1、权重衰退
1. 基础概念
实际上,限制特征的数量是缓解过拟合的一种常用技术。然而,简单地丢弃特征对这项工作来说可能过于生硬。我们继续思考多项式回归的例子,考虑高维输入可能发生的情况。多项式对多变量数据的自然扩展称为单项式(monomials),也可以说是变量幂的乘积。单项式的阶数是幂的和。
例如, x 1 2 x 2 x_1^2 x_2 x12x2和 x 3 x 5 2 x_3 x_5^2 x3x52都是3次单项式。注意,随着阶数 d d d的增长,带有阶数 d d d的项数迅速增加。 给定 k k k个变量,阶数为 d d d的项的个数为 ( k − 1 + d k − 1 ) {k - 1 + d} \choose {k - 1} (k−1k−1+d),即 C k − 1 + d k − 1 = ( k − 1 + d ) ! ( d ) ! ( k − 1 ) ! C^{k-1}_{k-1+d} = \frac{(k-1+d)!}{(d)!(k-1)!} Ck−1+dk−1=(d)!(k−1)!(k−1+d)!。因此即使是阶数上的微小变化,比如从 2 2 2到 3 3 3,也会显著增加我们模型的复杂性。仅仅通过简单的限制特征数量(在多项式回归中体现为限制阶数),可能仍然使模型在过简单和过复杂中徘徊,我们需要一个更细粒度的工具来调整函数的复杂性,使其达到一个合适的平衡位置。
我们已经描述了 L 2 L_2 L2范数和 L 1 L_1 L1范数,它们是更为一般的 L p L_p Lp范数的特殊情况。在训练参数化机器学习模型时,权重衰减(weight decay)是最广泛使用的正则化的技术之一,它通常也被称为 L 2 L_2 L2正则化。
这项技术通过函数与零的距离来衡量函数的复杂度,因为在所有函数 f f f中,函数 f = 0 f = 0 f=0(所有输入都得到值 0 0 0)在某种意义上是最简单的。但是我们应该如何精确地测量一个函数和零之间的距离呢?没有一个正确的答案。事实上,函数分析和巴拿赫空间理论的研究,都在致力于回答这个问题。
一种简单的方法是通过线性函数 f ( x ) = w ⊤ x f(\mathbf{x}) = \mathbf{w}^\top \mathbf{x} f(x)=w⊤x中的权重向量的某个范数来度量其复杂性,例如 ∥ w ∥ 2 \| \mathbf{w} \|^2 ∥w∥2。要保证权重向量比较小,最常用方法是将其范数作为惩罚项加到最小化损失的问题中。将原来的训练目标 最小化训练标签上的预测损失,调整为最小化预测损失和惩罚项之和。 现在,如果我们的权重向量增长的太大,我们的学习算法可能会更集中于最小化权重范数 ∥ w ∥ 2 \| \mathbf{w} \|^2 ∥w∥2。这正是我们想要的。让我们回顾一下性回归例子。我们的损失由下式给出:
L ( w , b ) = 1 n ∑ i = 1 n 1 2 ( w ⊤ x ( i ) + b − y ( i ) ) 2 . L(\mathbf{w}, b) = \frac{1}{n}\sum_{i=1}^n \frac{1}{2}\left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right)^2. L(w,b)=n1i=1∑n21(w⊤x(i)+b−y(i))2.
回想一下, x ( i ) \mathbf{x}^{(i)} x(i)是样本 i i i的特征, y ( i ) y^{(i)} y(i)是样本 i i i的标签, ( w , b ) (\mathbf{w}, b) (w,b)是权重和偏置参数。为了惩罚权重向量的大小,
我们必须以某种方式在损失函数中添加 ∥ w ∥ 2 \| \mathbf{w} \|^2 ∥w∥2,但是模型应该如何平衡这个新的额外惩罚的损失?实际上,我们通过正则化常数 λ \lambda λ来描述这种权衡,这是一个非负超参数,我们使用验证数据拟合:
L ( w , b ) + λ 2 ∥ w ∥ 2 , L(\mathbf{w}, b) + \frac{\lambda}{2} \|\mathbf{w}\|^2, L(w,b)+2λ∥w∥2,
对于 λ = 0 \lambda = 0 λ=0,我们恢复了原来的损失函数。对于 λ > 0 \lambda > 0 λ>0,我们限制 ∥ w ∥ \| \mathbf{w} \| ∥w∥的大小。
这里我们仍然除以 2 2 2:当我们取一个二次函数的导数时, 2 2 2和 1 / 2 1/2 1/2会抵消,以确保更新表达式看起来既漂亮又简单。为什么在这里我们使用平方范数而不是标准范数(即欧几里得距离)?我们这样做是为了便于计算。 通过平方 L 2 L_2 L2范数,我们去掉平方根,留下权重向量每个分量的平方和。这使得惩罚的导数很容易计算:导数的和等于和的导数。
此外,为什么我们首先使用 L 2 L_2 L2范数,而不是 L 1 L_1 L1范数。事实上,这个选择在整个统计领域中都是有效的和受欢迎的。 L 2 L_2 L2正则化线性模型构成经典的岭回归(ridge regression)算法, L 1 L_1 L1正则化线性回归是统计学中类似的基本模型,通常被称为套索回归(lasso regression)。 使用 L 2 L_2 L2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚。这使得我们的学习算法偏向于在大量特征上均匀分布权重的模型。 在实践中,这可能使它们对单个变量中的观测误差更为稳定。相比之下, L 1 L_1 L1惩罚会导致模型将权重集中在一小部分特征上,而将其他权重清除为零。 这称为特征选择(feature selection),这可能是其他场景下需要的。
L 2 L_2 L2正则化回归的小批量随机梯度下降更新如下式:
w ← ( 1 − η λ ) w − η ∣ B ∣ ∑ i ∈ B x ( i ) ( w ⊤ x ( i ) + b − y ( i ) ) . \begin{aligned} \mathbf{w} & \leftarrow \left(1- \eta\lambda \right) \mathbf{w} - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \mathbf{x}^{(i)} \left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right). \end{aligned} w←(1−ηλ)w−∣B∣ηi∈B∑x(i)(w⊤x(i)+b−y(i)).
根据之前章节所讲的,我们根据估计值与观测值之间的差异来更新 w \mathbf{w} w。然而,我们同时也在试图将 w \mathbf{w} w的大小缩小到零。这就是为什么这种方法有时被称为权重衰减。我们仅考虑惩罚项,优化算法在训练的每一步衰减权重。与特征选择相比,权重衰减为我们提供了一种连续的机制来调整函数的复杂度。较小的 λ \lambda λ值对应较少约束的 w \mathbf{w} w,而较大的 λ \lambda λ值对 w \mathbf{w} w的约束更大。
是否对相应的偏置 b 2 b^2 b2进行惩罚在不同的实践中会有所不同,在神经网络的不同层中也会有所不同。通常,网络输出层的偏置项不会被正则化。
2. 代码演示
(1)生成数据
首先,我们[像以前一样生成一些数据],生成公式如下:
y = 0.05 + ∑ i = 1 d 0.01 x i + ϵ where ϵ ∼ N ( 0 , 0.0 1 2 ) . y = 0.05 + \sum_{i = 1}^d 0.01 x_i + \epsilon \text{ where } \epsilon \sim \mathcal{N}(0, 0.01^2). y=0.05+i=1∑d0.01xi+ϵ where ϵ∼N(0,0.012).
我们选择标签是关于输入的线性函数。标签同时被均值为0,标准差为0.01高斯噪声破坏。
为了使过拟合的效果更加明显,我们可以将问题的维数增加到 d = 200 d = 200 d=200,并使用一个只包含20个样本的小训练集。
%matplotlib inline
import torch
from torch import nn
from d2l import torch as d2ln_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
train_data = d2l.synthetic_data(true_w, true_b, n_train)
train_iter = d2l.load_array(train_data, batch_size)
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
(2)初始化模型参数
def init_params():w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)b = torch.zeros(1, requires_grad=True)return [w, b]
(3)定义惩罚项
def l2_penalty(w):return torch.sum(w.pow(2)) / 2
def l1_penalty(w):return torch.sum(torch.abs(w))
(4)训练
def train(lambd):w, b = init_params()net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_lossnum_epochs, lr = 100, 0.003animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',xlim=[5, num_epochs], legend=['train', 'test'])for epoch in range(num_epochs):for X, y in train_iter:# 增加了L2范数惩罚项,# 广播机制使l2_penalty(w)成为一个长度为batch_size的向量l = loss(net(X), y) + lambd * l2_penalty(w)# l = loss(net(X), y) + lambd * l1_penalty(w)l.sum().backward()d2l.sgd([w, b], lr, batch_size)if (epoch + 1) % 5 == 0:animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),d2l.evaluate_loss(net, test_iter, loss)))print('w的L2范数是:', torch.norm(w).item())不适用权重衰退
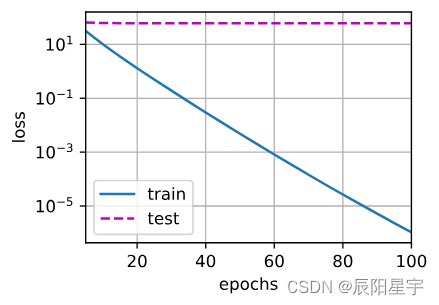
train(lambd=0)
使用权重衰退L2
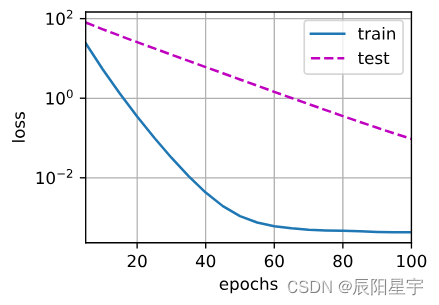
train(lambd=3)
使用权重衰退L1
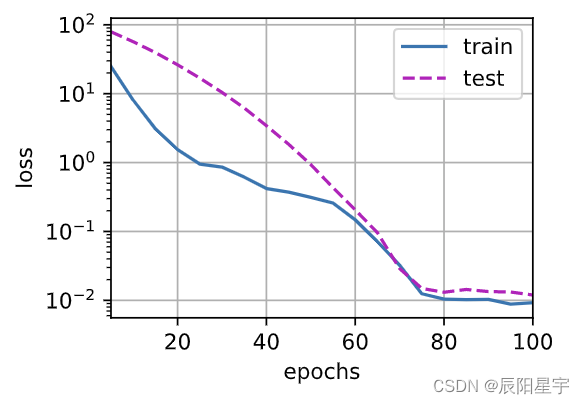
train(lambd=3)
参考文章:4.5. 权重衰减
2、丢弃法
1. 扰动性
我们介绍了通过惩罚权重的 L 2 L_2 L2范数来正则化统计模型的经典方法。 在概率角度看,我们可以通过以下论证来证明这一技术的合理性: 我们已经假设了一个先验,即权重的值取自均值为0的高斯分布。 更直观的是,我们希望模型深度挖掘特征,即将其权重分散到许多特征中, 而不是过于依赖少数潜在的虚假关联。
在探究泛化性之前,我们先来定义一下什么是一个“好”的预测模型?我们期待“好”的预测模型能在未知的数据上有很好的表现:经典泛化理论认为,为了缩小训练和测试性能之间的差距,应该以简单的模型为目标。简单性以较小维度的形式展现,我们在讨论线性模型的单项式函数时探讨了这一点。 此外,正如我们在中讨论权重衰减( L 2 L_2 L2正则化)时看到的那样,参数的范数也代表了一种有用的简单性度量。
简单性的另一个角度是平滑性,即函数不应该对其输入的微小变化敏感。例如,当我们对图像进行分类时,我们预计向像素添加一些随机噪声应该是基本无影响的。1995年,克里斯托弗·毕晓普证明了具有输入噪声的训练等价于Tikhonov正则化 :cite:Bishop.1995。这项工作用数学证实了**“要求函数光滑”和“要求函数对输入的随机噪声具有适应性”之间的联系**。
然后在2014年,斯里瓦斯塔瓦等人 :cite:Srivastava.Hinton.Krizhevsky.ea.2014就如何将毕晓普的想法应用于网络的内部层提出了一个想法:在训练过程中,他们建议在计算后续层之前向网络的每一层注入噪声。因为当训练一个有多层的深层网络时,注入噪声只会在输入-输出映射上增强平滑性。
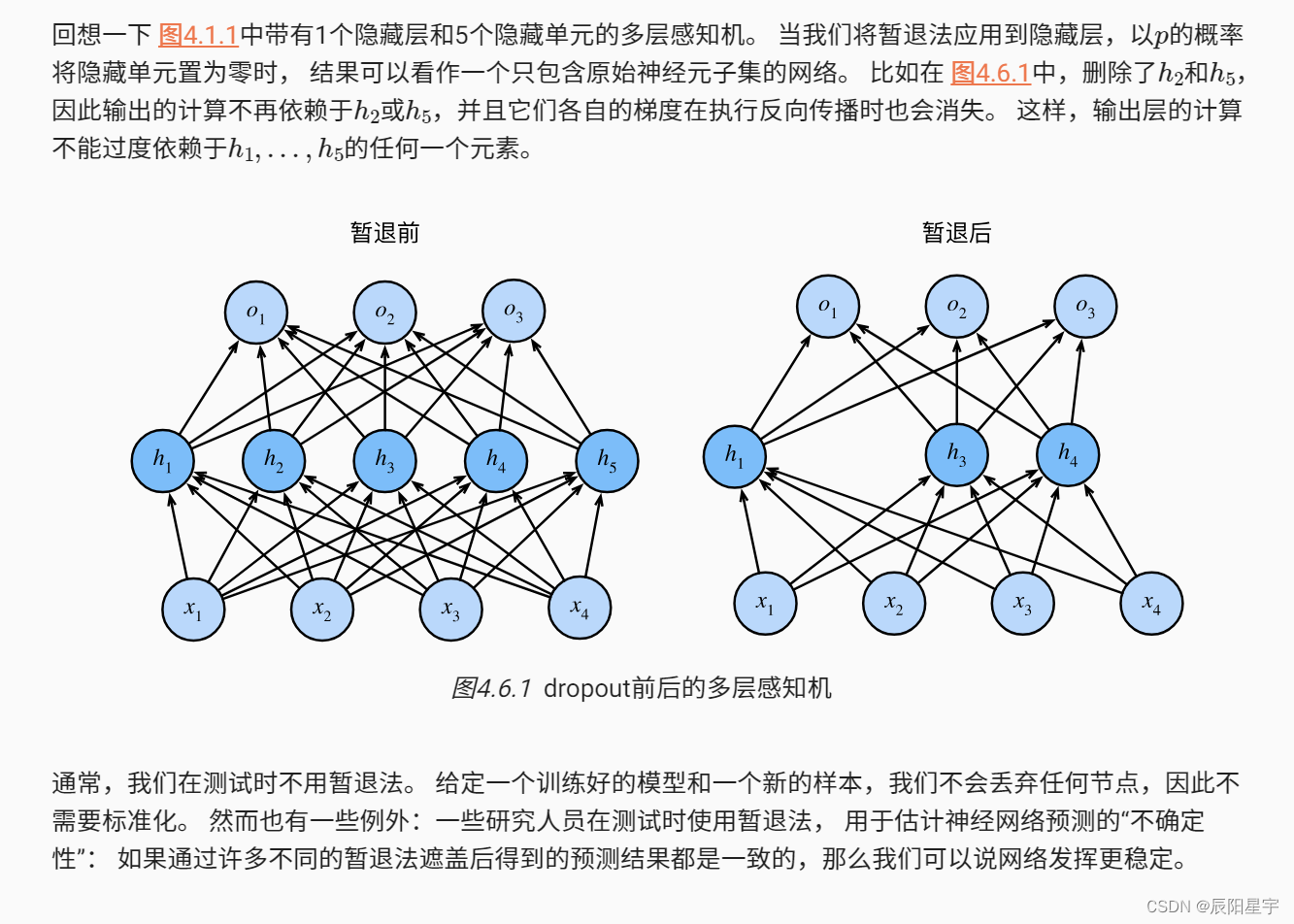
这个想法被称为暂退法(dropout)。暂退法在前向传播过程中,计算每一内部层的同时注入噪声,这已经成为训练神经网络的常用技术。这种方法之所以被称为暂退法,因为我们从表面上看是在训练过程中丢弃(drop out)一些神经元。在整个训练过程的每一次迭代中,标准暂退法包括在计算下一层之前将当前层中的一些节点置零。
需要说明的是,暂退法的原始论文提到了一个关于有性繁殖的类比:神经网络过拟合与每一层都依赖于前一层激活值相关,称这种情况为“共适应性”。作者认为,暂退法会破坏共适应性,就像有性生殖会破坏共适应的基因一样。
那么关键的挑战就是如何注入这种噪声。一种想法是以一种无偏向(unbiased)的方式注入噪声。
这样在固定住其他层时,每一层的期望值等于没有噪音时的值。
在毕晓普的工作中,他将高斯噪声添加到线性模型的输入中。在每次训练迭代中,他将从均值为零的分布 ϵ ∼ N ( 0 , σ 2 ) \epsilon \sim \mathcal{N}(0,\sigma^2) ϵ∼N(0,σ2)采样噪声添加到输入 x \mathbf{x} x,从而产生扰动点 x ′ = x + ϵ \mathbf{x}' = \mathbf{x} + \epsilon x′=x+ϵ,预期是 E [ x ′ ] = x E[\mathbf{x}'] = \mathbf{x} E[x′]=x。
在标准暂退法正则化中,通过按保留(未丢弃)的节点的分数进行规范化来消除每一层的偏差。
换言之,每个中间活性值 h h h以暂退概率 p p p由随机变量 h ′ h' h′替换,如下所示:
h ′ = { 0 概率为 p h 1 − p 其他情况 \begin{aligned} h' = \begin{cases} 0 & \text{ 概率为 } p \\ \frac{h}{1-p} & \text{ 其他情况} \end{cases} \end{aligned} h′={01−ph 概率为 p 其他情况
根据此模型的设计,其期望值保持不变,即 E [ h ′ ] = h E[h'] = h E[h′]=h。( E [ h ′ ] = p ∗ 0 + 1 − p ∗ h 1 − p E[h'] = p*0 + 1-p*\frac{h}{1-p} E[h′]=p∗0+1−p∗1−ph)这样子可以保证期望不变,让训练时候进行dropout,测试时候不进行dropout,同时可不需让训练时候神经网络层数翻倍。
2. 从零开始实现
要实现单层的暂退法函数,我们从均匀分布 U [ 0 , 1 ] U[0, 1] U[0,1]中抽取样本,样本数与这层神经网络的维度一致。然后我们保留那些对应样本大于 p p p的节点,把剩下的丢弃。
在下面的代码中,(我们实现 dropout_layer 函数,该函数以dropout的概率丢弃张量输入X中的元素),如上所述重新缩放剩余部分:将剩余部分除以1.0-dropout。
(1)dropout操作
import torch
from torch import nn
from d2l import torch as d2ldef dropout_layer(X, dropout):assert 0 <= dropout <= 1# 在本情况中,所有元素都被丢弃if dropout == 1:return torch.zeros_like(X)# 在本情况中,所有元素都被保留if dropout == 0:return Xmask = (torch.rand(X.shape) > dropout).float()return mask * X / (1.0 - dropout)
(1)torch.rand(X.shape) > dropout:大于dropout时候返回True,小于时候返回False。
(2)(torch.rand(X.shape) > dropout).float():再使用float(),将True和False分别变成0和1
(3)X * mask:代表选中或者不选中某一神经元
###(2)测试dropout操作
X= torch.arange(16, dtype = torch.float32).reshape((2, 8))
print(X)
print(dropout_layer(X, 0.))
print(dropout_layer(X, 0.5))
print(dropout_layer(X, 1.))tensor([[ 0., 1., 2., 3., 4., 5., 6., 7.],[ 8., 9., 10., 11., 12., 13., 14., 15.]])
tensor([[ 0., 1., 2., 3., 4., 5., 6., 7.],[ 8., 9., 10., 11., 12., 13., 14., 15.]])
tensor([[ 0., 0., 4., 0., 0., 10., 12., 0.],[16., 18., 20., 22., 0., 26., 0., 0.]])
tensor([[0., 0., 0., 0., 0., 0., 0., 0.],[0., 0., 0., 0., 0., 0., 0., 0.]])
(3)定义模型参数
同样,我们使用Fashion-MNIST数据集。 我们定义具有两个隐藏层的多层感知机,每个隐藏层包含256个单元。
num_inputs, num_outputs, num_hiddens1, num_hiddens2 = 784, 10, 256, 256
(4)定义模型
我们可以将暂退法应用于每个隐藏层的输出(在激活函数之后), 并且可以为每一层分别设置暂退概率: 常见的技巧是在靠近输入层的地方设置较低的暂退概率。 下面的模型将第一个和第二个隐藏层的暂退概率分别设置为0.2和0.5, 并且暂退法只在训练期间有效。
dropout1, dropout2 = 0.2, 0.5class Net(nn.Module):def __init__(self, num_inputs, num_outputs, num_hiddens1, num_hiddens2,is_training = True):super(Net, self).__init__()self.num_inputs = num_inputsself.training = is_trainingself.lin1 = nn.Linear(num_inputs, num_hiddens1)self.lin2 = nn.Linear(num_hiddens1, num_hiddens2)self.lin3 = nn.Linear(num_hiddens2, num_outputs)self.relu = nn.ReLU()def forward(self, X):H1 = self.relu(self.lin1(X.reshape((-1, self.num_inputs))))# 只有在训练模型时才使用dropoutif self.training == True:# 在第一个全连接层之后添加一个dropout层H1 = dropout_layer(H1, dropout1)H2 = self.relu(self.lin2(H1))if self.training == True:# 在第二个全连接层之后添加一个dropout层H2 = dropout_layer(H2, dropout2)out = self.lin3(H2)return outnet = Net(num_inputs, num_outputs, num_hiddens1, num_hiddens2)
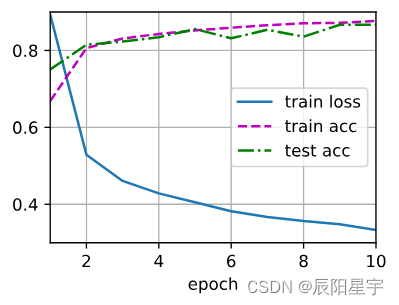
(5)训练和测试
num_epochs, lr, batch_size = 10, 0.5, 256
loss = nn.CrossEntropyLoss(reduction='none')
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
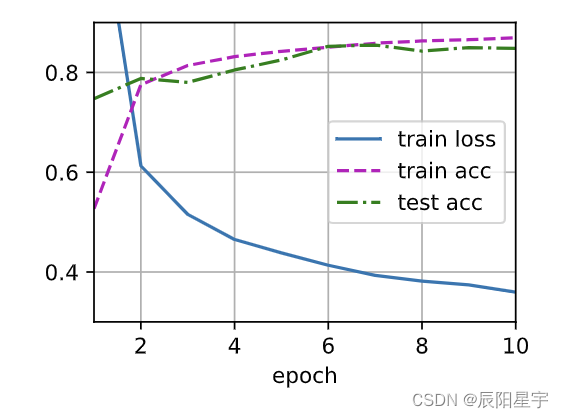
3. 简洁实现
net = nn.Sequential(nn.Flatten(),nn.Linear(784, 256),nn.ReLU(),# 在第一个全连接层之后添加一个dropout层nn.Dropout(dropout1),nn.Linear(256, 128),nn.ReLU(),# 在第二个全连接层之后添加一个dropout层nn.Dropout(dropout2),nn.Linear(128, 10))def init_weights(m):if type(m) == nn.Linear:nn.init.normal_(m.weight, std=0.01)net.apply(init_weights);
测试和训练
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
参考文章:暂退法(Dropout)