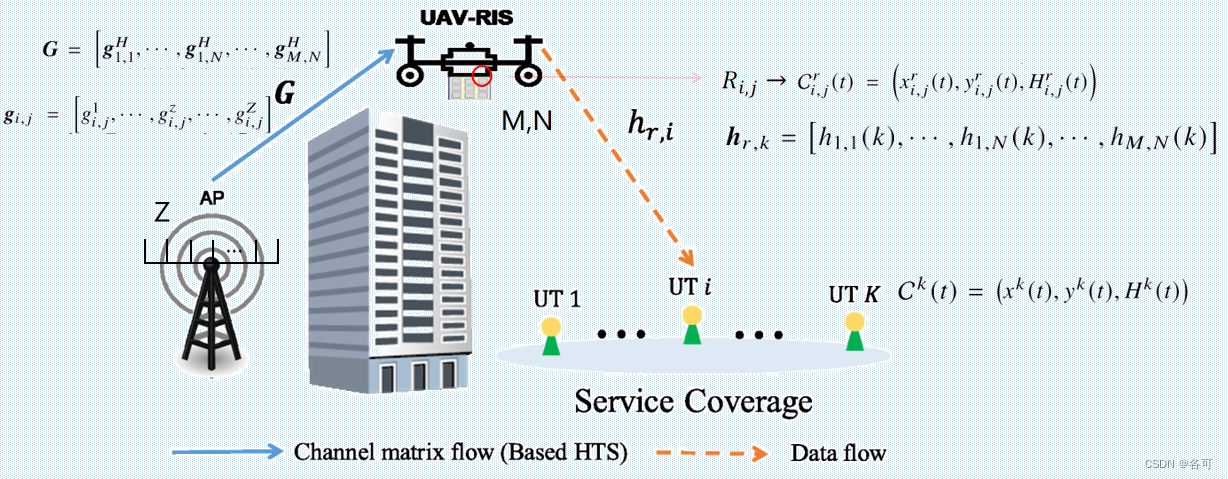

- 两个维度
- 只考虑时间:分为两个阶段
(1)能量传输阶段(2)信号传递阶段 - 考虑时间和空间
(1)能量传输阶段(2)信号传递阶段:在该阶段还考虑智能反射面哪些反射元件用于能量收集。
- 只考虑时间:分为两个阶段
通信模型
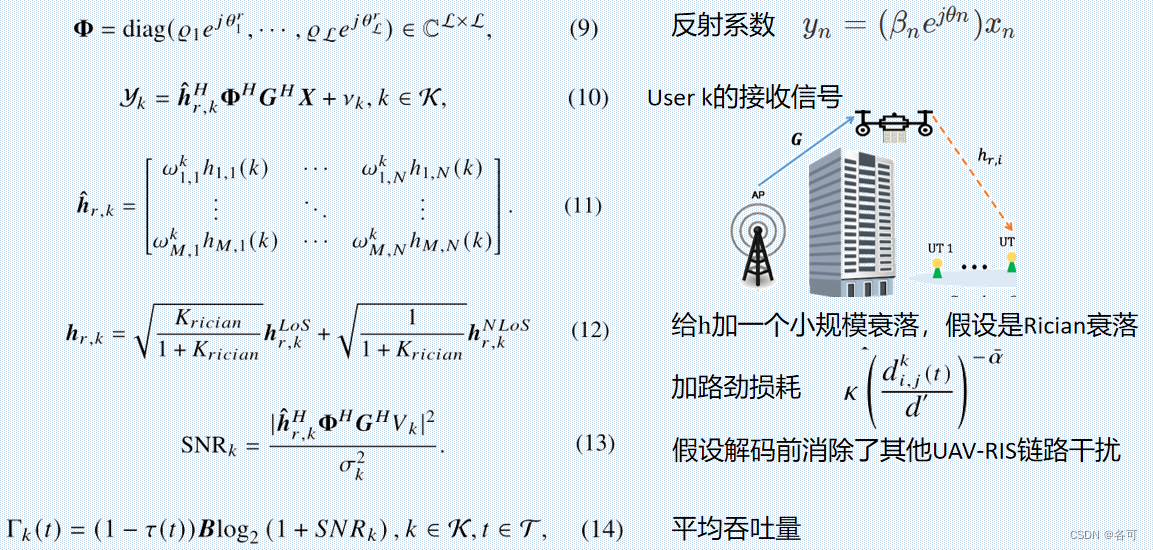
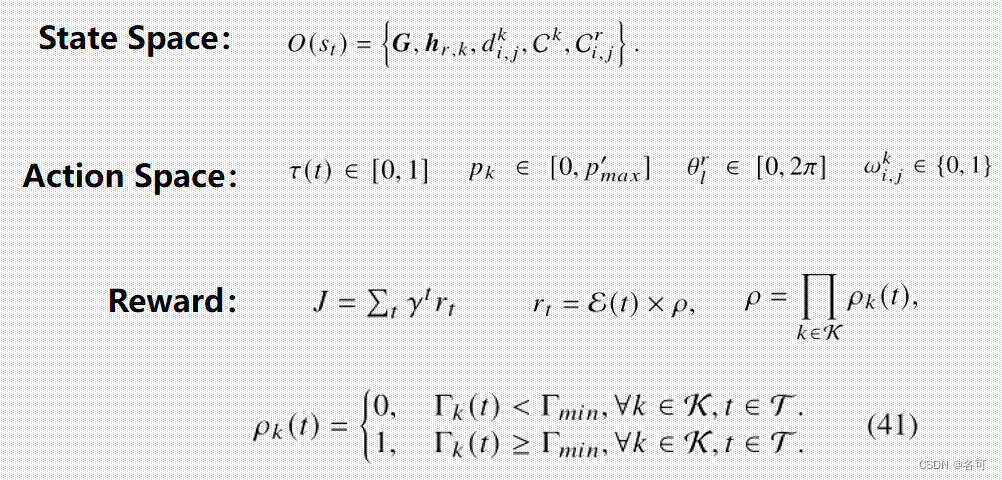
优化函数
下图中只写出了时空两个维度的,单一时间维度的类似。

算法设计
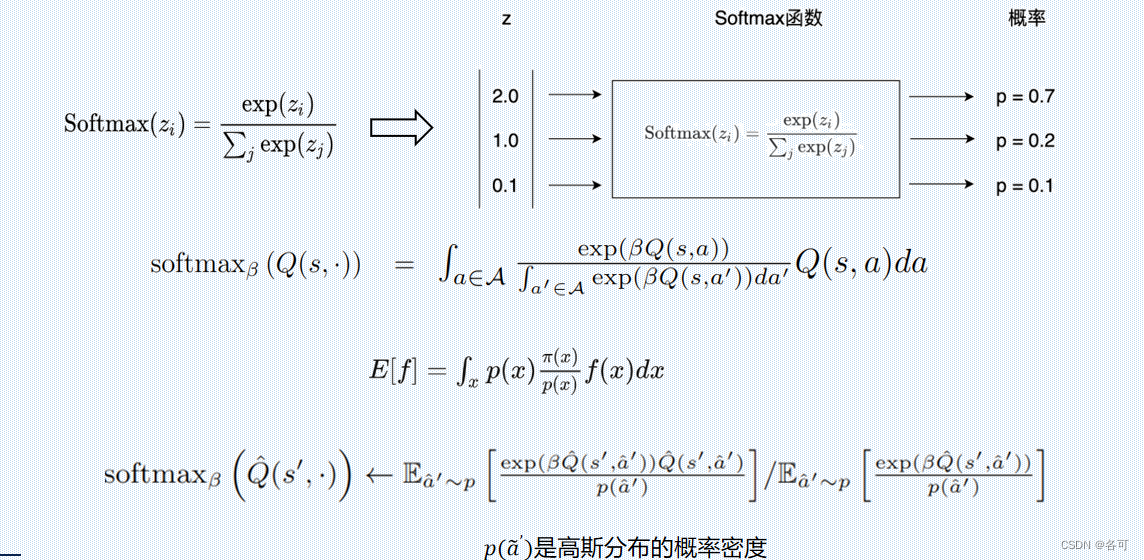
本文使用到强化学习的SD3算法,该算法是TD3算法的优化(求Q值引入Softmax),下图对比了TD3算法和DDPG算法,并简单列出了SD3算法的推导过程。
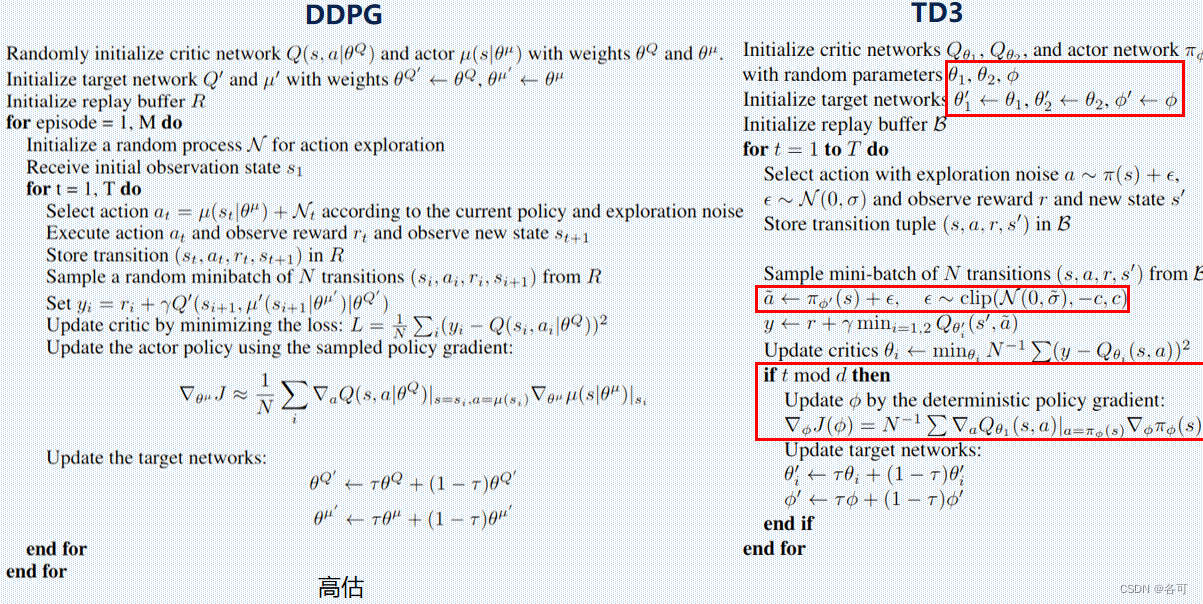
- TD3改善DDPG高估的问题。
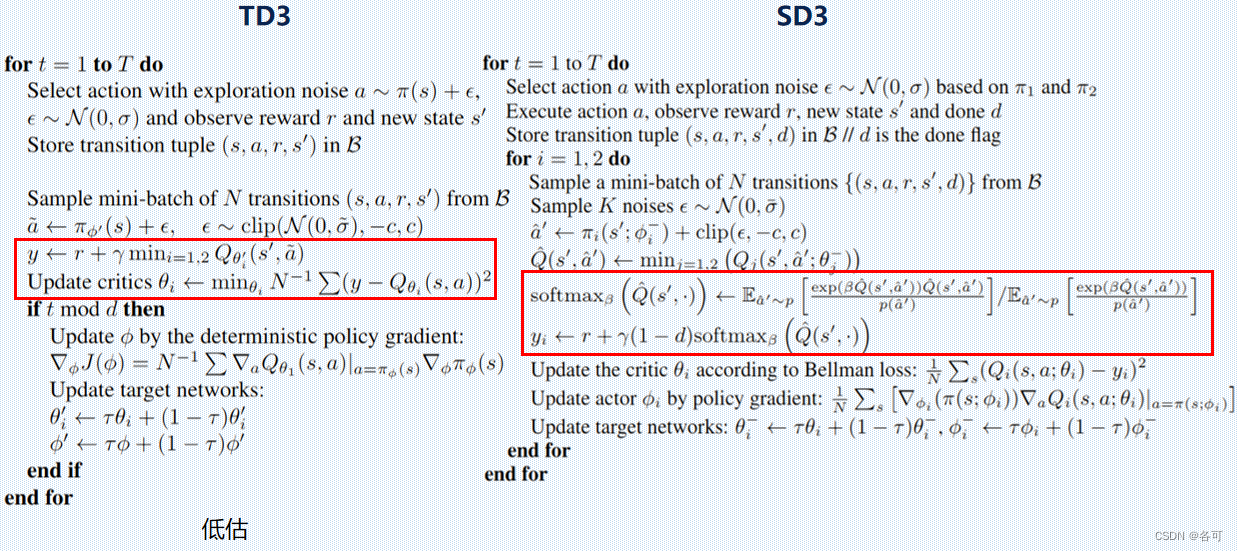
- SD3算法改善TD3算法的低估问题。推导过程如下(其中为便于计算机求解原算法将积分问题使用了重要性采样):
- 马尔科夫元组个元素。
实验部分不在此是赘述,感兴趣可以阅读原文。