文章目录
- 前言
- 基本知识
- 实际使用
- 单相离网逆变器
- 单相并网逆变器
- PR控制器离散化
- 基本知识
- DSP实现
- 总结
前言
最近想学习一下并网逆变器,需要用到PR控制,全网找遍了许多学习资料,终于掌握的差不多了,在此做个记录,以及个人对PR(Proportional Resonant)控制的理解。
基本知识
PR控制的传递函数形式为
H ( s ) = K p + 2 K r s s 2 + ω o 2 H(s)=Kp+\frac{2Krs}{s^2+\omega_o^2} H(s)=Kp+s2+ωo22Krs。
利用matlab绘制一下该传递函数的幅频响应,是在谐振频率 ω = ω o \omega=\omega_o ω=ωo的频率点增益无穷大,且没有相位滞后。
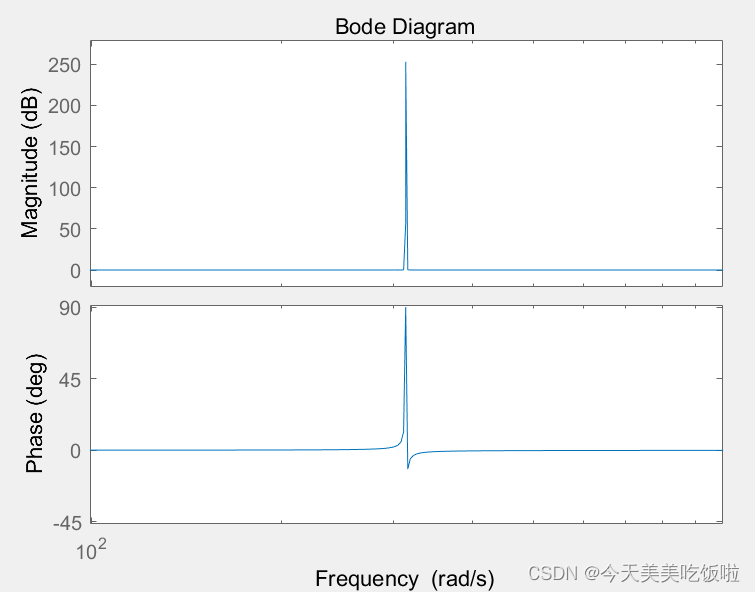
根据PR控制器上述的特性,我们可以设计谐振频率等于电网的角频率,使电网基波信息增益无穷大而其他频段增益下,从而应用在交流电路的控制中。
至于为什么不用传统的PID控制,其原因是PID控制器对于交流信号的控制性能差,对直流信号的跟踪性能好。因此DCDC变换中多采用PID控制,而在交流中也可以通过DQ坐标变换,将需要控制的交流信号变换为直流信号,再用直流控制器PID就可以实现很好的控制效果了。
总而言之,PID是直流信号控制器;PR是交流控制器。
实际使用
实际应用中,由于电网频率不会严格的等于50Hz,难免存在波动,因此前文提到的PR控制器在电网频率稍微偏离50Hz,性能大幅变差。为增加控制的鲁棒性,增加截止频率 ω c \omega_c ωc,改写传递函数为
H ( s ) = K p + 2 K r ω c s s 2 + 2 K r w c s + ω o 2 H(s)=Kp+\frac{2Kr\omega_cs}{s^2+2Krw_cs+\omega_o^2} H(s)=Kp+s2+2Krwcs+ωo22Krωcs
修改后的PR控制器,亦称为准比例谐振控制Quasis Proportional Resonant,在谐振频率附近的小范围内,仍然具有高增益,因此能适用电网频率波动的情况。
至此,我们发现应用准谐振控制时需要整定3个参数,Kp,Kr,wc。先回顾一下PID的三个参数。
- P因子,决定响应速度;
- I因子,决定稳态误差;
- D因子,决定抗扰能力。
而通常在电力电子中多用PI控制,电力传动有PI也有PD。PI控制电机无静差调速,可用于舵机消除抖动。
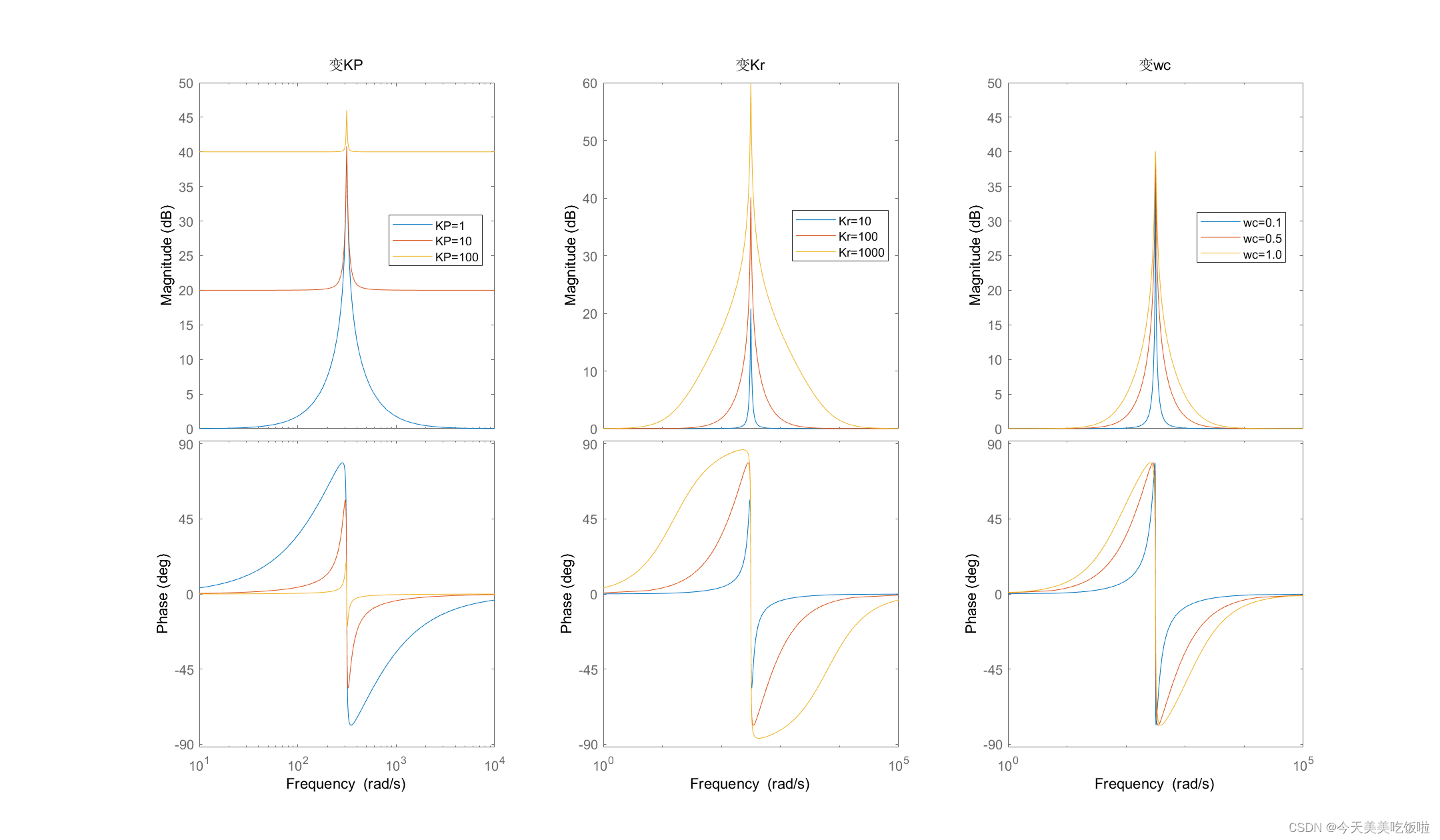
为了观察准比例谐振控制器中三个参数的影响,同样用MATLAB绘制bode图,控制变量法来看。
figure()
subplot(1,3,1)
Kp=1;Kr=100;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=10;Kr=100;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=100;Kr=100;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
legend('KP=1','KP=10','KP=100');title('变KP')
subplot(1,3,2)
Kp=1;Kr=10;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=1;Kr=100;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=1;Kr=1000;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
legend('Kr=10','Kr=100','Kr=1000');title('变Kr')
subplot(1,3,3)
Kp=1;Kr=100;wc=0.1*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=1;Kr=100;wc=0.5*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
Kp=1;Kr=100;wc=1*2*pi;wo=100*pi;PRs1=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);bode(PRs1);hold on;
legend('wc=0.1','wc=0.5','wc=1.0');title('变wc')
由bode图可知,Kp越大,其他低频段和高频段的增益越大;Kr越大,谐振点的增益越大,但附近周围频带的增益也相应有所增大;wc越大,周围频带的增益也相应有所增大。
而参数wc可以任意取 2 π × 0.1 2\pi\times 0.1 2π×0.1、 2 π × 0.5 2\pi\times 0.5 2π×0.5、 2 π × 1 2\pi\times 1 2π×1,真正需要整定的参数也就只有Kp和Kr了。
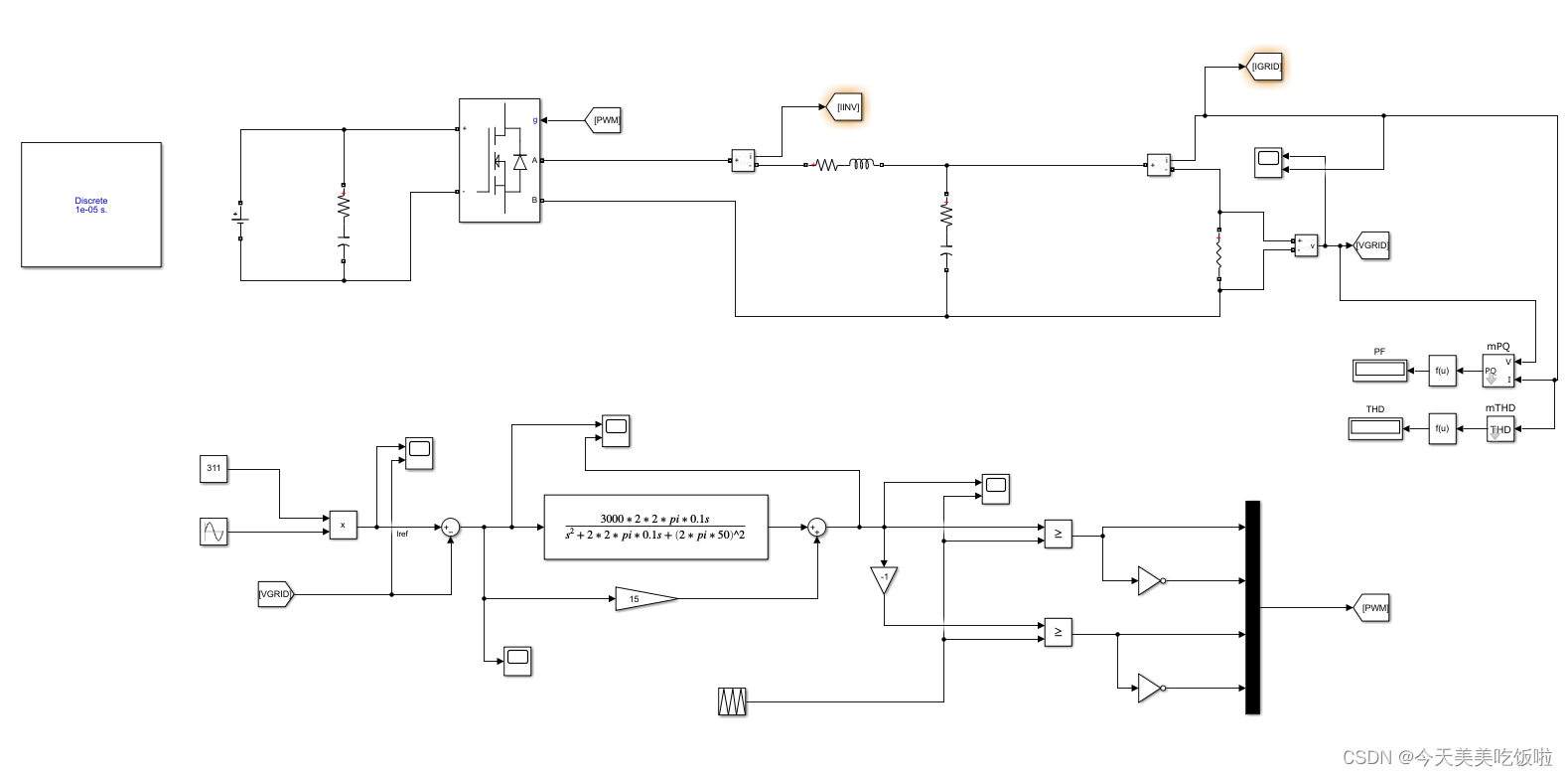
单相离网逆变器
离网逆变器是把DC逆变出来的AC电直接使用,输出接负载,控制对象是输出电压,力争低THD,幅值可控。
控制结构框图
资源链接
基于PR控制的单相离网逆变器
单相并网逆变器
并网逆变器是把DC逆变出来的AC电送入另一个交流系统,输出端接电网,控制对象是输出电流,力争低THD,幅值可控,且与电网电压同相位。
控制结构框图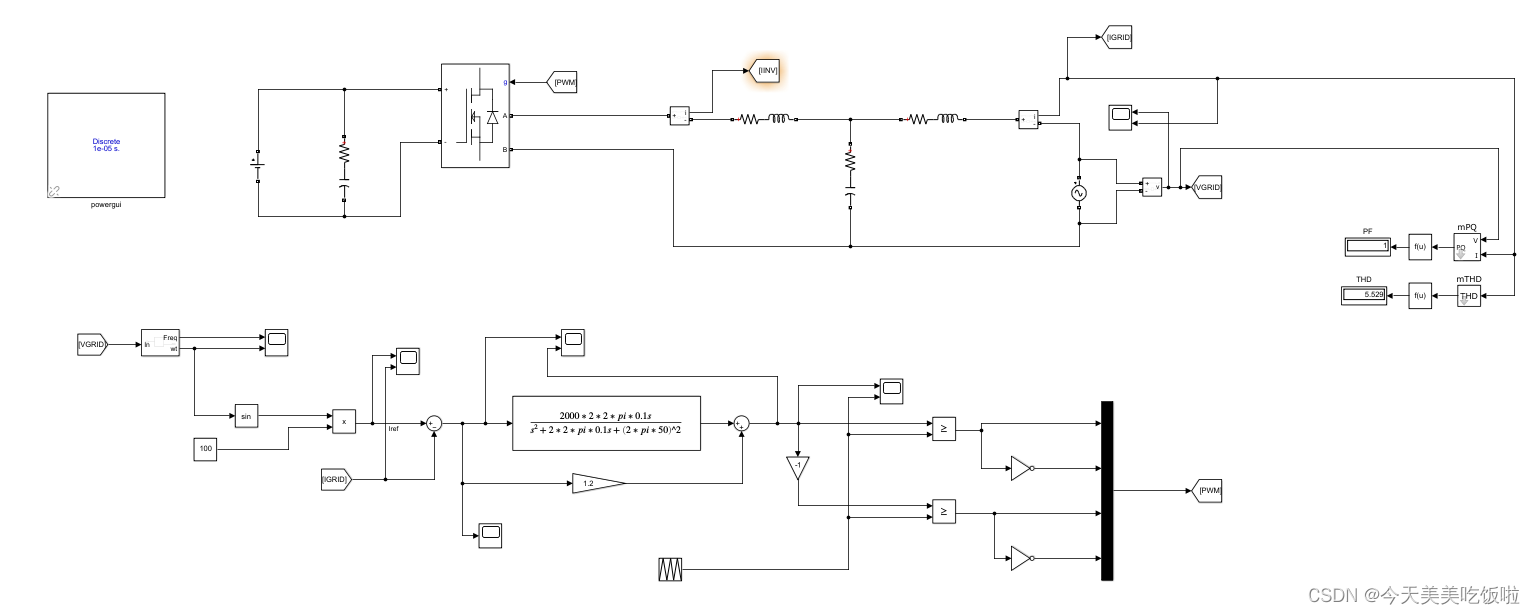
资源链接
基于PR控制的单相并网逆变器控制
PR控制器离散化
基本知识
目前而言,同一种控制方式有3种表达形式
- 时域,有连续时域和离散时域之分
- 复频域,又称s域
- z域
在大学之前的学习一直都是时域下的,也是最简单最容易理解的。大学期间接触的拉氏变换是由连续时域到复频域的变换,z变换是离散时域到z域的变换。
在连续时域下,描述不同时间点的方程称为微分方程。
在离散时域下,描述不同时间点的方程称为差分方程。
本人目前尚未学习到s域和z域之间的转换,好在有众多前人的研究基础。
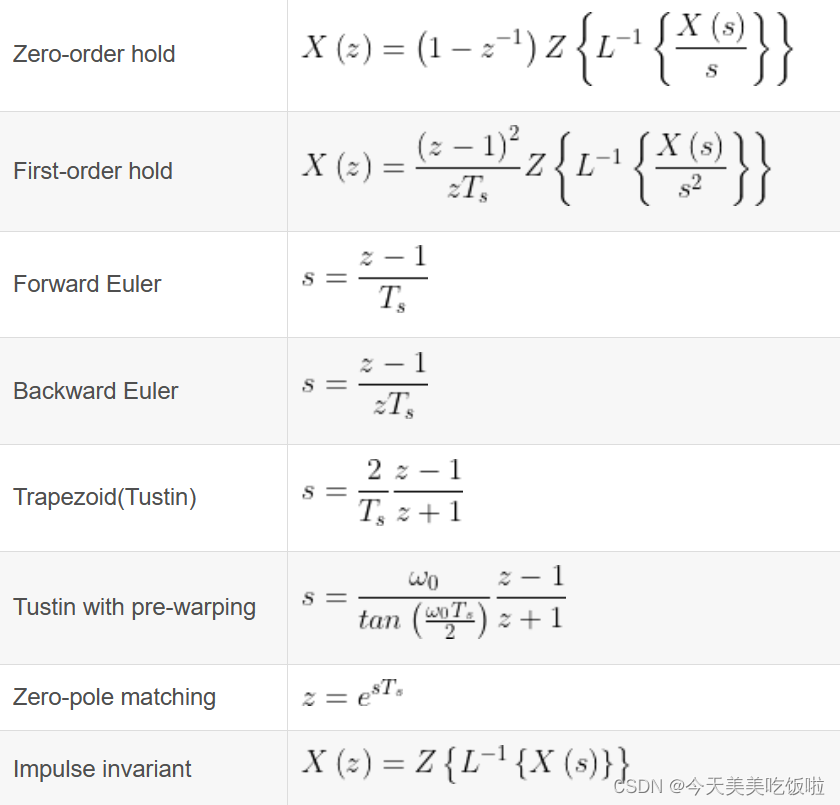
方法很多,选哪一个种呢?在TI写的数字锁相环算法库中有说明文档详细推导各个参数的计算,其中就涉及到连续传递函数离散化的问题,TI采用的Tustin。简单期间我们也选Tustin方法了。
MATLAB也提供了传递函数离散化的内置函数c2d。
Ts=1/25000;
Kp=1;
Kr=100;
wc=0.5*2*pi;
wo=100*pi;
c=Kp+tf([2*Kr*wc,0],[1 2*wc wo*wo]);
d=c2d(c,Ts,'tustin');
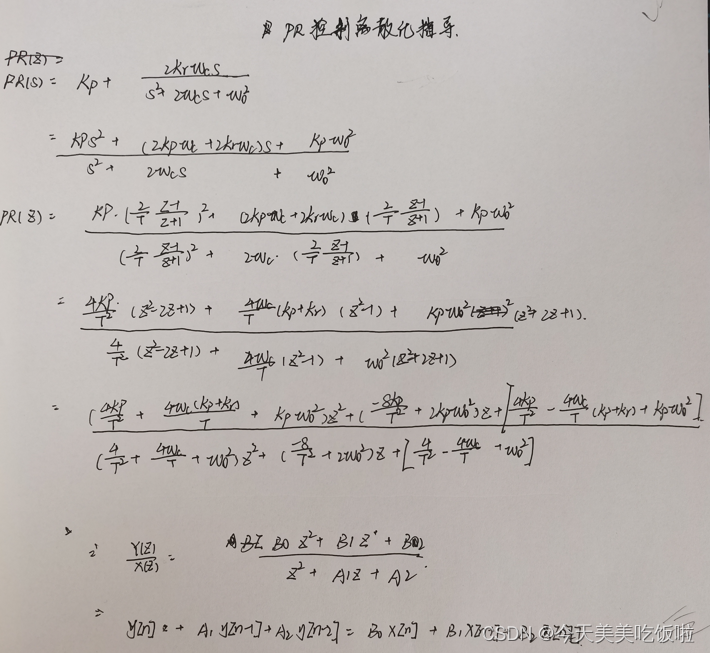
但是好像不能用MALTAB计算出准谐振的离散化结果,索性直接带入化简得了。
过程略,结果如下。
在当初学习的时候一直在思考离散化里面的T到底是什么。我的理解就是,相邻两次以离散化的方式实现连续传递函数的时间间隔,即T。在DSP中的控制一般写在中断中,那么对应的T即中断时间间隔。而在Simulink仿真中,Powergui和模型设置这两个地方都能设置步长,到底哪个才是真正的呢?目前没有想明白,若想要验证的话设置为相同的步长即可。
当时学习的时候也有一个疑问,为什么在学习PID控制器的时候没有所谓的离散化步骤。怎么就直接把PID的C语言实现给写出来了呢?是因为PID的连续时域表达式简单,很容易就能推导出离散时域表达式,用的是微积分的思想。而在学习PR控制器的时候,是先有他的传递函数,即s域表达式,可以直接从s域到z域变换。
那实现数字一阶滤波器的时候呢?也是先根据模拟RC电路推导传递函数,再变到连续时域,离散时域。那稍微复杂一点的二阶甚至高阶滤波器呢,就是直接从s域到z域到离散时域的。
总之,当我们用数字方式实现控制时,根本目的是得到他的离散时域表达式。
DSP实现
有了Z域下的表达式,可以直接得到离散时域表达式,即差分方程。
以二阶为例, Y ( z ) X ( z ) = A 0 + A 1 z − 1 + A 2 z − 2 B 0 + B 1 z − 1 + B 2 z − 2 \frac{Y(z)}{X(z)}=\frac{A_0+A_1z^{-1}+A_2z^{-2}}{B_0+B_1z^{-1}+B_2z^{-2}} X(z)Y(z)=B0+B1z−1+B2z−2A0+A1z−1+A2z−2。
则离散时域表达式为 B 0 y [ n ] + B 1 y [ n − 1 ] + B 2 y [ n − 2 ] = A 0 x [ n ] + A 1 x [ n − 1 ] + A 2 x [ n − 2 ] B_0y[n]+B_1y[n-1]+B_2y[n-2]=A_0x[n]+A_1x[n-1]+A_2x[n-2] B0y[n]+B1y[n−1]+B2y[n−2]=A0x[n]+A1x[n−1]+A2x[n−2]。
因此可以根据前面推导的PR控制器的在Z域下的通用表达式,写出它的通用离散时域表达式。
/** myPR.c** Created on: 2023年4月25日* Author: EnglishName*/#include <myAPP/myPR/myPR.h>PR pr_v_ac = { 0 };
PR pr_i_ac = { 0 };void PR_init(PR *p,float32 Kp,float32 Kr,float32 Ts,float32 wc, float32 wo)
{float temp = 0;p->Ts=Ts;p->Kp=Kp;p->Kr=Kr;p->wc=wc;p->wo=wo;temp = 4 / p->Ts / p->Ts + 4 * p->wc / p->Ts + p->wo * p->wo;p->B0 = (4 * p->Kp / p->Ts / p->Ts + 4 * p->wc * (p->Kp + p->Kr) / p->Ts+ p->Kp * p->wo * p->wo) / temp;p->B1 = (-8 * p->Kp / p->Ts / p->Ts + 2 * p->Kp * p->wo * p->wo) / temp;p->B2 = (4 * p->Kp / p->Ts / p->Ts - 4 * p->wc / p->Ts * (p->Kp + p->Kr)+ p->Kp * p->wo * p->wo) / temp;p->A1 = (-8 / p->Ts / p->Ts + 2 * p->wo * p->wo) / temp;p->A2 = (4 / p->Ts / p->Ts - 4 * p->wc / p->Ts + p->wo * p->wo) / temp;/*PRpr;* 差分方程* y[n]+A1[n-1]+A2[n-2]=B0x[n]+B1x[n-1]+B2[n-2]*/
}void PR_calc(PR *p)
{p->vo = -p->A1 * p->vo_1 - p->A2 * p->vo_2 + p->B0 * p->vi + p->B1 * p->vi_1+ p->B2 * p->vi_2;// update and storep->vo_2=p->vo_1;p->vo_1 = p->vo;p->vi_2 = p->vi_1;p->vi_1 = p->vi;
}/** myPR.h** Created on: 2023年4月25日* Author: EnglishName*/#ifndef MYAPP_MYPR_MYPR_H_
#define MYAPP_MYPR_MYPR_H_#include "F28x_Project.h"typedef struct
{float Kp;float Kr;float wo;float wc;float Ts;float A0, A1, A2, B0, B1, B2;float vo, vo_1, vo_2;float vi, vi_1, vi_2;
} PR;extern PR pr_v_ac;
extern PR pr_i_ac;void PR_init(PR *p, float32 Kp, float32 Kr, float32 Ts, float32 wc, float32 wo);
void PR_calc(PR *p);#endif /* MYAPP_MYPR_MYPR_H_ */总结
在去年7月准备电赛的时候偶然看到有几篇讲解数字滤波器,第一次接触传递函数离散化,深刻被数字时代的数字方式折服,改改代码,就可以实现不同的截至频率,甚至不同阶数,而模拟方式还要改元器件。当时就感觉这玩意太他妈牛逼了,很想学懂它,奈何学不会呀。后面全身心做电赛,就忘了这事儿。
直至最近学习PR控制,当初的感觉又回来了,一股劲儿吃下来了。顺带也给自己把一阶、二阶数字滤波器的库给写好了。