相关文章

奇瑞a3中控按键图解_奇瑞A3空调三个键中间键是如何使用?
展开全部 奇瑞A3空调e68a843231313335323631343130323136353331333431363665三个键中间键是用于调节风量的。发动机上的空气过滤器是为了过滤发动机运转所需要的空气,在汽油发动机上都有此装置,在玩车人看来,原车所安装的空气过滤器似有进气量…

激光雷达在机器人中的避障方案
如今,在各种商用场景中服务机器人已屡见不鲜,对于一些在餐厅、酒店等地的服务机器人来说,往往会面临应用环境复杂多变的情况,这就对机器人的避障能力提出了很大的挑战,避障是指移动机器人根据采集的障碍物的状态信息&a…
![[A3C]:算法原理详解](https://img-blog.csdnimg.cn/20200529171527190.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3N5YzEyMjA=,size_16,color_FFFFFF,t_70)
[A3C]:算法原理详解
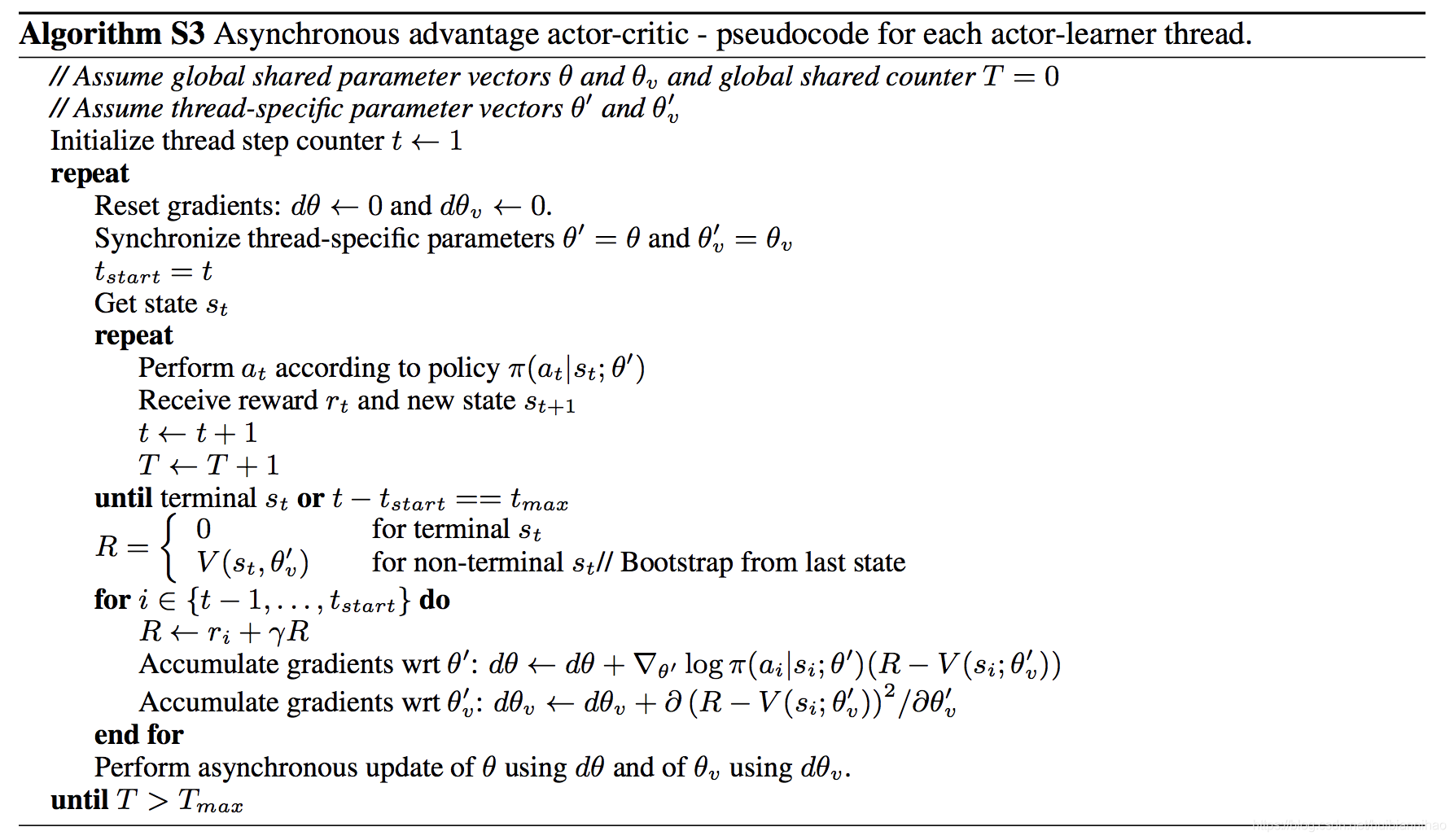
强化学习: A3C算法原理
深度强化学习框架使用异步梯度下降来优化深度神经网络控制器。提出了四种标准强化学习算法的异步变体,并证明并行actor-learners在训练中具有稳定作用,使得四种方法都能成功地训练神经网络控制器。首先明确什么是A3C?…
激光雷达RPLIDAR A1使用教程
激光雷达RPLIDAR A1使用教程
一.雷达硬件连接
1.A1雷达包含组件
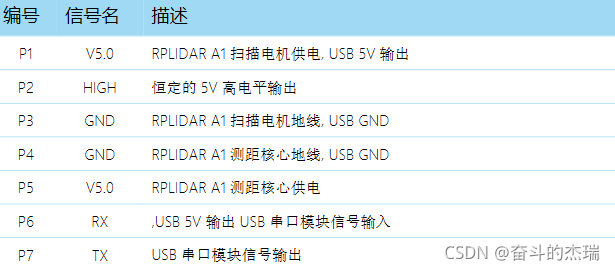
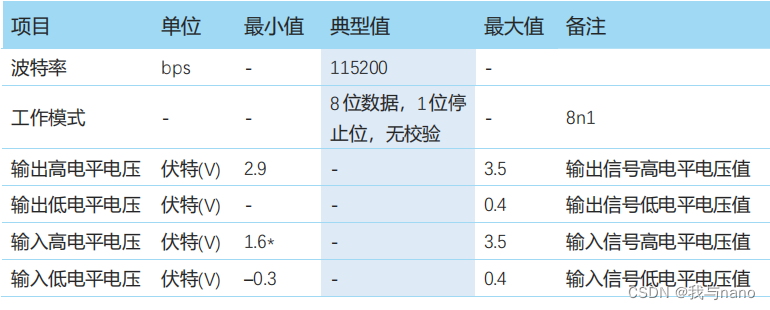
RPLIDAR A1开发套装包含了如下组件: o RPLIDAR A1模组(内置 PWM电机驱动器) o USB适配器 o RPLIDAR A1模组通讯排线 注意:另需自备 USB线缆用于连接。
2.A1雷达…

STM32c8t6驱动激光雷达(一)
思岚A1激光雷达
前言
先来了解激光雷达 RPLIDAR A1M8 360 度激光扫描测距雷达是由 SLAMTEC 公司开发的低成本二维激光雷达(LIDAR)解决方案。它可以实现在二维平面的 12 米半径范围内进行 360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。这些云地图…
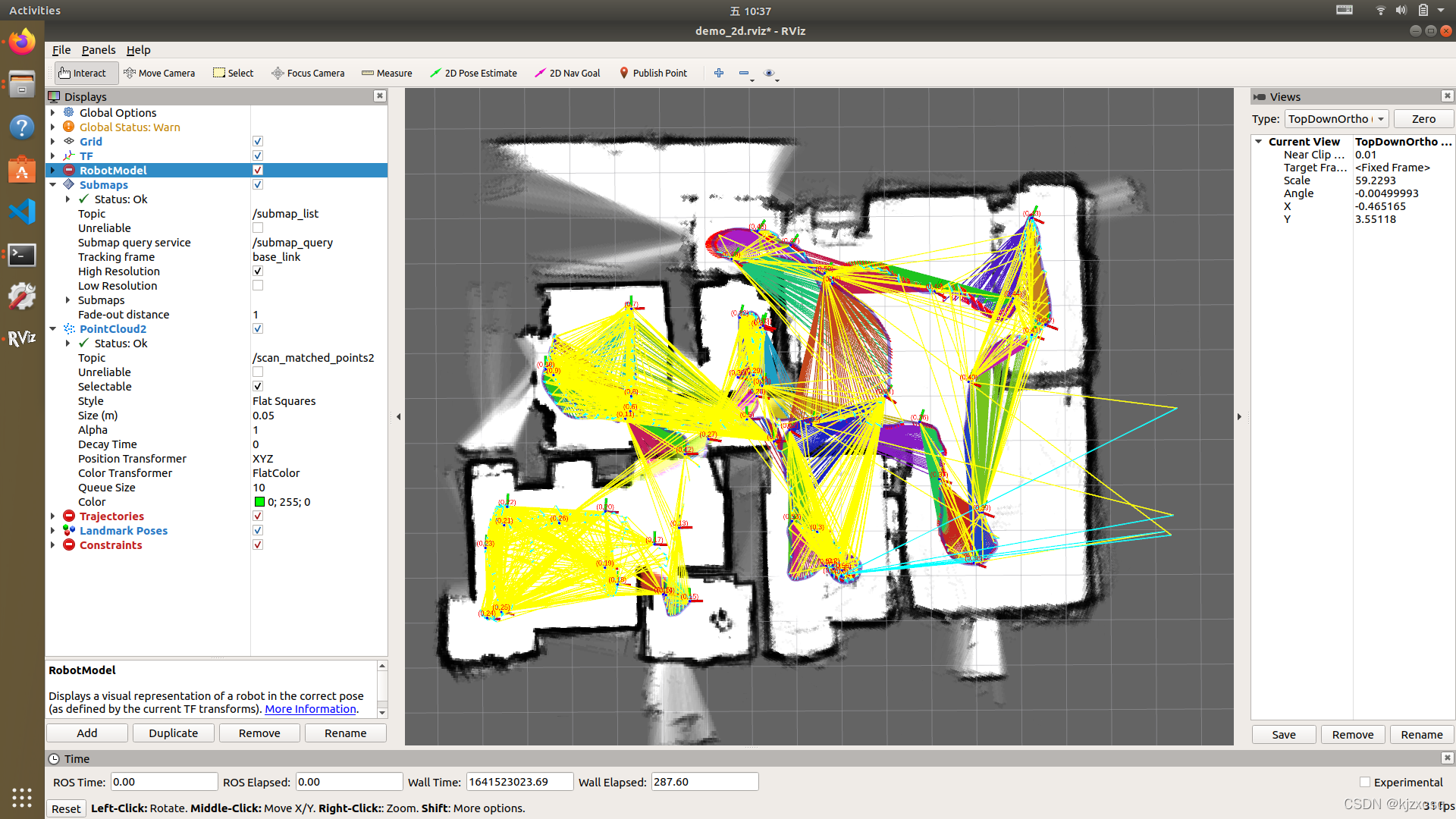
思岚激光雷达+cartographer建图
系统环境:
Ubuntu18.04
ROS Melodic
gcc 7.5.0
1.安装思岚ROS包
1.1 clone并编译
cd catkin_ws/src/
git clone https://github.com/Slamtec/rplidar_ros.git
cd ..
catkin_make1.2 修改rplidar_ros/launch/rplidar.launch中的波特率 1.3 试一下效果
source …
并行强化学习算法:A2C/A3C
目录
背景介绍
A3C模型
A3C损失函数
A3C学习过程
A2C
总结 背景介绍
在DQN中,为了保证数据的有效性,采用了 Experience Replay Memory机制: 但是这种机制,存在几个问题:1,会占据大块的内存ÿ…