重力+外力=加速度
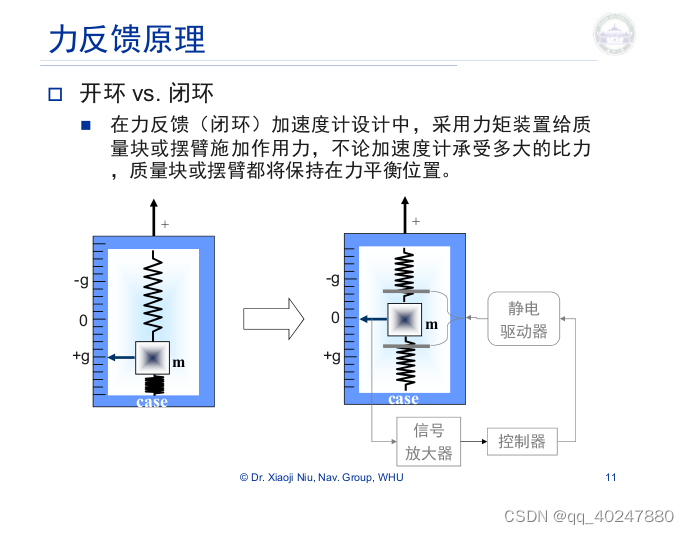
机械阻尼换为电阻尼,带宽提高取决于控制器响应速度
右方是不平衡跷跷板,测量顶面电容
机械中测量角速度的旋转编码器,测速电机测量的两个看得见实际物体的转子定子相对角速度,但是陀螺是相对于惯性参考系,看不见。一个转子确定两个轴向旋转度。4个测量分配3个方向,通过交叉均分荣冗余各方向的测量
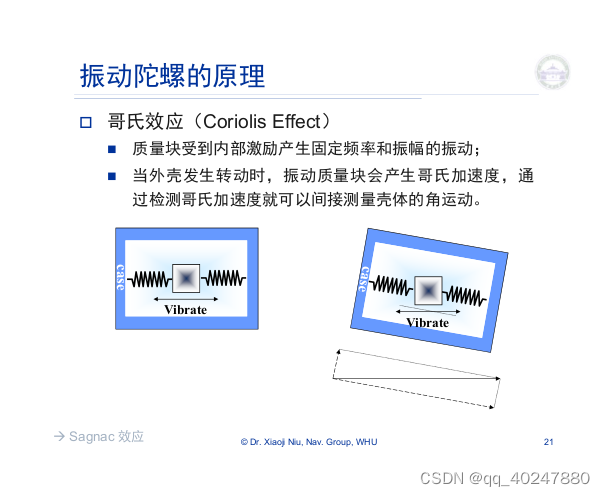
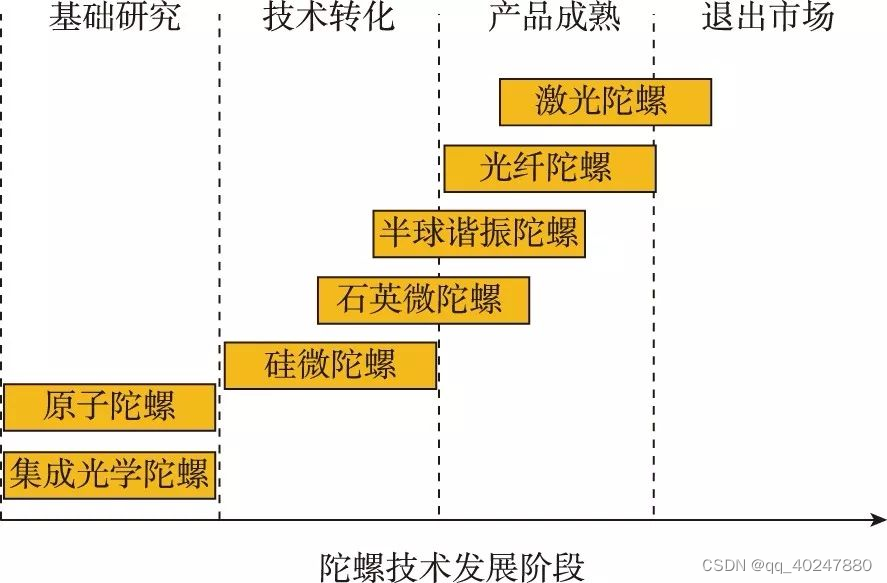
振动和旋转都会哥式效应。。机械陀螺还有动力调节陀螺,太脆弱淘汰了。
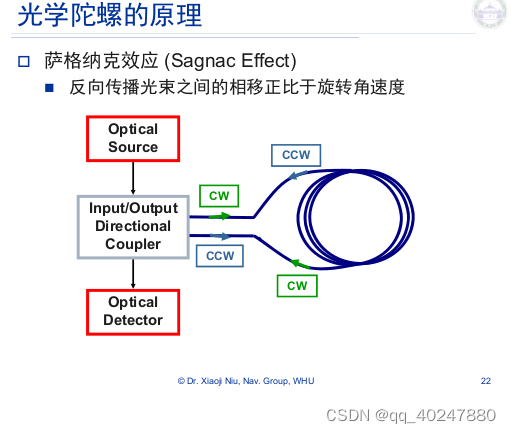
狭义相对性原理
一切物理定律(除引力外的力学定律、电磁学定律以及其他相互作用的动力学定律)在所有惯性系中均有效;或者说,一切物理定律(除引力外)的方程式在洛伦兹变换下保持形式不变。不同时间进行的实验给出了同样的物理定律,这正是相对性原理的实验基础。
光速不变原理
光在真空中总是以确定的速度c传播,速度的大小同光源的运动状态无关。在真空中的各个方向上,光信号传播速度(即单向光速)的大小均相同(即光速各向同性);光速同光源的运动状态和观察者所处的惯性系无关。这个原理同经典力学不相容。有了这个原理,才能够准确地定义不同地点的同时性。
所以,简单的来说,狭义相对论就是爱因斯坦假设光速在不同的参考系下都一样,然后把牛顿体系里除了万有引力定律的东西重新给推理了一遍。因为光速是不变的,所以在爱因斯坦推导出来的新公式里,啥都跟速度光速有关系,时间、长度、质量、能量都是,然后就有了上面说的运动的物体时间会变慢,长度会缩短,质量会增加这些狭义相对论的效应。惯性系就是静止或者匀速直线运动的参考系,简单来说就是没有加速度的条件。于是爱因斯坦就绞尽脑汁,把相对论从惯性系推广到非惯性系,要让这一套思想真正的在不管有没有加速度都能使用,爱因斯坦成功了,后面这个在非惯性系里也能用的就叫广义相对论。
总之,爱因斯坦经过一轮疯狂的思考之后,他大胆的提出了一个假设:引力场和加速度的等效的(做了通俗化处理)。说的正规一点就是:局部引力场中自由下落的参考系与无引力场的惯性系不可区分。回到电梯的话题就是:我悬浮在电梯里,你从里面完全无法区分我是悬浮在太空里(惯性系),还是在一个自由落体运动的电梯里(有地球引力的非惯性系),无法区分就是等价,就是说两者的在物理上是一样的。
爱因斯坦真的就这么干了,利用等效原理可以把带引力的非惯性系转化成不含引力的惯性系,凡是有引力的地方我都给它加一个自由降落的参考系将引力消除,然后剩下的事情用狭义相对论处理。利用这样的思想,爱因斯坦创立了广义相对论,把引力包也包含到里面去了。

这个方程左边表示的是时空弯曲的情况,右边表达物质及其运动。用一句比较诗意优雅的话来说就是:物质告诉时空怎么弯曲,时空告诉物质怎么运动。广义相对论的通俗解释就只能到这里了,它的核心思想的就是:任何有质量的物体都会引起时空弯曲,然后物体在这个弯曲的时空里继续做他们的“惯性运动”。
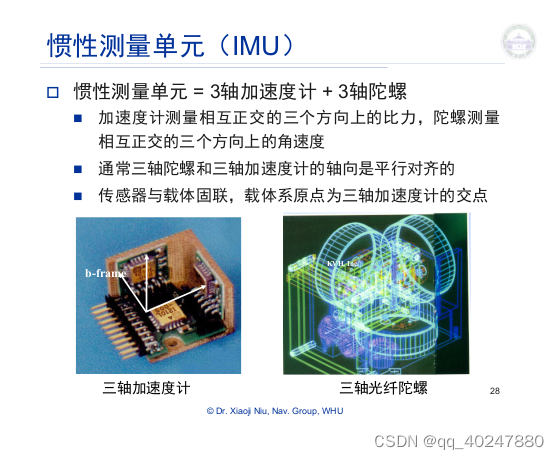
刚体任何一点的角速度都一样,但是线速度不一样。所以加速度计为中心
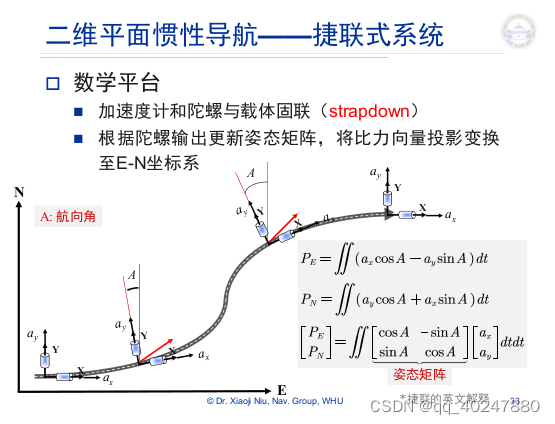
strap布条,绑在一起

平台式旋转框可以自标定,平台式对其的不是地球的东北,而是自定义惯性参考系的轴向
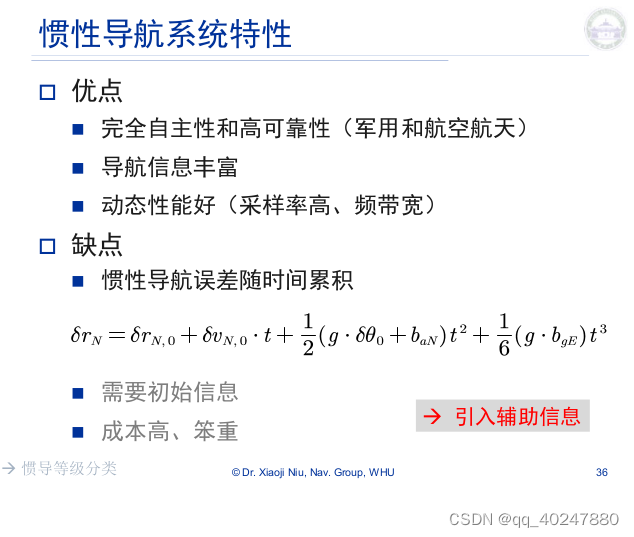
公式中为极端简化后,定性判断。初始位置误差1:1,初始速度误差1:t,1/2初始俯仰姿态误差(重力错误投影到加速度)+加速度偏置误差1:tt,1/6 角速度偏置误差(角速度-角度误差-重力加速度投影误差等)1:ttt
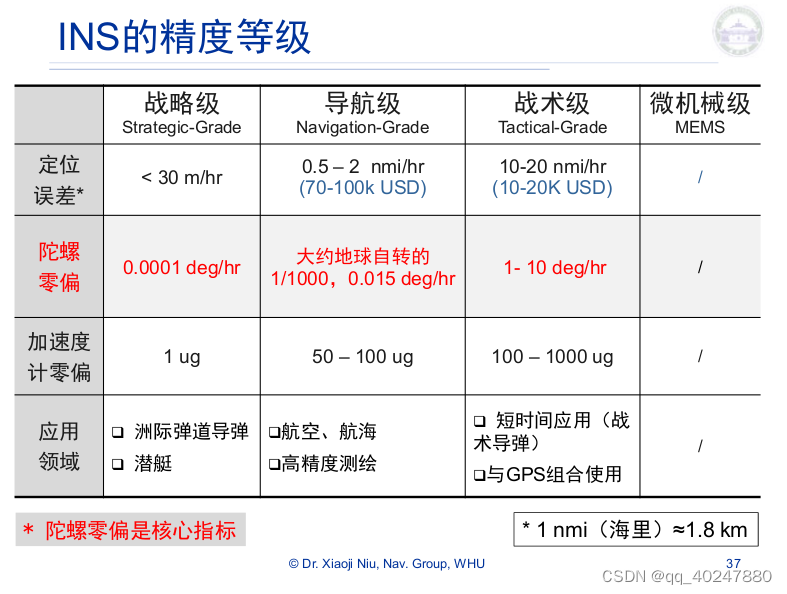
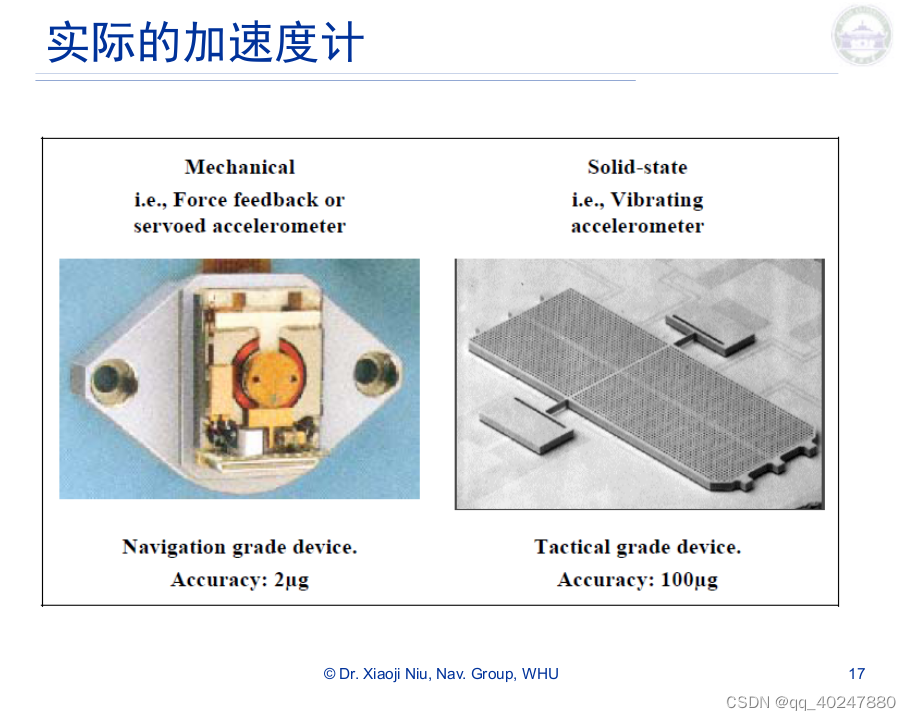
0.0001战略级30m/hr,0.01导航级1nmi/hr,1deg/hr战术级别10nmi/hr,“海里”传统上定义为围绕地球一圈的一角分(一圈等于360度,1度等于60分,故1海里的长度是子午线长度两倍÷360÷60),6,378.1370公里 (≈3,963.191英里; ≈3,443.918海里)。传感器比较:量程/误差=采样率,
陆元九,著名惯性导航及自动控制专家,中国科学院院士,中国工程院院士。1949年获美国麻省理工学院博士学位,是世界上第一位惯性导航专业博士。1956年克服重重阻碍回国报效,任职中国科学院自动化研究所。1958年9月,中国科学技术大学在北京成立,中科院自动化所负责筹建中国科大自动化系,下设四个专业,即自动化、自动化技术工具、远动学、自动化计算技术,自动化所所长武汝扬任自动化系主任,陆元九任校务委员会委员,自动化系副主任。他和武汝扬合作完成的自动化系介绍,生动地描述了自动化科学的现状、功能和特征,描绘了自动化科学的美好发展前景,预言了未来的自动机器会有类似人一样的视觉、听觉、嗅觉,具有“适应环境”和“学习”的本领,能根据环境的变化自动改变自己的特性来适应新环境,能吸取工作中的成功经验与失败教训而不断改进工作,能给自己“看病”——自动预报与清除故障,还能按照人的命令自动设计其他的自动机器,呼吁广大有志于献身自动化科学的青年报考中国科学技术大学自动化系,经过刻苦钻研,创造奇迹,把祖国的自动化科学推向世界的领先水平。
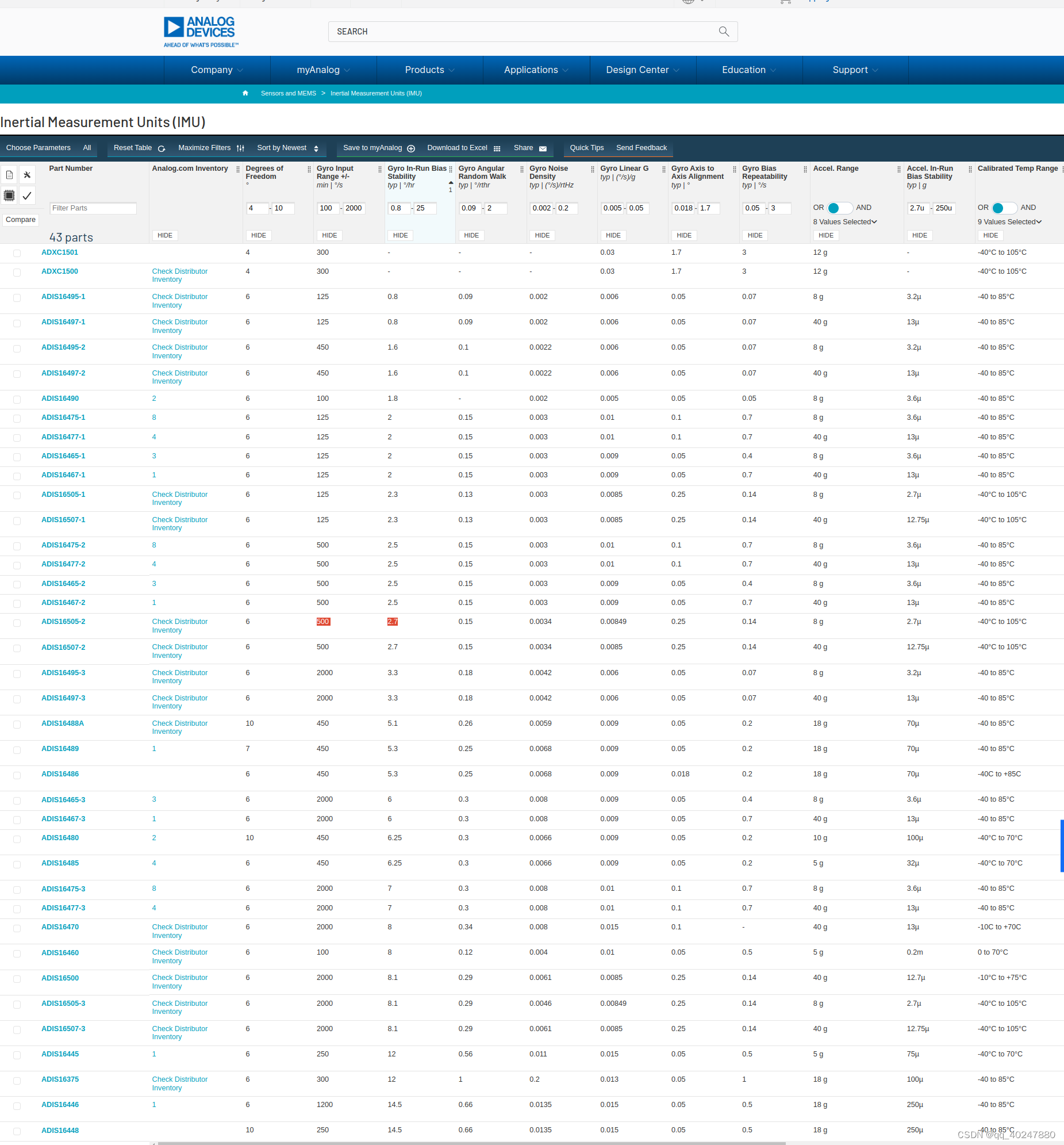
adis16505
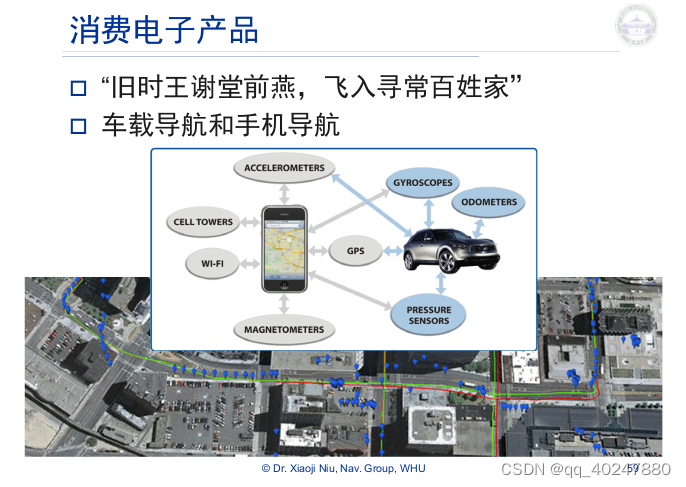
王谢东晋南朝是门阀士族统治时期,琅琊王氏和陈郡谢氏是高门士族的领袖,其次便是陈郡袁氏和兰陵萧氏。陈郡袁氏与谢氏、王氏、萧氏联姻,王导、谢安、袁、萧并称四大盛门。