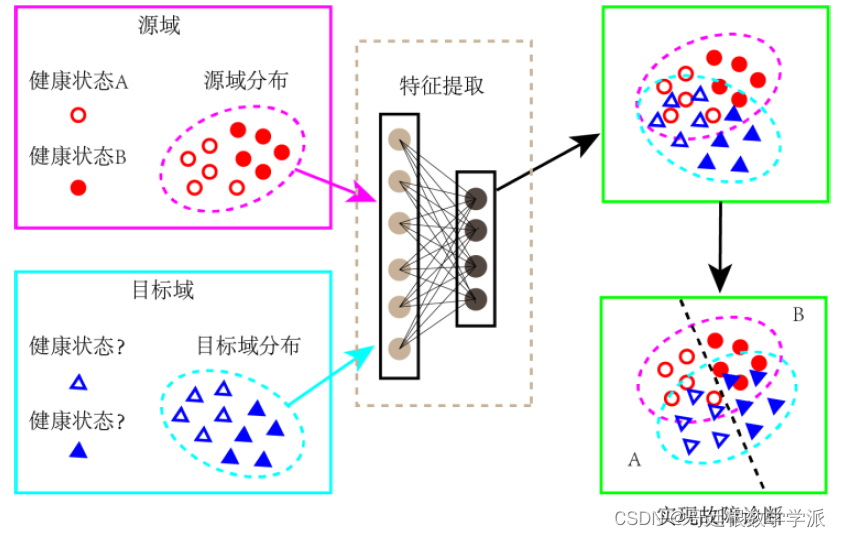
虽然已有的基于数据驱动的智能故障诊断方法讨论了测试数据和训练数据同分布场景下的故障诊断问题,然而同分布假设是一种比较理想的状态。实际上,无论是从动力学角度上对旋转机械进行分析,还是依据历史经验对设备故障数据进行振动特性分析,传感器的故障振动信号在特征空间的分布信息均难以预先判断,也难以获取服从同分布假设的训练数据集和待测试数据集。即便能够获取例如设备型号、运行工况、故障程度、振动传递路径等可能影响特征分布形态的关键信息,也需要大量相关的故障模拟试验才能获取足够的用于模型训练的同分布数据,这无疑降低了基于深度学习故障诊断方法的可行性。为了增强模型的普适性,基于迁移学习的跨域故障诊断方法得到了许多关注。
1)同一设备但不同工况的跨域诊断任务。对于同一设备而言,其工作负载通常由于加工任务的不同而发生变化,传感器采集到的故障信号通常源于不同的负载工况,导致虽然所采集的信号代表的故障模式相同,但可能处于不同的特征分布空间。因此,一种负载工况下训练的故障诊断方法仅适用于该工况所对应的分布空间,一旦负载发生变化,其诊断能力也会发生变化。为了使训练好的方法能够在实际工程中产生良好效果,提高已有方法对不同工况的泛化能 力具有重要意义。
2)不同设备不同工况的跨域诊断任务。由于机械设备长时间处于正常的运行状态,仅有少部分时间处于故障状态,导致传感器通常能采集到大量的正常状态的运行数据,故障数据由于样本稀少极难采集,这导致了不同故障模式的数据样本数量存在不均衡问题。基于深度学习方法的训练过程所用的来自于不同故障模式的样本数量是相同的,因此只能用具有最少数量故障样本的故障模式确定训练样本总数。有限的训练样本将限制深度网络性能的发挥,导致经过训练的故障诊断方法会产生欠拟合的问题,影响了故障诊断的识别精度。 因此,为了获取更多的训练样本,利用多个源自非同分布故障数据辅助数据集指导训练,不失为提高方法精度的可行方案。但是上述跨域诊断思路会造 成更多的源域和目标域间的差异,如设备型号、振动传递路径、环境噪声等。 如何消除影响并从不同设备来源的故障数据中提取有指导性的共性信息,实现有效的跨域故障诊断,成为研究的焦点。
知乎咨询:哥廷根数学学派
擅长现代信号处理(改进小波分析系列,改进变分模态分解,改进经验小波变换,改进辛几何模态分解等等),改进机器学习,改进深度学习,机械故障诊断,改进时间序列分析(金融信号,心电信号,振动信号等)
算法代码地址,浏览器打开:mbd.pub/o/GeBENHAGEN