基于策略的离线算法TD3
1.1 简介
reference: openai-TD3
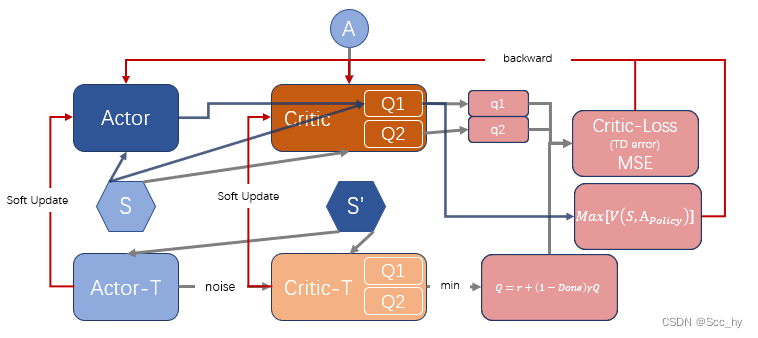
DDPG的critic会高估, 从而导致actor策略失败。TD3是增加了三个关键技巧优化DDPG。经过优化后的TD3(Twin Dalayed DDPG 双延迟深度确定性策略梯度算法)适合于具有高维连续动作空间的任务。
Tricks:
- Clipped Double Q-learning: critic中有两个
Q-net, 每次产出2个Q值,使用其中小的- 即 Q t r a g e t = m i n ( Q 1 , Q 2 ) Q_{traget}=min(Q1, Q2) Qtraget=min(Q1,Q2); Q t r a g e t = r e w a r d + ( 1.0 − d o n e ) ∗ γ ∗ Q t r a g e t Q_{traget} = reward + (1.0 - done) * \gamma * Q_{traget} Qtraget=reward+(1.0−done)∗γ∗Qtraget
- 需要注意这时候 c r i t i c L o s s = M S E ( Q 1 c u r , Q t r a g e t ) + M S E ( Q 2 c u r , Q t r a g e t ) criticLoss = MSE(Q1_{cur}, Q_{traget}) + MSE(Q2_{cur}, Q_{traget}) criticLoss=MSE(Q1cur,Qtraget)+MSE(Q2cur,Qtraget) 对 $ Q1_{cur}, Q2_{cur} $ 求偏导
- Delayed Policy Update: actor的更新频率要小于critic(当前的actor参数可以产出更多样本)。
- 论文中建议
one policy for every two Q-funtion updates.
- 论文中建议
- Target Policy Smoothing: 在 target-actor输出的action中增加noise (本质上是正则化)
- 从而可以更充分的理解游戏空间,使得网络更健壮。
- a ′ ( s ′ ) = c l i p ( U θ t ( s ′ ) + c l i p ( ϵ , − c , c ) , a L , a H ) a'(s') = clip(U_{\theta_{t}}(s') + clip(\epsilon, -c, c), a_{L}, a_{H}) a′(s′)=clip(Uθt(s′)+clip(ϵ,−c,c),aL,aH)
1.2 Pytorch实践
Actor
策略网络(Actor)直接输出确定性action, 这里我们的激活函数都是用的nn.Tanh()
class DT3PolicyNet(nn.Module):"""输入state, 输出action"""def __init__(self, state_dim: int, hidden_layers_dim: typ.List, action_dim: int, action_bound: float=1.0):super(DT3PolicyNet, self).__init__()self.action_bound = action_boundself.features = nn.ModuleList()for idx, h in enumerate(hidden_layers_dim):self.features.append(nn.ModuleDict({'linear': nn.Linear(hidden_layers_dim[idx-1] if idx else state_dim, h),'linear_action': nn.Tanh()}))self.fc_out = nn.Linear(hidden_layers_dim[-1], action_dim)def forward(self, x):for layer in self.features:x = layer['linear_action'](layer['linear'](x))return torch.tanh(self.fc_out(x)) * self.action_bound
DQN输入state返回所有action的价值,再用max选取action
TD3的valueNet基本和DDPG一样,就多了一个QNet, 均是直接以state和action为入参,输出价值
Criticor
class TD3ValueNet(nn.Module):"""输入[state, cation], 输出value"""def __init__(self, state_action_dim: int, hidden_layers_dim: typ.List):super(TD3ValueNet, self).__init__()self.features_q1 = nn.ModuleList()self.features_q2 = nn.ModuleList()for idx, h in enumerate(hidden_layers_dim):self.features_q1.append(nn.ModuleDict({'linear': nn.Linear(hidden_layers_dim[idx-1] if idx else state_action_dim, h),'linear_activation': nn.ReLU(inplace=True)}))self.features_q2.append(nn.ModuleDict({'linear': nn.Linear(hidden_layers_dim[idx-1] if idx else state_action_dim, h),'linear_activation': nn.ReLU(inplace=True)}))self.head_q1 = nn.Linear(hidden_layers_dim[-1] , 1)self.head_q2 = nn.Linear(hidden_layers_dim[-1] , 1)def forward(self, state, action):x = torch.cat([state, action], dim=1).float() # 拼接状态和动作x1 = xx2 = xfor layer1, layer2 in zip(self.features_q1, self.features_q2):x1 = layer1['linear_activation'](layer1['linear'](x1))x2 = layer2['linear_activation'](layer2['linear'](x2))return self.head_q1(x1), self.head_q2(x2)def Q1(self, state, action):x = torch.cat([state, action], dim=1).float() # 拼接状态和动作for layer in self.features_q1:x = layer['linear_activation'](layer['linear'](x))return self.head_q1(x) Agent
这里我们要注意探索输出的noise和Tick3(Target Policy Smoothing)中的noise
- 探索输出的noise:
- 作用: 增大探索的空间
action_noise = np.random.normal(loc=0, scale=self.max_action * self.train_noise, size=self.action_dim)- 输出:
act.detach().numpy()[0] + action_noise).clip(self.action_low, self.action_high
- Target Policy Smoothing
policy_noise:policy_noise = TD3_kwargs.get('policy_noise', 0.2) * self.max_actionnoise_clip: 限制最大noisepolicy_noise_clip = TD3_kwargs.get('policy_noise_clip', 0.5) * self.max_action
@torch.no_grad()def smooth_action(self, state):act_target = self.target_actor(state)noise = (torch.randn(act_target.shape).float() *self.policy_noise).clip(-self.noise_clip, self.noise_clip)smoothed_target_a = (act_target + noise).clip(-self.max_action, self.max_action)return smoothed_target_a
TD3智能体脚本
from ._base_net import TD3ValueNet as valueNet
from ._base_net import DT3PolicyNet as policyNetclass TD3:def __init__(self,state_dim: int, actor_hidden_layers_dim: typ.List, critic_hidden_layers_dim: typ.List, action_dim: int,actor_lr: float,critic_lr: float,gamma: float,TD3_kwargs: typ.Dict,device: torch.device=None):"""state_dim (int): 环境的sate维度 actor_hidden_layers_dim (typ.List): actor hidden layer 维度 critic_hidden_layers_dim (typ.List): critic hidden layer 维度 action_dim (int): action的维度 actor_lr (float): actor学习率 critic_lr (float): critic学习率 gamma (float): 折扣率 TD3_kwargs (typ.Dict): TD3算法的三个trick的输入 example: TD3_kwargs={ 'action_low': env.action_space.low[0], 'action_high': env.action_space.high[0], - soft update parameters 'tau': 0.005, - trick2: Target Policy Smoothing 'delay_freq': 1, - trick3: Target Policy Smoothing 'policy_noise': 0.2, 'policy_noise_clip': 0.5, - exploration noise 'expl_noise': 0.25, - 探索的 noise 指数系数率减少 noise = expl_noise * expl_noise_exp_reduce_factor^t 'expl_noise_exp_reduce_factor': 0.999 } device (torch.device): 运行的device """if device is None:device = torch.device('cpu')self.device = deviceself.action_low = TD3_kwargs.get('action_low', -1.0)self.action_high = TD3_kwargs.get('action_high', 1.0)self.max_action = max(abs(self.action_low), abs(self.action_high))self.actor = policyNet(state_dim, actor_hidden_layers_dim, action_dim, action_bound = self.max_action)self.critic = valueNet(state_dim + action_dim, critic_hidden_layers_dim)self.target_actor = copy.deepcopy(self.actor)self.target_critic = copy.deepcopy(self.critic)self.actor.to(device)self.critic.to(device)self.target_actor.to(device)self.target_critic.to(device)self.actor_opt = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)self.critic_opt = torch.optim.Adam(self.critic.parameters(), lr=critic_lr)self.gamma = gammaself.action_dim = action_dimself.tau = TD3_kwargs.get('tau', 0.01)self.policy_noise = TD3_kwargs.get('policy_noise', 0.2) * self.max_action self.policy_noise_clip = TD3_kwargs.get('policy_noise_clip', 0.5) * self.max_action self.expl_noise = TD3_kwargs.get('expl_noise', 0.25)self.expl_noise_exp_reduce_factor = TD3_kwargs.get('expl_noise_exp_reduce_factor', 1)self.delay_counter = -1# actor延迟更新的频率: 论文建议critic更新2次, actor更新1次, 即延迟1次self.delay_freq = TD3_kwargs.get('delay_freq', 1)# Normal sigmaself.train = Falseself.train_noise = self.expl_noise@torch.no_grad()def smooth_action(self, state):"""trick3: Target Policy Smoothing在target-actor输出的action中增加noise"""act_target = self.target_actor(state)noise = (torch.randn(act_target.shape).float() *self.policy_noise).clip(-self.policy_noise_clip, self.policy_noise_clip)smoothed_target_a = (act_target + noise).clip(self.action_low, self.action_high)return smoothed_target_a@torch.no_grad()def policy(self, state):state = torch.FloatTensor([state]).to(self.device)act = self.actor(state)if self.train:action_noise = np.random.normal(loc=0, scale=self.max_action * self.train_noise, size=self.action_dim)self.train_noise *= self.expl_noise_exp_reduce_factorreturn (act.detach().numpy()[0] + action_noise).clip(self.action_low, self.action_high)return act.detach().numpy()[0]def soft_update(self, net, target_net):for param_target, param in zip(target_net.parameters(), net.parameters()):param_target.data.copy_(param_target.data * (1 - self.tau) + param.data * self.tau)def update(self, samples):self.delay_counter += 1state, action, reward, next_state, done = zip(*samples)state = torch.FloatTensor(state).to(self.device)action = torch.tensor(action).to(self.device)reward = torch.tensor(reward).view(-1, 1).to(self.device)next_state = torch.FloatTensor(next_state).to(self.device)done = torch.FloatTensor(done).view(-1, 1).to(self.device)# 计算目标Qsmooth_act = self.smooth_action(state)# trick1: **Clipped Double Q-learning**: critic中有两个`Q-net`, 每次产出2个Q值,使用其中小的target_Q1, target_Q2 = self.target_critic(next_state, smooth_act)target_Q = torch.minimum(target_Q1, target_Q2)target_Q = reward + (1.0 - done) * self.gamma * target_Q# 计算当前Q值current_Q1, current_Q2 = self.critic(state, action)q_loss = F.mse_loss(current_Q1.float(), target_Q.float().detach()) + F.mse_loss(current_Q2.float(), target_Q.float().detach())self.critic_opt.zero_grad()q_loss.backward()self.critic_opt.step()# trick2: **Delayed Policy Update**: actor的更新频率要小于critic(当前的actor参数可以产出更多样本)。if self.delay_counter == self.delay_freq:# actor 延迟updateac_action = self.actor(state)actor_loss = -torch.mean(self.critic.Q1(state, ac_action))self.actor_opt.zero_grad()actor_loss.backward()self.actor_opt.step()self.soft_update(self.actor, self.target_actor)self.soft_update(self.critic, self.target_critic)self.delay_counter = -1def save(self, file_path):act_f = os.path.join(file_path, 'TD3_actor.ckpt')critic_f = os.path.join(file_path, 'TD3_actor.ckpt')torch.save(self.actor.state_dict(), act_f)torch.save(self.q_critic.state_dict(), critic_f)def load(self, file_path):act_f = os.path.join(file_path, 'TD3_actor.ckpt')critic_f = os.path.join(file_path, 'TD3_actor.ckpt')self.actor.set_state_dict(torch.load(act_f))self.q_critic.set_state_dict(torch.load(critic_f))1.2.2 智能体训练
整体训练脚本可以看笔者的github test_TD3
注意设置tau要设置小一些
def BipedalWalkerHardcore_TD3_test():"""policyNet: valueNet: """env_name = 'BipedalWalkerHardcore-v3'gym_env_desc(env_name)env = gym.make(env_name)print("gym.__version__ = ", gym.__version__ )path_ = os.path.dirname(__file__)cfg = Config(env, # 环境参数save_path=os.path.join(path_, "test_models" ,'TD3_BipedalWalkerHardcore-v3_test_actor-3.ckpt'), seed=42,# 网络参数actor_hidden_layers_dim=[200, 200],critic_hidden_layers_dim=[200, 200],# agent参数actor_lr=1e-4,critic_lr=3e-4,gamma=0.99,# 训练参数num_episode=5000,sample_size=256,# 环境复杂多变,需要保存多一些bufferoff_buffer_size=int(1e6),off_minimal_size=2048,max_episode_rewards=1000,max_episode_steps=1000,# agent 其他参数TD3_kwargs={'action_low': env.action_space.low[0],'action_high': env.action_space.high[0],# soft update parameters'tau': 0.005, # trick2: Delayed Policy Update'delay_freq': 1,# trick3: Target Policy Smoothing'policy_noise': 0.2,'policy_noise_clip': 0.5,# exploration noise'expl_noise': 0.25,# 探索的 noise 指数系数率减少 noise = expl_noise * expl_noise_exp_reduce_factor^t'expl_noise_exp_reduce_factor': 0.999})agent = TD3(state_dim=cfg.state_dim,actor_hidden_layers_dim=cfg.actor_hidden_layers_dim,critic_hidden_layers_dim=cfg.critic_hidden_layers_dim,action_dim=cfg.action_dim,actor_lr=cfg.actor_lr,critic_lr=cfg.critic_lr,gamma=cfg.gamma,TD3_kwargs=cfg.TD3_kwargs,device=cfg.device)agent.train = Truetrain_off_policy(env, agent, cfg, done_add=False, reward_func=reward_func)agent.actor.load_state_dict(torch.load(cfg.save_path))play(gym.make(env_name, render_mode='human'), agent, cfg, episode_count=2)if __name__ == '__main__':BipedalWalkerHardcore_TD3_test()
1.2.3 训练出的智能体观测
最后将训练的最好的网络拿出来进行观察
由于环境较为复杂,且笔者用CPU训练的所以在有的复杂随机图上表现还是有欠缺。
env_name = 'BipedalWalkerHardcore-v3'
agent.actor.load_state_dict(torch.load(cfg.save_path)
)
play(gym.make(env_name, render_mode='human'), agent, cfg, episode_count=2)