上一篇伪距与载波相位中我们介绍了伪距的计算方法,也得到了包含![]() 四个未知数的GPS定位基本方程:
四个未知数的GPS定位基本方程:

那么根据这个方程我们怎么来定位呢?

根据我们第一篇GPS基础原理讲过GPS的基本原理,只需已知四颗卫星的测量值,即可组成一个四元方程组,然后解出来这四个未知数。要注意的是这个方程组是一个非线性方程组,因此在实际解算过程中,常用牛顿迭代法来进行。
一、牛顿迭代法
牛顿迭代法是一个常用的解非线性方程组的方法,它将非线性方程组在一个估计解的附近进行线性化,然后求解线性化后的方程组,接着再更新解的估计值。如此反复迭代,直到解的精度满足要求为止。



相关程序思路
/*功能:基于最小二乘的单点定位参数:eAllSVPositions ((n,4) prn, sx, sy, sz, ) :卫星编号和位置 eAllSVPositions ((n,3) PRN CNO Pseudorange) :卫星观测值返回:eWLSSolution 5 unknowns with two clock bias variables
*/Eigen::MatrixXd LeastSquare(Eigen::MatrixXd eAllSVPositions, Eigen::MatrixXd eAllMeasurement){Eigen::MatrixXd eWLSSolution;eWLSSolution.resize(5, 1); // 找到有效的卫星个数(编号一样)int validNumMeasure=0;std::vector<int> validMeasure;for (int idx = 0; idx < eAllMeasurement.rows(); idx++){for (int jdx = 0; jdx < eAllSVPositions.rows(); jdx++){if (int(eAllMeasurement(idx, 0)) == int(eAllSVPositions(jdx, 0))){validNumMeasure++; validMeasure.push_back(int(eAllMeasurement(idx, 0)));}}}// 根据上面的个数构建矩阵大小,获得有效的卫星观测值:validMeasurement,为加权最小二乘准备Eigen::MatrixXd validMeasurement; // for WLS validMeasurement.resize(validNumMeasure,eAllMeasurement.cols());for (int idx = 0; idx < eAllMeasurement.rows(); idx++){for (int jdx = 0; jdx < eAllSVPositions.rows(); jdx++){if (int(eAllMeasurement(idx, 0)) == int(eAllSVPositions(jdx, 0))){for (int kdx = 0; kdx < eAllMeasurement.cols(); kdx++){validMeasurement(idx, kdx) = eAllMeasurement(idx, kdx);}}}}// 有效观测值的行数 int iNumSV = validMeasurement.rows();// 找到有效观测值对应的卫星数据信息(编号,位置)Eigen::MatrixXd eExistingSVPositions; // for WLSeExistingSVPositions.resize(iNumSV, eAllSVPositions.cols());for (int idx = 0; idx < validMeasurement.rows(); idx++){for (int jdx = 0; jdx < eAllSVPositions.rows(); jdx++){if (int(validMeasurement(idx, 0)) == int(eAllSVPositions(jdx, 0))){for (int kdx = 0; kdx < eAllSVPositions.cols(); kdx++){eExistingSVPositions(idx, kdx) = eAllSVPositions(jdx, kdx);}}}} // 初始化结果for (int idx = 0; idx < eWLSSolution.rows(); idx++){eWLSSolution(idx, 0) = 0; // 5*1}// 针对卫星不足的情况if (iNumSV < 5){return eWLSSolution;}bool bWLSConverge = false;int count = 0;while (!bWLSConverge){Eigen::MatrixXd eH_Matrix;eH_Matrix.resize(iNumSV, eWLSSolution.rows());Eigen::MatrixXd eDeltaPr;eDeltaPr.resize(iNumSV, 1);Eigen::MatrixXd eDeltaPos;eDeltaPos.resize(eWLSSolution.rows(), 1);for (int idx = 0; idx < iNumSV; idx++){int prn = int(validMeasurement(idx, 0));double pr = validMeasurement(idx, 2);// Calculating Geometric Distancedouble rs[3], rr[3], e[3];double dGeoDistance;rs[0] = eExistingSVPositions(idx, 1);rs[1] = eExistingSVPositions(idx, 2);rs[2] = eExistingSVPositions(idx, 3);rr[0] = eWLSSolution(0);rr[1] = eWLSSolution(1);rr[2] = eWLSSolution(2);// dGeoDistance = geodist(rs, rr, e);dGeoDistance = sqrt(pow((rs[0] - rr[0]),2) + pow((rs[1] - rr[1]),2) +pow((rs[2] - rr[2]),2));// Making H matrix eH_Matrix(idx, 0) = -(rs[0] - rr[0]) / dGeoDistance;eH_Matrix(idx, 1) = -(rs[1] - rr[1]) / dGeoDistance;eH_Matrix(idx, 2) = -(rs[2] - rr[2]) / dGeoDistance;if (PRNisGPS(prn)){eH_Matrix(idx, 3) = 1;eH_Matrix(idx, 4) = 0;}else if (PRNisBeidou(prn)){eH_Matrix(idx, 3) = 1;eH_Matrix(idx, 4) = 1;}// Making delta pseudorangedouble rcv_clk_bias;if (PRNisGPS(prn)){rcv_clk_bias = eWLSSolution(3); }else if (PRNisBeidou(prn)){rcv_clk_bias = eWLSSolution(4);}// double sv_clk_bias = eExistingSVPositions(idx, 4) * CLIGHT;eDeltaPr(idx, 0) = pr - dGeoDistance + rcv_clk_bias;}// Least Square Estimation eDeltaPos = (eH_Matrix.transpose() * eH_Matrix).ldlt().solve(eH_Matrix.transpose() * eDeltaPr);//eDeltaPos = (eH_Matrix.transpose() * eH_Matrix).inverse() * eH_Matrix.transpose() * eDeltaPr;//eDeltaPos = eH_Matrix.householderQr().solve(eDeltaPr);eWLSSolution(0) += eDeltaPos(0);eWLSSolution(1) += eDeltaPos(1);eWLSSolution(2) += eDeltaPos(2);eWLSSolution(3) += eDeltaPos(3);eWLSSolution(4) += eDeltaPos(4);for (int i = 0; i < 3; ++i){//printf("%f\n", fabs(eDeltaPos(i)));if (fabs(eDeltaPos(i)) >1e-4){bWLSConverge = false;}else { bWLSConverge = true;};}count += 1;if (count > 6)bWLSConverge = true;}std::cout << std::setprecision(12);return eWLSSolution;
}二、定位精度
下面我们把误差也考虑进去,假定测量误差和定位误差都很小,于是线性化后方程组为:


由定位误差协方差阵可以看出,GPS定位误差的方差是测量误差的方差被权系数阵放大的结果,而权系数阵只与卫星的几何分布有关,故GPS的定位误差取决于测量误差和卫星几何分布两个因素。
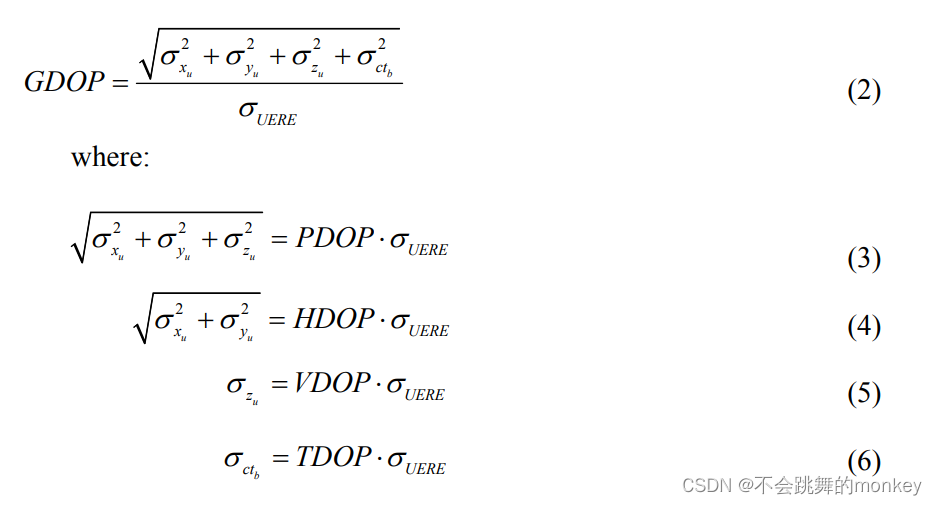
三、精度因子
有了权系数阵,我们就可以计算精度因子了。精度因子用于表示各个方向和时钟的误差放大倍数。假设在站心坐标系(坐标系可参见前文GPS坐标系)下表示的权系数阵为:

一般GPS接收机在输出定位结果的同时都会输出精度因子,在相同测量误差的情况下,精度因子越小,定位精度越高。
精度因子只与卫星的几何分布有关,有一个简单的方法可以大致判断GDOP的大小:以接收机所在位置为锥顶、以各个卫星所在位置为顶点组成一个锥形体,这个锥形体体积越大,相应的GDOP就越小。