伺服控制大家有时可能会采用脉冲控制方式,位置给定通过脉冲串形式,脉冲控制的编程有时并不方便。对应简单机器控制,没有插补复杂的控制算法时。我们也可以使用低速率总线MODBUS进行控制,这种方式,简单高效成本低。此时系统的位置环在伺服内部完成(仍然属于半闭环控制),伺服系统的目标位置,我们可以通过MODBUS-RTU通信由PLC发送给对应的伺服系统。
1、MODBUS地址换算
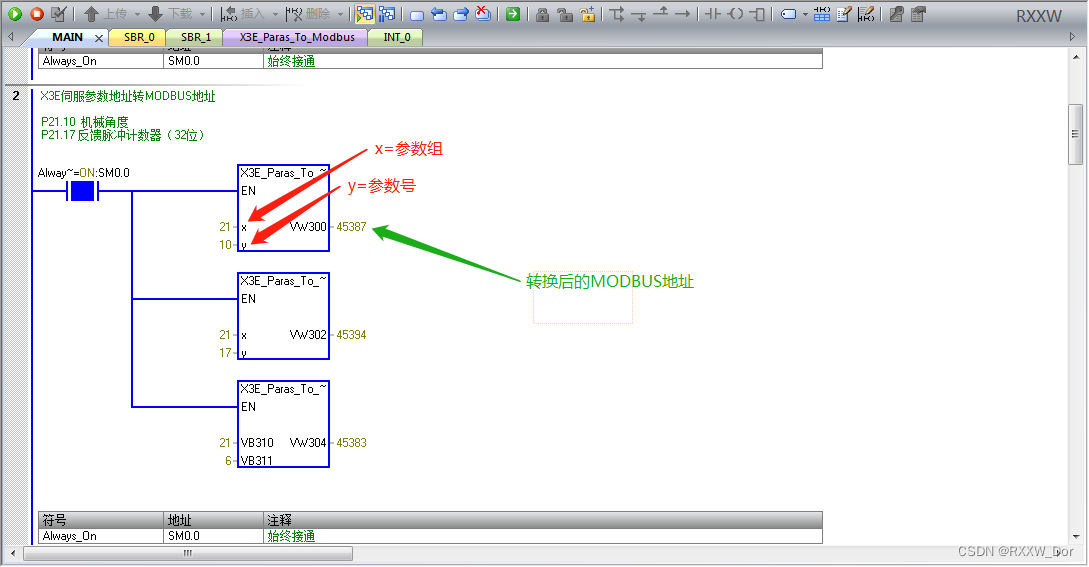
有了对应的MODBUS地址后,我们可以通过触摸屏或者上位机通过RS485MODBUS通信修改或者查看相应伺服的参数。
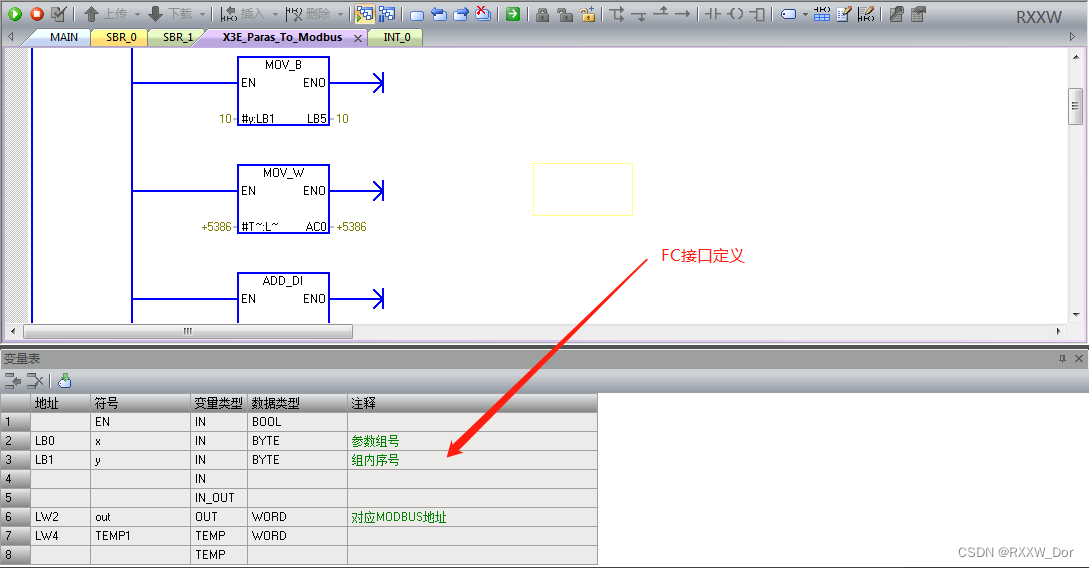
2、FC接口定义
3、FC完整代码
SUBROUTINE_BLOCK X3E_Paras_To_Modbus:SBR3
TITLE=X3E伺服参数转换为MODBUD地址
VAR_INPUT
x:BYTE; // 参数组号
y:BYTE; // 组内序号
END_VAR
VAR_OUTPUT
out:WORD; // 对应MODBUS地址
END_VAR
VAR
TEMP1:WORD;
END_VAR
BEGIN
Network 1
// 程序段注释
LD SM0.0
MOVB LB0, LB4
MOVB LB1, LB5
MOVW LW4, AC0
MOVD AC0, AC1
+D +40001, AC1
MOVW AC1, LW2
END_S