文章目录
- 定时器外部脉冲计数功能
- 程序实现
- TIM1 定时一秒钟中断
- TIM2 外部脉冲计数配置
- TIM3 PWM产生
- 总程序
定时器外部脉冲计数功能
两种方法用于在单片机中实现频率计的功能。
第一种方法是通过定时器来衡量信号的周期,然后将周期转换为频率。在这种方法中,你可以使用单片机的定时器模块来测量输入信号的周期,定时器会产生一个计数值,你可以根据这个计数值来推算出输入信号的周期,并通过简单的数学运算将周期转换为频率。【定时器捕获功能】
第二种方法是统计一定时间内脉冲的个数。在这种方法中,你可以使用单片机的输入捕获功能来记录输入脉冲的次数。通过在一段固定的时间内记录脉冲的个数,然后将脉冲个数除以时间,就可以得到频率值。【定时器外部脉冲计数功能】
本文使用第二种,【定时器外部脉冲计数功能】。
程序实现
TIM1 定时一秒钟中断
这里有篇博客介绍:
https://qq742971636.blog.csdn.net/article/details/131387700
TIM2 外部脉冲计数配置
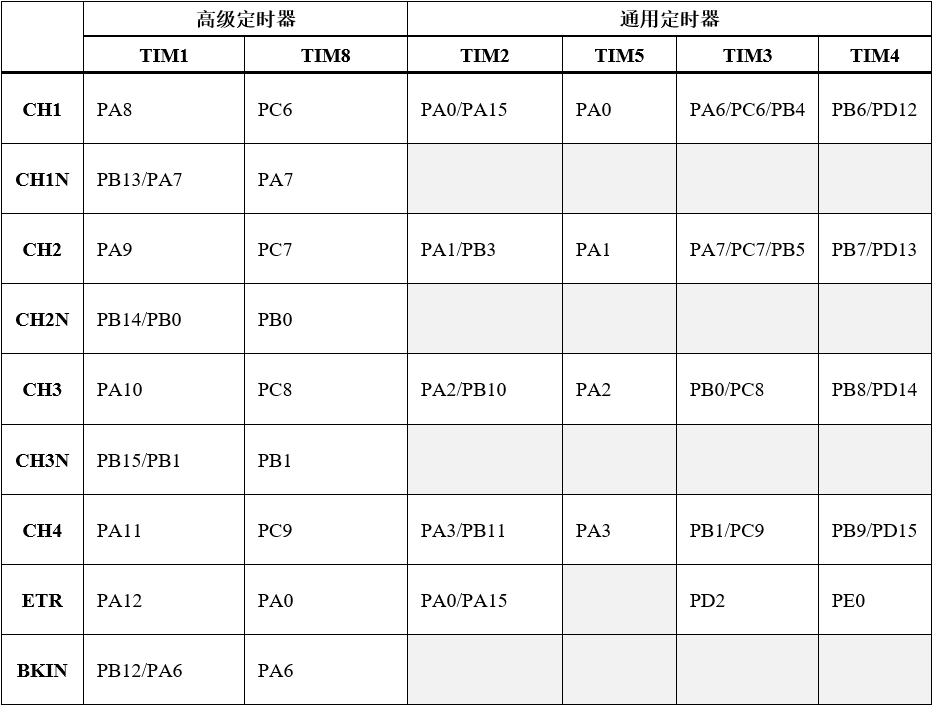
首先,通过RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE)和RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE)使能了TIM2和GPIOA的时钟。
然后,使用GPIO_InitStructure结构体对GPIOA的Pin 0进行配置,设置为输入模式(GPIO_Mode_IPD)并设置为下拉模式。这样可以确保输入信号的稳定性。
接着,初始化定时器TIM2。设置计数器自动重装值为0xFFFF,表示计数器将在达到该值后重新装载。预分频器被设为0,时钟分割被设置为TIM_CKD_DIV1,即不分割时钟。计数模式被设置为向上计数模式(TIM_CounterMode_Up)。最后通过TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure)函数进行初始化。
使用TIM_ITRxExternalClockConfig(TIM2,TIM_TS_ETRF)配置外部触发模式,这样定时器才能根据外部脉冲信号进行计数。
使用TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0)配置外部触发源的细节,包括设置分频系数、极性等。这里的参数都是一些默认值。
通过TIM_SetCounter(TIM2, 0)将计数器的初始值设置为0。
最后,使用TIM_Cmd(TIM2, ENABLE)使能定时器。
TIM3 PWM产生
这里有篇博客介绍:
https://qq742971636.blog.csdn.net/article/details/131445707
总程序
将TIM3_CH1 PWM引脚PA6接上外部脉冲计数引脚TIM2_CH1 PA0,电脑接收串口0的输出,即可看到打印出的频率数值。
#include "sys.h"
#include "usart.h"long freq = 0;//频率
long freq_cnt = 0;void TIM2_Cap_Init(u16 arr, u16 psc) //配置 TIM2_CH1_ETR 为外部脉冲计数
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能TIM2时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前设置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_ResetBits(GPIOA, GPIO_Pin_0); //PA0 下拉//初始化定时器2 TIM2TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值TIM_TimeBaseStructure.TIM_Prescaler = psc; //预分频器TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_ITRxExternalClockConfig(TIM2, TIM_TS_ETRF); //配置外部触发,否则不会计数TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);TIM_SetCounter(TIM2, 0);//中断优先级NVIC设置NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器TIM_Cmd(TIM2, ENABLE); //使能定时器
}void TIM2_UP_IRQHandler(void) //TIM2中断
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //溢出中断{TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除中断标志freq_cnt++; //freq_cnt加1}
}//初始化定时器为中断触发
void TIM1_Init(u16 arr, u16 psc) {TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //时钟使能//定时器TIM1初始化TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE); //使能指定的TIM3中断,允许更新中断//中断优先级NVIC设置NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM1中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1}/* 定时器1中断服务程序 */
void TIM1_UP_IRQHandler(void) /* TIM1中断 */
{if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) /* 检查TIM1更新中断发生与否 */{TIM_ClearITPendingBit(TIM1, TIM_IT_Update); /* 清除TIM1更新中断标志 */freq = freq_cnt * 0XFFFF + TIM_GetCounter(TIM2); //读取单位时间内计数器计的CNT值printf("%ld Hz \r\n", freq);//打印频率freq = 0;freq_cnt = 0;TIM_SetCounter(TIM2, 0);}
}//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr, u16 psc) {GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟//设置该引脚为复用输出功能GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //TIM3_CH1 TIM3_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; //TIM3_CH3 TIM3_CH4GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO//初始化TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式3TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC3Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC3TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式4TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC4Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC4TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR1上的预装载寄存器TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR3上的预装载寄存器TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR4上的预装载寄存器TIM_Cmd(TIM3, ENABLE); //使能TIM3
}int main(void) {NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); /* 设置NVIC中断分组2:2位抢占优先级,2位响应优先级 */delay_init(); /* 延时函数初始化 */RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); /* 关闭jtag,使能SWD,可以用SWD模式调试 */delay_ms(500); /* 等待稳定 */uart_init(115200);TIM1_Init(10000 - 1, 7200 - 1);//1s一次中断TIM2_Cap_Init(0XFFFF, 0); //定时器2初始化TIM3_PWM_Init(7200, 0); /* 10KHz PWM PA6 */TIM_SetCompare1(TIM3, 3600);TIM_SetCompare2(TIM3, 3600);TIM_SetCompare3(TIM3, 3600);TIM_SetCompare4(TIM3, 3600);while (1) {}
}10KHz PWM PA6 接到TIM2 PA0。


