最佳点云分割分析
Learning to Optimally
Segment Point Clouds
论文链接:https://arxiv.org/abs/1912.04976
摘要
我们关注LiDAR点云的无类实例分割问题。我们提出了一种将图论搜索与数据驱动的学习相结合的方法:在一组候选分割中搜索综合目标性(objectness)评分较高的候选分割。我们证明了,如果根据分割中最低的目标性对分割进行评分,那么就有一种有效的算法可以在成倍数量的候选分割中找到最优的最坏情况分割。此外,我们还针对平均情况提出了一种有效的算法。为了进行评估,我们将KITTI 3D检测重新用作分割基准,并通过经验证明了我们的算法在分割点云上的性能明显优于过去的自下而上的分割方法和自上而下的基于对象的算法。
主要贡献
• 利用几何约束减少候选分割的数量,并构建树结构
• 利用树结构进行最优分割搜索,提出可应用动态规划的高效搜索算法

 )
)
主要方法
- 构建满足几何约束的分割搜索树。有些分割方案,如{ {1,2,5}, {3,4,6}} 不满足(如果次近邻同属一个分割个体那么最近邻也应属于同一个个体)几何约束而被舍弃。剩余的候选分割可以构建一个如下图的树结构
。数字1-6分别代表点云中的6个点,右图中一个顶点(vertext) 代表相应的分割个体(segment), 通过顶点切割可以获得候选分割方案,如切割节点 {1,2,3,4,5,6} 的两个链接即可获得代表 {{1,2,3}, {4,5,6}} 的候选分割方案。

- 假设,已知树结构中任意一个顶点,即任意分割个体(segment)的目标性(objectness),遍历全部候选切割找到最优分割仍然随点云中点的数量而指数性增长。文章证明以候选分割中个体的最低目标性评分作为目标函数,可以大大提升搜索效率,同时保证获得最优的最坏情况分割。基于这一结论,文章提出如下图所示算法一,其中C为当前顶点,Tc为以C为根节点的树。

该算法从树根开始进行深度优先搜索:
• 如果当前节点的任一子节点的目标性评分更低,则对当前分枝剪枝,返回当前节点的分割个体和相应的目标性评分。
• 如果全部子节点的目标性评分都比当前节点更高,则继续对子节点进行深度优先搜索。
-
将算法一中的目标函数由最低目标性评分更换为平均目标性评分虽然无法保证获得最优的平均情况分割,但是实验数据表明使用平均目标性评分结果更好。
-
分割个体的目标性是可学习的,本文以改进的 IoU 作为目标性标签训练 PointNet++ 回归网络,损失函数为预测和标签的均方误差。
主要结果
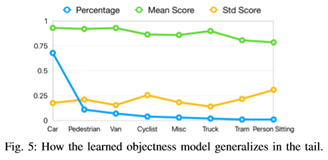
文章使用KITTI作为实验数据集,点云分割和点云实例分割的结果如下图 TABLE I 和 TABLE II 所示:本文提出的方法与 SECOND++ 相比在 car 等常见分类中表现更差,但是在 misc 等少见分类中表现更佳。


下图展示了文章提出的方法在四个不同情景下的输出样例。