对抗样本的基本概念
要认识对抗训练,首先要了解"对抗样本",它首先出现在论文Intriguing properties of neural networks之中。简单来说,它是指对于人类来说"看起来"几乎一样,但对于模型来说预测结果却完全不一样的样本,比如下面的经典例子(一只熊猫加了点扰动就被识别成了长臂猿)

那么,什么样的样本才是好的对抗样本呢?对抗样本一般需要具有两个特点:
- 相对原始输入,所添加的扰动是微小的
- 能使模型犯错
对抗训练的基本概念
GAN之父lan Goodfellow在15年的ICLR中第一次提出了对抗训练的概念,简言之,就是在原始输入样本xxx上加一个扰动Δx\Delta xΔx,得到对抗样本之后,用其进行训练。也就是说,问题可以被抽象成这样一个模型:
maxθP(y∣x+Δx;θ)\begin{aligned} \max_{\theta} P(y|x+\Delta x;\theta) \end{aligned} θmaxP(y∣x+Δx;θ)
其中,yyy为ground truth,θ\thetaθ为模型参数。那扰动Δx\Delta xΔx如何计算呢?Goodfellow认为:神经网络由于其线性的特点,很容易受到线性扰动的攻击
This linear behavior suggests that cheap, analytical perturbations of a linear model should also damage neural networks
于是,他提出了Fast Gradinet Sign Method(FGSM),来计算输入样本的扰动。扰动可以被定义为:
Δx=ϵ⋅sgn(∇xL(x,y;θ))\Delta x = \epsilon \cdot \text{sgn}(\nabla_x L(x, y;\theta)) Δx=ϵ⋅sgn(∇xL(x,y;θ))
其中,sgn\text{sgn}sgn为符号函数,LLL为损失函数(很多地方也用JJJ来表示)。Goodfellow发现,ϵ=0.25\epsilon=0.25ϵ=0.25时,这个扰动能给一个单层分类器造成99.9%的错误率。看似这个扰动的发现有点拍脑门,但仔细想想,其实这个扰动计算的思想可以理解为:将输入样本想着损失上升的方向再进一步,得到的对抗样本就能造成更大的损失,提高模型的错误率
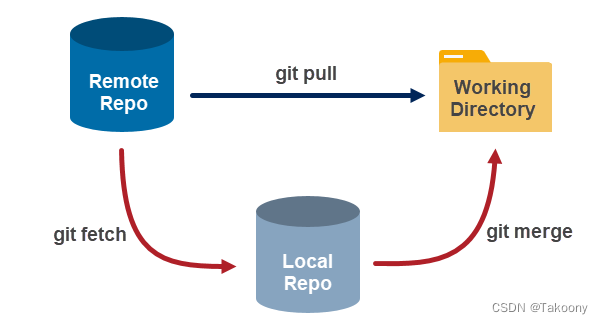
为了帮助读者理解上面一段话的含义,我们首先回顾一下梯度下降:在神经网络中,为了使得降低模型的损失,我们有这么一个简单的式子:
KaTeX parse error: Expected '}', got '_' at position 11: \text{new_̲weights = old_w…
如果要我指出其中最重要的部分,那必然是减号。这个减号使得无论当前梯度gradients是正还是负,最终new_weights的前进方向必然是使得loss下降的方向。那么反过来,如果将减号改为加号,并且将weights改为xxx,对抗训练中使得损失上升的思想就出来了
x=x+Δxx = x + \Delta x x=x+Δx

上图中,我们看到两个箭头代表了两种不同的梯度调整策略。左侧的方程是训练神经网络最常见方程,它朝着梯度下降、损失下降的方向前进。右侧的方程则不是这样,它朝着梯度上升、损失上升的方向前进
实际上公式中的sgn\text{sgn}sgn函数作用仅仅只是为了防止∇xL(x,y;θ)\nabla xL(x,y;\theta)∇xL(x,y;θ)过大所做的缩放,除了sgn\text{sgn}sgn函数以外,还有一种常见的方式是:
Δx=ϵ⋅∇xL(x,y;θ)∣∣∇xL(x,y;θ)∣∣\Delta x = \epsilon·\frac{\nabla_x L(x,y;\theta)}{||\nabla_xL(x,y;\theta)||} Δx=ϵ⋅∣∣∇xL(x,y;θ)∣∣∇xL(x,y;θ)
最后,Goodfellow还总结了对抗训练的两个作用:
- 提高模型应对恶意对抗样本时的鲁棒性
- 作为一种regularization,减少overfitting,提高泛化能力
Min-Max公式
Madry在2018年的ICLR论文Towards Deep Learning Models Resistant to Adversarial Attacks中总结了之前的工作。总的来说,对抗训练可以统一写成如下格式:
minθE(x,y)∼D[maxΔx∈ΩL(x+Δx,y;θ)]\min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[\max_{\Delta x\in\Omega}L(x+\Delta x, y;\theta)\right] θminE(x,y)∼D[Δx∈ΩmaxL(x+Δx,y;θ)]
其中D\mathcal{D}D代表数据集,xxx代表输入,yyy代表标签,θ\thetaθ是模型参数,L(x,y;θ)L(x,y;\theta)L(x,y;θ)是单个样本的loss,Δx\Delta xΔx是扰动,Ω\OmegaΩ是扰动空间。这个式子可以分步理解如下:
- 往xxx里注入扰动Δx\Delta xΔx,Δx\Delta xΔx的目标是让L(x+Δx,y;θ)L(x+\Delta x, y;\theta)L(x+Δx,y;θ)越大越好,也就是说尽可能让现有模型的预测出错
- 当然Δx\Delta xΔx也不是无约束的,它不能太大,否则达不到"看起来几乎一样"的效果,所以Δx\Delta xΔx要满足一定的约束,常规的约束是∣∣Δx∣∣≤ϵ||\Delta x||\leq \epsilon∣∣Δx∣∣≤ϵ,其中ϵ\epsilonϵ是一个常数
- 每个样本都构造出对抗样本x+Δxx+\Delta xx+Δx之后,用(x+Δ,y)(x+\Delta,y)(x+Δ,y)作为数据去最小化loss来更新参数θ\thetaθ(梯度下降)
- 反复交替执行1、2、3步
从CV到NLP
对于CV领域的任务,上述对抗训练的流程可以顺利执行下来,因为图像可以视为普通的连续实数向量,Δx\Delta xΔx也是一个实数向量,因此x+Δxx+\Delta xx+Δx依然可以是有意义的图像。但NLP不一样,NLP的输入是文本,它本质上是one-hot向量,而两个不同的one-hot向量,其欧式距离恒为2\sqrt{2}2,因此对于理论上不存在什么"小扰动"
一个自然的想法是像论文Adversarial Training Methods for Semi-Supervised Text Classification一样,将扰动加到Embedding层
Because the set of high-dimensional one-hot vectors does not admit infinitesimal perturbation, we define the perturbation on continuous word embeddings instead of discrete word inputs.
这个思路在操作上没有问题,但问题是,扰动后的Embedding向量不一定能匹配上原来的Embedding向量表,这样一来对Embedding层的扰动就无法对应上真实的文本输入,这就不是真正意义上的对抗样本了,因为对抗样本依然能对应一个合理的原始输入
那么,在Embedding层做对抗扰动还有没有意义呢?有!实验结果显示,在很多任务中,在Embedding层进行对抗扰动能有效提高模型的性能
Fast Gradient Method(FGM)
上面提到,Goodfellow在15年的ICLR中提出了Fast Gradient Sign Method(FGSM),随后,在17年的ICLR中,Goodfellow对FGSM中计算扰动的部分做了一点简单的修改。假设输入文本序列的Embedding vectors [v1,v2,...,vT][v_1,v_2,...,v_T][v1,v2,...,vT]为xxx,Embedding的扰动为
Δx=ϵ⋅g∣∣g∣∣2g=∇xL(x,y;θ)\begin{aligned} \Delta x &= \epsilon · \frac{g}{||g||_2}\\ g &= \nabla_x L(x,y;\theta) \end{aligned} Δxg=ϵ⋅∣∣g∣∣2g=∇xL(x,y;θ)
实际上就是取消了符号函数,用二范式做了一个scale,需要注意的是:这里的norm计算的是,每个样本的输入序列中出现过的词组成的矩阵的梯度norm。原作者提供了一个TensorFlow的实现,在他的实现中,公式里的xxx是Embedding后的结果(batch_size, seq_len, hid_dim),对其梯度ggg的后面两维计算norm,得到的是一个维度为(batch_size, 1, 1)的向量∣∣g∣∣2||g||_2∣∣g∣∣2。为了实现插件式的调用,笔者将一个batch抽象成一个样本,一个batch统一用一个norm,其实norm本来也只是一个缩放的作用,影响不大。实现如下:
class FGM():def __init__(self, model):self.model = modelself.backup = {}def attack(self, epsilon=1., emb_name='emb'):# emb_name这个参数要换成你模型中embedding的参数名# 例如,self.emb = nn.Embedding(5000, 100)for name, param in self.model.named_parameters():if param.requires_grad and emb_name in name:self.backup[name] = param.data.clone()norm = torch.norm(param.grad) # 默认为2范数if norm != 0:r_at = epsilon * param.grad / normparam.data.add_(r_at)def restore(self, emb_name='emb'):# emb_name这个参数要换成你模型中embedding的参数名for name, param in self.model.named_parameters():if param.requires_grad and emb_name in name: assert name in self.backupparam.data = self.backup[name]self.backup = {}
需要使用对抗训练的时候,只需要添加五行代码:
# 初始化
fgm = FGM(model)
for batch_input, batch_label in data:# 正常训练loss = model(batch_input, batch_label)loss.backward() # 反向传播,得到正常的grad# 对抗训练fgm.attack() # embedding被修改了# optimizer.zero_grad() # 如果不想累加梯度,就把这里的注释取消loss_sum = model(batch_input, batch_label)loss_sum.backward() # 反向传播,在正常的grad基础上,累加对抗训练的梯度fgm.restore() # 恢复Embedding的参数# 梯度下降,更新参数optimizer.step()optimizer.zero_grad()
Projected Gradient Descent(PGD)
FGM的思路是梯度上升,本质上来说没有什么问题,但是FGM简单粗暴的"一步到位"是不是有可能并不能走到约束内的最优点呢?当然是有可能的。于是,一个新的想法诞生了,Madry在18年的ICLR中提出了Projected Gradient Descent(PGD)方法,简单的说,就是"小步走,多走几步",如果走出了扰动半径为ϵ\epsilonϵ的空间,就重新映射回"球面"上,以保证扰动不要过大:
xt+1=∏x+S(xt+αg(xt)∣∣g(xt)∣∣2)g(xt)=∇xtL(xt,y;θ)\begin{aligned} x_{t+1}&=\prod_{x+S}(x_t+\alpha\frac{g(x_t)}{||g(x_t)||_2})\\ g(x_t)&=\nabla_{x_t}L(x_t,y;\theta) \end{aligned} xt+1g(xt)=x+S∏(xt+α∣∣g(xt)∣∣2g(xt))=∇xtL(xt,y;θ)
其中S={r∈Rd:∣∣r∣∣2≤ϵ}S=\{r\in \mathbb{R}^d:||r||_2\leq \epsilon\}S={r∈Rd:∣∣r∣∣2≤ϵ}为扰动的约束空间,α\alphaα为小步的步长
由于PGD理论和代码比较复杂,因此下面先给出伪代码方便理解,然后再给出代码
对于每个x:1.计算x的前向loss,反向传播得到梯度并备份对于每步t:2.根据Embedding矩阵的梯度计算出r,并加到当前Embedding上,相当于x+r(超出范围则投影回epsilon内)3.t不是最后一步: 将梯度归0,根据(1)的x+r计算前后向并得到梯度4.t是最后一步: 恢复(1)的梯度,计算最后的x+r并将梯度累加到(1)上5.将Embedding恢复为(1)时的值6.根据(4)的梯度对参数进行更新
可以看到,在循环中rrr是逐渐累加的,要注意的是最后更新参数只使用最后一个x+r算出来的梯度
class PGD():def __init__(self, model):self.model = modelself.emb_backup = {}self.grad_backup = {}def attack(self, epsilon=1., alpha=0.3, emb_name='emb', is_first_attack=False):# emb_name这个参数要换成你模型中embedding的参数名for name, param in self.model.named_parameters():if param.requires_grad and emb_name in name:if is_first_attack:self.emb_backup[name] = param.data.clone()norm = torch.norm(param.grad)if norm != 0:r_at = alpha * param.grad / normparam.data.add_(r_at)param.data = self.project(name, param.data, epsilon)def restore(self, emb_name='emb'):# emb_name这个参数要换成你模型中embedding的参数名for name, param in self.model.named_parameters():if param.requires_grad and emb_name in name: assert name in self.emb_backupparam.data = self.emb_backup[name]self.emb_backup = {}def project(self, param_name, param_data, epsilon):r = param_data - self.emb_backup[param_name]if torch.norm(r) > epsilon:r = epsilon * r / torch.norm(r)return self.emb_backup[param_name] + rdef backup_grad(self):for name, param in self.model.named_parameters():if param.requires_grad:self.grad_backup[name] = param.grad.clone()def restore_grad(self):for name, param in self.model.named_parameters():if param.requires_grad:param.grad = self.grad_backup[name]
使用的时候要麻烦一点:
pgd = PGD(model)
K = 3
for batch_input, batch_label in data:# 正常训练loss = model(batch_input, batch_label)loss.backward() # 反向传播,得到正常的gradpgd.backup_grad() # 保存正常的grad# 对抗训练for t in range(K):pgd.attack(is_first_attack=(t==0)) # 在embedding上添加对抗扰动, first attack时备份param.dataif t != K-1:optimizer.zero_grad()else:pgd.restore_grad() # 恢复正常的gradloss_sum = model(batch_input, batch_label)loss_sum.backward() # 反向传播,并在正常的grad基础上,累加对抗训练的梯度pgd.restore() # 恢复embedding参数# 梯度下降,更新参数optimizer.step()optimizer.zero_grad()
Virtual Adversarial Training
除了监督任务,对抗训练还可以用在半监督任务中,尤其对于NLP任务来说,很多时候我们拥有大量的未标注文本,那么就可以参考Distributional Smoothing with Virtual Adversarial Training进行半监督训练
首先,抽取一个随机标准正态扰动(d∼N(0,1)∈Rd)(d\sim \mathcal{N}(0, 1) \in \mathbb{R}^d)(d∼N(0,1)∈Rd),加到Embedding上,并用KL散度计算梯度:
g=∇x′DKL(p(⋅∣x;θ)∣∣p(⋅∣x′;θ))x′=x+ξd\begin{aligned} g &= \nabla_{x'} D_{KL}(p(·\mid x;\theta)||p(·\mid x';\theta))\\ x' &= x + \xi d \end{aligned} gx′=∇x′DKL(p(⋅∣x;θ)∣∣p(⋅∣x′;θ))=x+ξd
然后,用得到的梯度,计算对抗扰动,并进行对抗训练:
minθDKL(p(⋅∣x;θ)∣∣p(⋅∣x∗;θ))x∗=x+ϵg∣∣g∣∣2\begin{aligned} \min_\theta & D_{KL}(p(\cdot|x;\theta)||p(\cdot|x^*;\theta)) \\\\ x^* &= x+\epsilon \frac{g}{||g||_2} \end{aligned} θminx∗DKL(p(⋅∣x;θ)∣∣p(⋅∣x∗;θ))=x+ϵ∣∣g∣∣2g
实现起来有很多细节,并且笔者对于NLP的半监督任务了解并不多,因此这里就不给出实现了
实验对照
为了说明对抗训练的作用,网上有位大佬选了四个GLUE中的任务进行了对照试验,实验代码使用的Huggingface的transformers/examples/run_glue.py,超参都是默认的,对抗训练用的也是相同的超参
| 任务 | Metrics | BERT-Base | FGM | PGD |
|---|---|---|---|---|
| MRPC | Accuracy | 83.6 | 86.8 | 85.8 |
| CoLA | Matthew’s corr | 56.0 | 56.0 | 56.8 |
| STS-B | Person/Spearmean corr | 89.3/88.8 | 89.3/88.8 | 89.3/88.8 |
| RTE | Accuracy | 64.3 | 66.8 | 64.6 |
可以看出,对抗训练还是有效的,在MRPC和RTE任务上甚至可以提高三四个百分点。不过,根据我们使用的经验来看,是否有效有时也取决于数据集
为什么对抗训练有效?
Adversarial Training 能够提升 Word Embedding 质量的一个原因是:
有些词与比如(good 和 bad),其在语句中 Grammatical Role 是相近的,我理解为词性相同(都是形容词),并且周围一并出现的词语也是相近的,比如我们经常用来修饰天气或者一天的情况(The weather is good/bad; It’s a good/bad day),这些词的 Word Embedding 是非常相近的。文章中用 Good 和 Bad 作为例子,找出了其最接近的 10 个词:

可以发现在 Baseline 和 Random 的情况下, good 和 bad 出现在了彼此的邻近词中,而喂给模型经过扰动之后的 X-adv 之后,也就是 Adversarial 这一列,这种现象就没有出现,事实上, good 掉到了 bad 接近程度排第 36 的位置
我们可以猜测,在 Word Embedding 上添加的 Perturbation 很可能会导致原来的good变成bad,导致分类错误,计算的 Adversarial Loss 很大,而计算 Adversarial Loss 的部分是不参与梯度计算的,也就是说,模型(LSTM 和最后的 Dense Layer)的 Weight 和 Bias 的改变并不会影响 Adversarial Loss,模型只能通过改变 Word Embedding Weight 来努力降低它,进而如文章所说:
Adversarial training ensures that the meaning of a sentence cannot be inverted via a small change, so these words with similar grammatical role but different meaning become separated.
这些含义不同而语言结构角色类似的词能够通过这种 Adversarial Training 的方法而被分离开,从而提升了 Word Embedding 的质量,帮助模型取得了非常好的表现
梯度惩罚
这一部分,我们从另一个视角对上述结果进行分析,从而推出对抗训练的另一种方法,并且得到一种关于对抗训练更直观的几何理解
假设已经得到对抗扰动Δx\Delta xΔx,那么我们在更新θ\thetaθ时,考虑对L(x+Δx,y;θ)L(x+\Delta x,y;\theta)L(x+Δx,y;θ)的泰勒展开:
minθE(x,y)∼D[L(x+Δx,y;θ)]≈minθE(x,y)∼D[L(x,y;θ)+⟨∇xL(x,y;θ),Δx⟩]\begin{aligned} &\min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[L(x+\Delta x, y;\theta)\right]\\ \approx&\, \min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[L(x, y;\theta)+\langle\nabla_x L(x, y;\theta), \Delta x\rangle\right] \end{aligned} ≈θminE(x,y)∼D[L(x+Δx,y;θ)]θminE(x,y)∼D[L(x,y;θ)+⟨∇xL(x,y;θ),Δx⟩]
其中,⟨x,y⟩=x⋅y=xTy\langle x,y \rangle = x·y = x^Ty⟨x,y⟩=x⋅y=xTy
对应θ\thetaθ的梯度为
∇θL(x,y;θ)+⟨∇θ∇xL(x,y;θ),Δx⟩\nabla_{\theta} L(x,y;\theta)+\langle \nabla_{\theta}\nabla{x}L(x,y;\theta), \Delta x\rangle ∇θL(x,y;θ)+⟨∇θ∇xL(x,y;θ),Δx⟩
带入Δx=ϵ∇xL(x,y;θ)\Delta x = \epsilon \nabla_x L(x,y;\theta)Δx=ϵ∇xL(x,y;θ),得到
∇θL(x,y;θ)+ϵ⟨∇θ∇xL(x,y;θ),∇xL(x,y;θ)⟩=∇θ(L(x,y;θ)+12ϵ∥∇xL(x,y;θ)∥2)\begin{aligned}&\nabla_{\theta}L(x, y;\theta)+\epsilon\langle\nabla_{\theta}\nabla_x L(x, y;\theta), \nabla_x L(x, y;\theta)\rangle\\ =&\,\nabla_{\theta}\left(L(x, y;\theta)+\frac{1}{2}\epsilon\left\Vert\nabla_x L(x, y;\theta)\right\Vert^2\right) \end{aligned} =∇θL(x,y;θ)+ϵ⟨∇θ∇xL(x,y;θ),∇xL(x,y;θ)⟩∇θ(L(x,y;θ)+21ϵ∥∇xL(x,y;θ)∥2)
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ &\langle \frac…
这个结果表示,对输入样本施加ϵ∇xL(x,y;θ)\epsilon \nabla_x L(x,y;\theta)ϵ∇xL(x,y;θ)的对抗扰动,一定程度上等价于往loss里边加入**“梯度惩罚”**
12ϵ∣∣∇xL(x,y;θ)∣∣2\frac{1}{2}\epsilon ||\nabla_x L(x,y;\theta)||^2 21ϵ∣∣∇xL(x,y;θ)∣∣2
如果对抗扰动Δx=ϵ∇xL(x,y;θ)∣∣∇xL(x,y;θ∣∣\Delta x = \epsilon \frac{\nabla_x L(x,y;\theta)}{||\nabla_x L(x,y;\theta||}Δx=ϵ∣∣∇xL(x,y;θ∣∣∇xL(x,y;θ),那么对应的梯度惩罚项则是ϵ∣∣∇xL(x,y;θ)∣∣\epsilon ||\nabla_x L(x,y;\theta)||ϵ∣∣∇xL(x,y;θ)∣∣
总结
这篇博客梳理了NLP对抗训练发展的来龙去脉,介绍了对抗训练的数学定义,并对于两种经典的对抗训练方法,提供了插件式的实现,做了简单的实验对照。由于笔者接触对抗训练的时间也并不长,如果文中有理解偏差的地方,希望读者不吝指出。另外还有一些对抗训练算法,读者有兴趣可以查看一文搞懂NLP中的对抗训练以及对抗训练的理解,以及FGM、PGD和FreeLB的详细介绍这两篇文章
References
- Adversarial Attacks on Neural Networks: Exploring the Fast Gradient Sign Method
- 对抗训练浅谈:意义、方法和思考(附Keras实现)
- 功守道:NLP中的对抗训练 + PyTorch实现
- 一文搞懂NLP中的对抗训练
- 关于 Adversarial Training 在 NLP 领域的一些思考