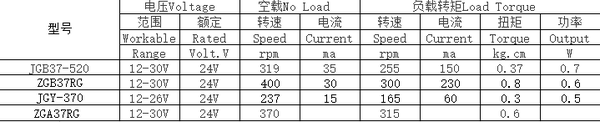
电机的选择
移动机器人的驱动系统,主要由驱动电源、电机和减速装置组成。电机作为一种将电能转换为机械能的配套件,在移动机器人中扮演着重要角色,电机的性能参数及减速装置规格型号的确定直接决定着整车的动力性,即车辆的运动速度和驱动力直接决定整车的动力特性。电机种类繁多,在移动机器人中主要用到的电机包括四种:直流有刷电机、直流无刷电机、直流伺服电机、步进电机。
如今的移动机器人除运动行走外,还集合了很多其他动作功能,如顶升、旋转等动作,还有提升背篓、启动伸缩货叉等,这些动作都需要通过电机输出动力。
移动机器人行走主要采用三种模式——差速、舵轮、迈轮式三种。



直流有刷电机是内含电刷装置的将直流电能转换成机械能(直流电动机),或将机械能转换成直流电能(直流发电机)的旋转电机。直流有刷电机是所有电机的基础,具有启动快、制动及时、可在大范围内平滑地调速、控制电路相对简单等特点。与此同时,因为电刷和换向器的存在,容易产生火花,特定场合容易产生危险;并且,电刷和换向器之间一直存在物理摩擦,使用寿命不长,具有需要后期维护等缺点。在移动机器人中,如果控制电路简单,在对电机使用寿命没有过高要求的场合中,可以选用直流有刷电机。
直流无刷电机由电动机主体和驱动器组成,是一种典型的机电一体化。与有刷电机最明显的不同是,采用电子换向,去掉电刷。电机主体由三个绕组A、B、C组成,采用对称星形接法。转子是永磁体。为了检测转子位置,常内置霍尔传感器。与有刷电机相比,直流无刷电机具有高效率、低能耗、低噪音、超长寿命、高可靠性等优点,但控制相对复杂一些,需要专用的控制器。
直流伺服电机采用永磁同步电机,结构与直流无刷区别不大,只是绕组的反电动势不同,直流无刷的发电动势接近方波,更适合六步方波控制,永磁同步电机的发电动势为正弦波,更适合矢量控制。伺服主要靠脉冲来定位,基本上可以这样理解:伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样与伺服电机接收的脉冲形成呼应,或者叫闭环。如此一来,系统就会知道发出多少脉冲给伺服电机,同时又接收多少脉冲回来,从而能够很精确地控制电机转动,实现精确定位,可以达到0.001mm。与直流无刷电机相同的是,需要专用的驱动器来控制,采用更复杂的矢量控制算法。除采用霍尔传感器来检测转子位置,还会采用编码器来检测转子位置,实现转子任意位置的停止。直流伺服电机具有效率高、响应快、转动平滑、力矩稳定、运行噪声小等优点,可在速度模式和位置模式运行。
步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号时,就驱动步进电机按设定的方向转动一个固定的角度(步距角),其旋转是以固定角度一步一步运行,可以通过控制脉冲个数来控制角位移量。同时,可通过控制脉冲频率来控制电机转动速度,从而达到调速的目的。
移动机器人的行走电机常采用直流伺服电机或直流无刷电机,在对精度要求较高的场合常采用直流伺服电机。根据电机本体和驱动器的形式,可以分为分体式和一体式。分体式的,驱动器和电机本体分开,适用于大功率场合;一体式的,驱动器和电机本体组装在一起,结构紧凑,适用于功率较小、对体积有要求的场合。与直流伺服电机相比,步进电机一般不具有过载能力,速度响应性能比伺服小,主要用在执行机构中。
总体而言,各类电机中,如果从控制精准度来说,则伺服调速精度最高,步进次之,直流有刷及无刷电机最低。伺服电机一般都是被使用在精度要求高的场合,而无刷电机只用在精度不是特别高的地方,步进电机居中,但步进电机的转速没有无刷电机快。不同产品之间,价格也相差悬殊,伺服电机价格最高,无刷电机价格最低。
采购电机的考虑因素主要有几方面:从成本角度看,电机在一台移动机器人中所占比例大体不超过10%,在电机制造商中,上海步科公司和北京和利时公司占据比较大的市场份额。从功能实现的角度看,移动机器人的移动首先需要启动,因此负责输出移动动力的电机需要瞬间扭矩比较高,需要的瞬间功率也比较高。但是,当移动机器人平稳运行时,需要电机输出的功率反而不需要太高。因此,从经济性角度考虑,如果要保证移动机器人顺利启动,就需要电机功率比较大,但是达到平稳运行时就会浪费冗余的功率。因此,移动机器人选择电机,会考虑瞬时过载能力比较强的电机,也就是启动时瞬间输出功率比较大,但是平常正常运行时功率比较小的电机。一般要求其瞬时过载功率能超过其标定功率的2至3倍,这样与直接采购大功率电机相比性价比要高得多。