Hplip分析
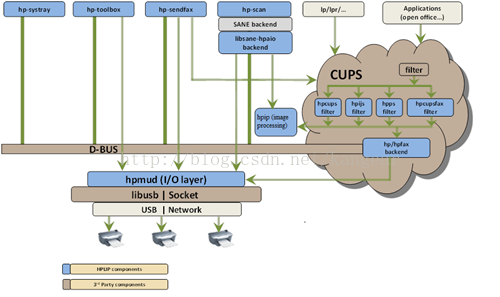
版本是2.14,源码位置:http://hplipopensource.com。图的来源:http://hplipopensource.com/node/128。实践中使用的打印机型号:Deskjet 1010.分析的目的就是搞清楚一个灰色地带---打印机通信.
1.D-Bus初始化流程
D-Bus的初始化同样是在ui4/devmgr5.py开始的。
ui4/devmgr5.py
01 class DevMgr5(QMainWindow, Ui_MainWindow):
02 ......
03 # TODO: Make sbus init mandatory success, else exit
04 def initDBus(self):
05 self.dbus_loop = DBusQtMainLoop(set_as_default=True)
06 self.dbus_avail, self.service, self.session_bus = device.init_dbus(self.dbus_loop)
07 ......
08 # Receive events from the session bus
09 self.session_bus.add_signal_receiver(self.handleSessionSignal, sender_keyword='sender',
10 destination_keyword='dest', interface_keyword='interface',
11 member_keyword='member', path_keyword='path')
12 ......
这里调用了base/device.py中的init_dbus()。从第9行可以看出handleSessionSignal是D-Bus服务器端回调函数。
base/device.py
01 #
02 # DBus Support
03 #
04
05 def init_dbus(dbus_loop=None):
06 ......
07 try:
08 if dbus_loop is None:
09 session_bus = dbus.SessionBus()
10 else:
11 session_bus = dbus.SessionBus(dbus_loop)
12 ......
13 try:
14 log.debug("Connecting to com.hplip.StatusService (try #1)...")
15 service = session_bus.get_object('com.hplip.StatusService', "/com/hplip/StatusService")
16 dbus_avail = True
17 except dbus.exceptions.DBusException, e:
18 try:
19 os.waitpid(-1, os.WNOHANG)
20 except OSError:
21 pass
22
23 path = utils.which('hp-systray')
24 ......
25 log.debug("Running hp-systray: %s --force-startup" % path)
26
27 os.spawnlp(os.P_NOWAIT, path, 'hp-systray', '--force-startup')
28
29 log.debug("Waiting for hp-systray to start...")
30 time.sleep(1)
31
32 t = 2
33 while True:
34 try:
35 log.debug("Connecting to com.hplip.StatusService (try #%d)..." % t)
36 service = session_bus.get_object('com.hplip.StatusService', "/com/hplip/StatusService")
37 ......
38
39 return dbus_avail, service, session_bus
40
41 ......
42
第27行启动了hp-systray作为d-bus的服务器端。D-bus服务器端启动完毕。
2.D-bus服务器hp-systray端启动
启动命令如下:
$ hp-systray --force-startup -g
说明:-g是调试模式启动
if __name__ == '__main__':......if child_pid1:# parent (UI)os.close(w1)...... else: # qt4try:import ui4.systemtray as systrayexcept ImportError:log.error("Unable to load Qt4 support. Is it installed?")mod.unlockInstance()sys.exit(1) try:systray.run(r1)finally:mod.unlockInstance()else:# child (dbus & device i/o [qt4] or dbus [qt3])os.close(r1)if ui_toolkit == 'qt4':r2, w2 = os.pipe()r3, w3 = os.pipe()child_pid2 = os.fork()if child_pid2:# parent (dbus)os.close(r2)import hpssdhpssd.run(w1, w2, r3)else:# child (device i/o)os.close(w2)import hpdiohpdio.run(r2, w3) ......启动了hpssd和hpdio。hpssd前者会从w3管道从读取hpdio写入的打印机状态信息。下面单说hpdio如何获取打印机状态当hpdio run起来的时候会做以下调用run(hpdio.py)->queryDevice(device.py)->status.StatusType10(status.py)->StatusType10Status(status.py)来获取打印机状态。
在queryDevice这个函数中出现了6种与打印机通信方式,分别是:
- Type 1/2 (s: or VSTATUS:) status
- Type 3/9 LaserJet PML
- Type 6: LJ XML
- Type 8: LJ PJL
- Type 10: LEDM
- Type 11: LEDM_FF_CC_0
而我目前分析的这款打印机使用是第5种Type 10: LEDM通信协议 HPMUD_S_EWS_LEDM_CHANNEL。每种通信通信都有关于打印机状态值的定义,另外从这款打印机的DeviceId可以看出应该同时也是支持PJL的,这里先只说第5种LEDM通信方式.LEDM的大体通信方式是基于HTTP,通信USB传输一个HTTP的GET指令,然后再通过USB读取打印机返回的HTTP超文本,一个是XML.
StatusType10Status调用流程:
- StatusType10FetchUrl 从打印机获取状态数据
- # Parse the product status XML 解析xml,提取状态值
- getUrl_LEDM
- LocalOpenerEWS_LEDM().openhp()
- writeEWS_LEDM
- readEWS_LEDM
- readLEDMData
3.刷新状态的流程
toolbox.py
01 else: # qt4
02 ......
03 from ui4.devmgr5 import DevMgr5
04 ......
第三行可以看出启动了ui4目录下的devmgr5这个python。
ui4/devmgr5.py
01 class DevMgr5(QMainWindow, Ui_MainWindow):
02 ......
03 def initUI(self):
04 ......
05 self.DeviceRefreshAction.setIcon(QIcon(load_pixmap("refresh1", "16x16")))
06 self.connect(self.DeviceRefreshAction, SIGNAL("triggered()"), self.DeviceRefreshAction_activated)
07 ......
08 def DeviceRefreshAction_activated(self):
09 self.DeviceRefreshAction.setEnabled(False)
10 self.requestDeviceUpdate()
11 self.DeviceRefreshAction.setEnabled(True)
12 ......
13 def requestDeviceUpdate(self, dev=None, item=None):
14 """ Submit device update request to update thread. """
15
16 if dev is None:
17 dev = self.cur_device
18
19 if dev is not None:
20 dev.error_state = ERROR_STATE_REFRESHING
21 self.updateDevice(dev, update_tab=False)
22
23 self.sendMessage(dev.device_uri, '', EVENT_DEVICE_UPDATE_REQUESTED)
24 ......
25 def sendMessage(self, device_uri, printer_name, event_code, username=prop.username,
26 job_id=0, title=''):
27
28 device.Event(device_uri, printer_name, event_code, username,
29 job_id, title).send_via_dbus(self.session_bus)
30 .....
从第06行可以看出DeviceRefreshAction的槽是DeviceRefreshAction_activated在行8行,接着调用了requestDeviceUpdate,然后调用了sendMessage,然后调用了device.Event。这个在device.py中。在
base/device.py
01 class Event(object):
02 ......
03 def send_via_dbus(self, session_bus, interface='com.hplip.StatusService'):
04 if session_bus is not None and dbus_avail:
05 log.debug("Sending event %d to %s (via dbus)..." % (self.event_code, interface))
06 msg = lowlevel.SignalMessage('/', interface, 'Event')
07 msg.append(signature=self.dbus_fmt, *self.as_tuple())
08 session_bus.send_message(msg)
09 ......
10
这里调用的send_message是获取的d-bus实例的send_message,它在hpdio.py中。
hpdio.py
01 def send_message(device_uri, event_code, bytes_written=0):
02 args = [device_uri, '', event_code, prop.username, 0, '', '', bytes_written]
03 msg = lowlevel.SignalMessage('/', 'com.hplip.StatusService', 'Event')
04 msg.append(signature='ssisissi', *args)
05 SessionBus().send_message(msg)
这里是标准的d-bus通信。D-bus在收到这个消息后,会怎么处理,且看以后分析。以上是向服务器端请求事件,服务器端收到事件后会调用handleSessionSignal回调。
handleSessionSignal -> handleStatusReply -> updateDevice。
4.客户端与服务器端交互
客户端hp-toolbox,服务器端hp-systray.他们分别启动后,如何进行交互是一个重点,基于服务器端是有自己的消息通知和界面显示的,不过只是一般的事件信息。hp-toolbox可以主动获取打印机信息。
服务器端会主动向打印机设备获取状态信息,客户端获取的要是服务器保存好的状态信息,这个基本属于 生产者-消费者 之间的关系。
5.LEDM通信协议
全称: Low End Data Model(在hplib的status.py中有介绍:def StatusType10(func): # Low End Data Model)。目前已经是HP一个专利:专利EP2556480A1.
打开channel调用流程:
openEWS_LEDM -> __openChannel -> hpmudext.open_channel -> hpmud处理
读数据流程:
readEWS_LEDM -> __readChannel -> hpmudext.read_channel -> hpmud处理
写命令流程:
writeEWS_LEDM -> __writeChannel -> hpmudext.write_channel -> hpmud处理
以获取ProductStatusDyn记录一下收发数据的情况。
发送命令(报文):
GET /DevMgmt/ProductStatusDyn.xml HTTP/1.1#015#012Accept: text/plain#015#012Host:localhost#015#012User-Agent:hplip#015#012#015#012<?xml version="1.0" encoding="UTF-8"?>
<!-- THIS DATA SUBJECT TO DISCLAIMER(S) INCLUDED WITH THE PRODUCT OF ORIGIN. -->
<psdyn:ProductStatusDyn xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:xsd="http://www.w3.org/2001/XMLSchema" xmlns:dd="http://www.hp.com/schemas/imaging/con/dictionaries/1.0/" xmlns:ad="http://www.hp.com/schemas/imaging/con/ledm/alertdetails/2007/10/31" xmlns:pscat="http://www.hp.com/schemas/imaging/con/ledm/productstatuscategories/2007/10/31" xmlns:locid="http://www.hp.com/schemas/imaging/con/ledm/localizationids/2007/10/31" xmlns:psdyn="http://www.hp.com/schemas/imaging/con/ledm/productstatusdyn/2007/10/31" xsi:schemaLocation="http://www.hp.com/schemas/imaging/con/dictionaries/1.0/ ../schemas/dd/DataDictionaryMasterLEDM.xsd http://www.hp.com/schemas/imaging/con/ledm/alertdetails/2007/10/31 ../schemas/AlertDetails.xsd http://www.hp.com/schemas/imaging/con/ledm/productstatuscategories/2007/10/31 ../schemas/ProductStatusCategories.xsd http://www.hp.com/schemas/imaging/con/ledm/localizationids/2007/10/31 ../schemas/LocalizationIds.xsd http://www.hp.com/schemas/imaging/con/ledm/productstatusdyn/2007/10/31 ../schemas/ProductStatusDyn.xsd"><dd:Version><dd:Revision>SVN-IPG-LEDM.216</dd:Revision><dd:Date>2011-02-08</dd:Date></dd:Version><psdyn:Status><pscat:StatusCategory>closeDoorOrCover</pscat:StatusCategory><locid:StringId>65568</locid:StringId></psdyn:Status><psdyn:AlertTable><dd:ModificationNumber>6</dd:ModificationNumber><psdyn:Alert><ad:ProductStatusAlertID>closeDoorOrCover</ad:ProductStatusAlertID><locid:StringId>65568</locid:StringId><dd:SequenceNumber>5</dd:SequenceNumber><ad:Severity>Error</ad:Severity><ad:AlertPriority>1</ad:AlertPriority><ad:AlertDetails><ad:AlertDetailsDoorCoverLocation>cover</ad:AlertDetailsDoorCoverLocation></ad:AlertDetails><dd:ResourceURI>/DevMgmt/ProductConfigDyn.xml</dd:ResourceURI><dd:ResourceType>ledm:hpLedmProductConfigDyn</dd:ResourceType></psdyn:Alert><psdyn:Alert><ad:ProductStatusAlertID>cartridgeMissing</ad:ProductStatusAlertID><locid:StringId>65537</locid:StringId><dd:SequenceNumber>4</dd:SequenceNumber><ad:Severity>Error</ad:Severity><ad:AlertPriority>11</ad:AlertPriority><ad:AlertDetails><ad:AlertDetailsMarkerColor>Black</ad:AlertDetailsMarkerColor><ad:AlertDetailsConsumableTypeEnum>inkCartridge</ad:AlertDetailsConsumableTypeEnum><ad:AlertDetailsMarkerLocation>1</ad:AlertDetailsMarkerLocation></ad:AlertDetails><dd:ResourceURI>/DevMgmt/ConsumableConfigDyn.xml</dd:ResourceURI><dd:ResourceType>ledm:hpLedmConsumableConfigDyn</dd:ResourceType></psdyn:Alert><psdyn:Alert><ad:ProductStatusAlertID>cartridgeMissing</ad:ProductStatusAlertID><locid:StringId>65537</locid:StringId><dd:SequenceNumber>3</dd:SequenceNumber><ad:Severity>Error</ad:Severity><ad:AlertPriority>11</ad:AlertPriority><ad:AlertDetails><ad:AlertDetailsMarkerColor>CyanMagentaYellow</ad:AlertDetailsMarkerColor><ad:AlertDetailsConsumableTypeEnum>inkCartridge</ad:AlertDetailsConsumableTypeEnum><ad:AlertDetailsMarkerLocation>0</ad:AlertDetailsMarkerLocation></ad:AlertDetails><dd:ResourceURI>/DevMgmt/ConsumableConfigDyn.xml</dd:ResourceURI><dd:ResourceType>ledm:hpLedmConsumableConfigDyn</dd:ResourceType></psdyn:Alert></psdyn:AlertTable>
</psdyn:ProductStatusDyn>6.hpmud分析
MUlti-point transport Driver or HPMUD represents the I/O layer for HPLIP. HPMUD does not depend on Linux specific libusb extensions. This means any UNIX/Linux derivative that supports libusb may work with HPLIP. A public HPLIP "C" API is exposed through hpmud. See hpmud.h for documentation. A python wrapper for hpmud, called hpmudext, is also available.
以上是官网介绍,如开头图中所示,hpmud是负责真正和打印机设备进行通信的,它基于libusb开发,所以可以运行于所以含libusb的系统中。hpmud同样实现了多种通信方式:
- musb 基于目前常用的libusb通信.(本次采用打印机正是用这种方式)
- musb_libusb01 基于目前较老版本的libusb通信.
- jd 基于jetdirect 的打印机通信.
- pml 和python层对应,是一种打印语言
- pp Parallel port 并口通信方式
7.C语言实现状态获取
#include <stdio.h>
#include <string.h>
#include <hpmud.h>
#include <malloc.h>#ifdef DEBUG
#define debug(fmt,args...) debug (fmt ,##args)
#define debugX(level,fmt,args...) if (DEBUG>=level) debug(fmt,##args);
#else
#define debug(fmt,args...)
#define debugX(level,fmt,args...)
#endif /* DEBUG */static HPMUD_DEVICE dd;
static HPMUD_CHANNEL cd;#define MALLOC(type, n) (type*)malloc(n*sizeof(type))static int __readChannel(int bytes_to_read, int* reply, int allow_short_read, int timeout)
{bytes_to_read = 1024;char data[1024] = {0};int ret = 0;int num_bytes = 0;int len = 0;int *p = reply;while (1){ret = hpmud_read_channel(dd, cd, data, 1024, timeout, &num_bytes);debug("Result code=%d\n", ret);len = strlen(data);if(ret == HPMUD_R_IO_TIMEOUT){debug("I/O timeout\n");break;}if(ret != HPMUD_R_OK){debug("Channel read error\n");break;}//debug("read_buf:%s\n", data);if(!len){debug("End of data\n");break;}memcpy(p, data, len);if (num_bytes == bytes_to_read){debug("Full read complete.\n");break;}if (allow_short_read && (num_bytes < bytes_to_read)){debug("Allowed short read of %d of %d bytes complete.\n", num_bytes, bytes_to_read);break;}}debug("Saved %d total bytes to stream.\n", num_bytes);return num_bytes;
}void readLEDMData()
{int timeout = 6;const char* END_OF_DATA="0\r\n\r\n";int bytes_read = 0;int bytes_requested = 1024;char temp_buf[1024] = {0}; //大小要一致int chunkedFlag = 1;char* result = NULL;char *reply = (int*)MALLOC(unsigned char, 5*1024);char *offset = reply;if(reply == NULL){fprintf(stderr, "MALLC FAILURE!\n");return;}bytes_read = __readChannel(bytes_requested, reply, 1, timeout);offset += bytes_read;//debug("%s:%s\n", __func__, reply);// 默认chunked分块.chunkedFlag = 1;//result = strtok(reply, "\n");//debug("result=%s\n", result);while (bytes_read > 0){bytes_read = __readChannel(bytes_requested, (int*)temp_buf, 1, timeout);//reply.write(temp_buf.getvalue());memcpy(offset, temp_buf, bytes_read);debug("%s:%s\n", __func__, offset);offset += bytes_read;if(!chunkedFlag) // Unchunked data{// do nothing!}else // Chunked data end{//END_OF_DATA == temp_buf.getvalue();if(!strncmp(temp_buf, END_OF_DATA, sizeof(END_OF_DATA)))break;}}printf("%s:%s\n", __func__, reply);free(reply);reply = NULL;
}int main(void)
{enum HPMUD_RESULT res;const char *device_uri = "hp:/usb/Deskjet_1010_series?serial=CN39I18M1805S8";enum HPMUD_IO_MODE io_mode = HPMUD_RAW_MODE;// 打开设备获得res = hpmud_open_device(device_uri, io_mode, &dd);if (res != HPMUD_R_OK){fprintf(stderr, "error opening device (code=%d)\n", res);return 1;}// 打开频道获得频道idres = hpmud_open_channel(dd, HPMUD_S_EWS_LEDM_CHANNEL, &cd);if (res != HPMUD_R_OK){fprintf(stderr, "error opening channel (code=%d)\n", res);return 1;}char buf[1024] = "GET /DevMgmt/ProductStatusDyn.xml HTTP/1.1\r\nAccept: text/plain\r\nHost:localhost\r\nUser-Agent:hplip\r\n\r\n";//char ConsumableConfigDyn[] = "GET /DevMgmt/ConsumableConfigDyn.xml HTTP/1.1#015#012Accept: text/plain#015#012Host:localhost#015#012User-Agent:hplip#015#012#015#012";int bit = 0;// 写入命令res = hpmud_write_channel(dd, cd, buf, 100, 6, &bit);if (res != HPMUD_R_OK){fprintf(stderr, "error hpmud_write_channel (code=%d)\n", res);return 1;}readLEDMData();return 0;hpmud_close_channel(dd, cd);hpmud_close_device(dd);return 0;
}本程序会从打印出所得到状态的数据,pscat:StatusCategory字段中的就是状态值了,其实能到了如《 关于打印机状态的获取》提到15个左右的状态,但是这个协议所规定的状态全部罗列出来:
| 字串 | 状态 | 编号 |
| processing | STATUS_PRINTER_PRINTING | 1002 |
| ready | STATUS_PRINTER_IDLE | 1000 |
| closeDoorOrCover | STATUS_PRINTER_DOOR_OPEN | 1802 |
| shuttingDown | STATUS_PRINTER_TURNING_OFF | 1003 |
| cancelJob | STATUS_PRINTER_CANCELING | 1005 |
| trayEmptyOrOpen | STATUS_PRINTER_OUT_OF_PAPER | 1009 |
| jamInPrinter | STATUS_PRINTER_MEDIA_JAM | 1014 |
| hardError | STATUS_PRINTER_HARD_ERROR | 1018 |
| outputBinFull | STATUS_PRINTER_OUTPUT_BIN_FULL | 1002 |
| unexpectedSizeInTray sizeMismatchInTray | STATUS_PRINTER_MEDIA_SIZE_MISMATCH | 1023 |
| insertOrCloseTray2 | STATUS_PRINTER_TRAY_2_MISSING | 1029 |
| scannerError | EVENT_SCANNER_FAIL | 2002 |
| scanProcessing | EVENT_START_SCAN_JOB | 2000 |
| scannerAdfLoaded | EVENT_SCAN_ADF_LOADED | 2004 |
| scanToDestinationNotSet | EVENT_SCAN_TO_DESTINATION_NOTSET | 2005 |
| scanWaitingForPC | EVENT_SCAN_WAITING_FOR_PC | 2006 |
| scannerAdfJam | EVENT_SCAN_ADF_JAM | 2007 |
| scannerAdfDoorOpen | EVENT_SCAN_ADF_DOOR_OPEN | 2008 |
| faxProcessing | EVENT_START_FAX_JOB | 3000 |
| faxSending | STATUS_FAX_TX_ACTIVE | 3004 |
| faxReceiving | STATUS_FAX_RX_ACTIVE | 3005 |
| faxDialing | EVENT_FAX_DIALING | 3006 |
| faxConnecting | EVENT_FAX_CONNECTING | 3007 |
| faxSendError | EVENT_FAX_SEND_ERROR | 3008 |
| faxErrorStorageFull | EVENT_FAX_ERROR_STORAGE_FULL | 3009 |
| faxReceiveError | EVENT_FAX_RECV_ERROR | 3010 |
| faxBlocking | EVENT_FAX_BLOCKING | 3011 |
| inPowerSave | STATUS_PRINTER_POWER_SAVE | 1046 |
| incorrectCartridge | STATUS_PRINTER_CARTRIDGE_WRONG | 1047 |
| cartridgeMissing | STATUS_PRINTER_CARTRIDGE_MISSING | 1048 |
| missingPrintHead | STATUS_PRINTER_PRINTHEAD_MISSING
| 1049 |
| scannerADFMispick | STATUS_SCANNER_ADF_MISPICK | 1050 |
| mediaTooShortToAutoDuplex | STATUS_PRINTER_PAPER_TOO_SHORT_TO_AUTODUPLEX | 1051 |
| insertOrCloseTray | STATUS_PRINTER_TRAY_2_3_DOOR_OPEN | 1052 |
| inkTooLowToPrime | STATUS_PRINTER_INK_TOO_LOW_TO_PRIME | 1053 |
| cartridgeVeryLow | STATUS_PRINTER_VERY_LOW_ON_INK | 1054 |
| wasteMarkerCollectorAlmostFull | STATUS_PRINTER_SERVICE_INK_CONTAINER_ALMOST_FULL | 1055 |
| wasteMarkerCollectorFull | STATUS_PRINTER_SERVICE_INK_CONTAINER_FULL | 1056 |
| wasteMarkerCollectorFullPrompt | STATUS_PRINTER_SERVICE_INK_CONTAINER_FULL_PROMPT | 1057 |
| missingDuplexer | STATUS_PRINTER_DUPLEX_MODULE_MISSING | 1058 |
| printBarStall | STATUS_PRINTER_PRINTHEAD_JAM | 1059 |
| outputBinClosed | STATUS_PRINTER_CLEAR_OUTPUT_AREA | 1060 |
| outputBinOpened | STATUS_PRINTER_CLEAR_OUTPUT_AREA | 1060 |
| reseatDuplexer | STATUS_PRINTER_RESEAT_DUPLEXER | 1061 |
| unexpectedTypeInTray | STATUS_PRINTER_MEDIA_TYPE_MISMATCH | 1042 |
| manuallyFeed | STATUS_MANUALLY_FEED | 1062 |
|
| STATUS_UNKNOWN_CODE | 1065 |
扩展:目前只是上一个课题的总结。这之后的应用还有不少的问题,如何应用。以及和利用设备节点打印是否冲突,以及能否打印也基于hpmud。。。
8.意外收获
老天真的会眷恋努力的人,刚在PC上实现基于HPMUD的状态获取,考虑着进行三步走中的更为繁琐的后两步(移植到嵌入式Linux+移植到Android)的时候,上天又送我一份大礼--打印机状态获取的另一种方式:通过DeviceId。
这个可能不一定适合所有打印机,但是可以确定的是完全适应我现在正在调试的这款。关于DeviceId从一开始看打印机相关的东西的时候最先接触到的就是这个DeviceId,可以说我对它的感情也是跌宕起伏。从一喜得DeviceId,到觉得其作用单一,到现在的强大无比。
下面说点正经的,在《互联网打印协议-rfc2911》的printer-state-reasons章节规定了打印机异常状态码。也就是说除了使用HP自定义的LEDM获取的状态外,同样还可以通过标准的IPP协议得到状态值。由此也能延伸出一个问题,CUPS应该也可以获取打印机状态了,但是却没有做任何显示。至于是为什么,这个还是比较玄乎。
具体来看DeviceID中含有状态的“S”字段:S:038000C484a01021002c1f01100c2881100;首先说明的是这个其中的都是16进制的数。前两位是版本信息,根据版本信息不同,状态码所在的位置也不同,比如这里的版本号为03,那么状态码在第16位的两位数这里为00转换为10进制也是0,这个状态代表空闲。有时候代码比语言更有说服力。
java版本:
public int getPrinterStatusCode() {String deviceId = getPrinterDeivceId();int ippStatus = -1;int pSf = 2;if(deviceId == null)return ippStatus;// somthingString str[] = deviceId.split(";S:");if(str.length > 1){if(str[1] != null){int ver=Integer.parseInt(str[1].substring(0,2), 16);/* Position pointer to printer state subfield. */switch (ver){case 0:case 1:case 2:pSf+=12;break;case 3:pSf+=14;break;case 4:pSf+=18;break;default:Slog.w(LOG_TAG, "WARNING: unknown S-field version=" + ver + "\n");pSf+=12;break;}ippStatus = Integer.parseInt(str[1].substring(pSf, pSf + 2), 16);}}return ippStatus;}C版本:
static int get_printer_status_code(const char* device_id)
{const char* id = device_id;char *pSf;int ver;int status = 0;/* Check for valid S-field in device id string. */if ((pSf = strstr(id, ";S:")) == NULL){/* No S-field, use status register instead of device id. *//* do nothing */goto bugout;}else{/* Valid S-field, get version number. */pSf+=3;ver = 0;HEX2INT(*pSf, ver);pSf++;ver = ver << 4;HEX2INT(*pSf, ver);pSf++;/* Position pointer to printer state subfield. */switch (ver){case 0:case 1:case 2:pSf+=12;break;case 3:pSf+=14;break;case 4:pSf+=18;break;default:printf("WARNING: unknown S-field version=%d\n", ver);pSf+=12;break;}/* Extract VStatus.*/status = 0;HEX2INT(*pSf, status);pSf++;status = status << 4;HEX2INT(*pSf, status);}printf("status:%d\n", status);bugout:return status;
}状态码对应关系:
VSTATUS_IDLE = 0,VSTATUS_BUSY = 1,VSTATUS_PRNT = 2, /* io printing */VSTATUS_OFFF = 3, /* turning off */VSTATUS_RPRT = 4, /* report printing */VSTATUS_CNCL = 5, /* canceling */VSTATUS_IOST = 6, /* io stall */VSTATUS_DRYW = 7, /* dry time wait */VSTATUS_PENC = 8, /* pen change */VSTATUS_OOPA = 9, /* out of paper */VSTATUS_BNEJ = 10, /* banner eject needed */VSTATUS_BNMZ = 11, /* banner mismatch */VSTATUS_PHMZ = 12, /* photo mismatch */VSTATUS_DPMZ = 13, /* duplex mismatch */VSTATUS_PAJM = 14, /* media jam */VSTATUS_CARS = 15, /* carriage stall */VSTATUS_PAPS = 16, /* paper stall */VSTATUS_PENF = 17, /* pen failure */VSTATUS_ERRO = 18, /* hard error */VSTATUS_PWDN = 19, /* power down */VSTATUS_FPTS = 20, /* front panel test */VSTATUS_CLNO = 21 /* clean out tray missing */文章至此该结束了。
其它:
Linux打印驱动知识点
1.关于DeviceId各段意义见《ieee_1284》
2.关于LEDM见《DISCOVERING PC-CONNECTED DEVICES》
3.Syslog见《syslog-example》经过实践输出到了/var/log/syslog.
4.关于Eclipse CD高版本的Memory View不能显示对应的Text.换成Helios Service Release 2使用New Rendrings->Traditional.
5.关于PJL(打印机控制语言)《Printer Job Language Technical Reference Manual》
6.最终选择了基于deviceId的方法来实现,所以暂时不再用hpmud的方法了,但是已经代码已经实现了printDate和基于ledm获取打印机的状态信息。
#include <stdio.h>
#include <string.h>
#include <hpmud.h>
#include <malloc.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#include <pthread.h>
#include <stdlib.h>
#include <stdarg.h>//#define DEBUG#ifdef DEBUG
#define debug(fmt,args...) printf (fmt ,##args)
#define debugX(level,fmt,args...) if (DEBUG>=level) debug(fmt,##args);
#else
#define debug(fmt,args...)
#define debugX(level,fmt,args...)
#endif /* DEBUG */// hp printer device
static HPMUD_DEVICE hd;#define MALLOC(type, n) (type*)malloc(n*sizeof(type))// HPMUD_I_MAX
#define HPMUD_I_MAX 18
static int channels[HPMUD_I_MAX] = {0};typedef HPMUD_CHANNEL(open_channel)(void);
typedef int(read_func)(int bytes_requested, char* reply, int timeout);enum BACKEND_RESULT
{BACKEND_OK = 0,BACKEND_FAILED = 1, /* use error-policy */BACKEND_HOLD = 3, /* hold job */BACKEND_STOP = 4, /* stop queue */BACKEND_CANCEL = 5 /* cancel job */
};struct pjl_attributes
{int pjl_device; /* 0=disabled, 1=enabled */int current_status;int eoj_pages; /* end-of-job pages */int abort; /* 0=no, 1=yes */int done; /* 0=no, 1=yes */HPMUD_DEVICE dd;HPMUD_CHANNEL cd;pthread_t tid;pthread_mutex_t mutex;pthread_cond_t done_cond;
};#define _STRINGIZE(x) #x
#define STRINGIZE(x) _STRINGIZE(x)#define BUG(args...) bug(__FILE__ " " STRINGIZE(__LINE__) ": " args)#ifdef HP_DEBUG#define DBG(args...) syslog(LOG_INFO, __FILE__ " " STRINGIZE(__LINE__) ": " args)#define DBG_DUMP(data, size) sysdump((data), (size))#define DBG_SZ(args...) syslog(LOG_INFO, args)
#else#define DBG(args...)#define DBG_DUMP(data, size)#define DBG_SZ(args...)
#endif#define RETRY_TIMEOUT 30 /* seconds */
#define EXCEPTION_TIMEOUT 45 /* seconds */#define NFAULT_BIT 0x08
#define PERROR_BIT 0x20#define OOP (NFAULT_BIT | PERROR_BIT)
#define JAMMED (PERROR_BIT)
#define ERROR_TRAP (0)#define STATUS_MASK (NFAULT_BIT | PERROR_BIT)#define DEVICE_IS_OOP(reg) ((reg & STATUS_MASK) == OOP)
#define DEVICE_PAPER_JAMMED(reg) ((reg & STATUS_MASK) == JAMMED)
#define DEVICE_IO_TRAP(reg) ((reg & STATUS_MASK) == ERROR_TRAP)#define HEX2INT(x, i) if (x >= '0' && x <= '9') i |= x - '0'; \else if (x >= 'A' && x <= 'F') i |= 0xA + x - 'A'; \else if (x >= 'a' && x <= 'f') i |= 0xA + x - 'a'/* Definitions for hpLogLevel in cupsd.conf. */
#define BASIC_LOG 1
#define SAVE_PCL_FILE 2
#define SAVE_INPUT_RASTERS 4
#define SEND_TO_PRINTER_ALSO 8/* Actual vstatus codes are mapped to 1000+vstatus for DeviceError messages. */
typedef enum
{VSTATUS_IDLE = 1000,VSTATUS_BUSY,VSTATUS_PRNT, /* io printing */VSTATUS_OFFF, /* turning off */VSTATUS_RPRT, /* report printing */VSTATUS_CNCL, /* canceling */VSTATUS_IOST, /* io stall */VSTATUS_DRYW, /* dry time wait */VSTATUS_PENC, /* pen change */VSTATUS_OOPA, /* out of paper */VSTATUS_BNEJ, /* banner eject needed */VSTATUS_BNMZ, /* banner mismatch */VSTATUS_PHMZ, /* photo mismatch */VSTATUS_DPMZ, /* duplex mismatch */VSTATUS_PAJM, /* media jam */VSTATUS_CARS, /* carriage stall */VSTATUS_PAPS, /* paper stall */VSTATUS_PENF, /* pen failure */VSTATUS_ERRO, /* hard error */VSTATUS_PWDN, /* power down */VSTATUS_FPTS, /* front panel test */VSTATUS_CLNO /* clean out tray missing */
} VSTATUS;#define EVENT_START_JOB 500
#define EVENT_END_JOB 501//const char pjl_status_cmd[] = "\e%-12345X@PJL INFO STATUS \r\n\e%-12345X";
static const char pjl_ustatus_cmd[] = "\e%-12345X@PJL USTATUS DEVICE = ON \r\n@PJL USTATUS JOB = ON \r\n@PJL JOB \r\n\e%-12345X";
static const char pjl_job_end_cmd[] = "\e%-12345X@PJL EOJ \r\n\e%-12345X";
static const char pjl_ustatus_off_cmd[] = "\e%-12345X@PJL USTATUSOFF \r\n\e%-12345X";static int bug(const char *fmt, ...)
{char buf[256];va_list args;int n;va_start(args, fmt);if ((n = vsnprintf(buf, 256, fmt, args)) == -1)buf[255] = 0; /* output was truncated */fprintf(stderr, "%s", buf);//syslog(LOG_ERR, "%s", buf);fflush(stderr);va_end(args);return n;
}/*** 由于使用的数组来实现python中的字典* 所以要将字符串转化为对应数字* openChannle和closeChannel中会用到*/
static int get_service_name_num(char* service_name)
{int ser_name_id = 0;if(!strncmp(HPMUD_S_PRINT_CHANNEL, service_name, strlen(service_name)))ser_name_id = 1;else if(!strncmp(HPMUD_S_PML_CHANNEL, service_name, strlen(service_name)))ser_name_id = 2;else if(!strncmp(HPMUD_S_SCAN_CHANNEL, service_name, strlen(service_name)))ser_name_id = 3;else if(!strncmp(HPMUD_S_FAX_SEND_CHANNEL, service_name, strlen(service_name)))ser_name_id = 4;else if(!strncmp(HPMUD_S_CONFIG_UPLOAD_CHANNEL, service_name, strlen(service_name)))ser_name_id = 5;else if(!strncmp(HPMUD_S_CONFIG_DOWNLOAD_CHANNEL, service_name, strlen(service_name)))ser_name_id = 6;else if(!strncmp(HPMUD_S_MEMORY_CARD_CHANNEL, service_name, strlen(service_name)))ser_name_id = 7;else if(!strncmp(HPMUD_S_EWS_CHANNEL, service_name, strlen(service_name)))ser_name_id = 8;else if(!strncmp(HPMUD_S_EWS_LEDM_CHANNEL, service_name, strlen(service_name)))ser_name_id = 9;else if(!strncmp(HPMUD_S_SOAP_SCAN, service_name, strlen(service_name)))ser_name_id = 10;else if(!strncmp(HPMUD_S_SOAP_FAX, service_name, strlen(service_name)))ser_name_id = 11;else if(!strncmp(HPMUD_S_DEVMGMT_CHANNEL, service_name, strlen(service_name)))ser_name_id = 12;else if(!strncmp(HPMUD_S_MARVELL_SCAN_CHANNEL, service_name, strlen(service_name)))ser_name_id = 13;else if(!strncmp(HPMUD_S_MARVELL_FAX_CHANNEL, service_name, strlen(service_name)))ser_name_id = 14;else if(!strncmp(HPMUD_S_LEDM_SCAN, service_name, strlen(service_name)))ser_name_id = 15;else if(!strncmp(HPMUD_S_WIFI_CHANNEL, service_name, strlen(service_name)))ser_name_id = 16;elseser_name_id = 0;return ser_name_id;
}static int __closeChannel(char* service_name)
{int result_code = 0;int ser_name_id = get_service_name_num(service_name);//if not self.mq['io-mode'] == IO_MODE_UNI and// if self.io_state == IO_STATE_HP_OPEN:// service_name = service_name.upper();if(channels[ser_name_id] != 0){printf("Closing %s channel...\n", service_name);result_code = hpmud_close_channel(hd, channels[ser_name_id]);if (result_code != HPMUD_R_OK){fprintf(stderr, "error hpmud_close_channel (code=%d)\n", result_code);return 1;}else{channels[ser_name_id] = 0;}}return 0;
}/** open channel*/
static int __openChannel(char* service_name)
{int result_code = 0;int channel_id = 0;HPMUD_CHANNEL ret = 0;int ser_name_id = get_service_name_num(service_name);if (channels[ser_name_id] == 0){printf("Opening %s channel...\n", service_name);result_code = hpmud_open_channel(hd, service_name, &channel_id);if (result_code != HPMUD_R_OK){fprintf(stderr, "error opening channel (code=%d)\n", result_code);exit(1);}else{channels[ser_name_id] = channel_id;debug("channel-id=%d\n", channel_id);ret = channel_id;}}else{printf("already open!\n");ret = channels[ser_name_id];}return ret;
}/** read channel*/
static int __readChannel(open_channel opener, int bytes_to_read, char* reply, int allow_short_read, int timeout)
{bytes_to_read = 1024;char data[1024] = {0};int ret = 0;int num_bytes = 0;int len = 0;char *p = reply;HPMUD_CHANNEL channel_id = opener();while (1){ret = hpmud_read_channel(hd, channel_id, data, 1024, timeout, &num_bytes);debug("Result code=%d\n", ret);len = strlen(data);if(ret == HPMUD_R_IO_TIMEOUT){debug("I/O timeout\n");break;}if(ret != HPMUD_R_OK){debug("Channel read error\n");break;}//debug("read_buf:%s\n", data);if(!len){debug("End of data\n");break;}memcpy(p, data, len);if (num_bytes == bytes_to_read){debug("Full read complete.\n");break;}if (allow_short_read && (num_bytes < bytes_to_read)){debug("Allowed short read of %d of %d bytes complete.\n", num_bytes, bytes_to_read);break;}}debug("Saved %d total bytes to stream.\n", num_bytes);return num_bytes;
}/*** write channel*/
static int __writeChannel(open_channel opener, const char* data, int total_bytes_to_write)
{HPMUD_DEVICE device_id = hd;HPMUD_CHANNEL channel_id = opener();int result_code = 0;int bytes_written = 0;const char* buffer = data;int bytes_out = 0;int max_message_len = 16384;int timeout = 45;int bytes_to_write = total_bytes_to_write;while(bytes_to_write > 0){result_code = hpmud_write_channel(device_id, channel_id, buffer, bytes_to_write < max_message_len ? bytes_to_write : max_message_len, timeout, &bytes_written);printf("Result code=%d\n", result_code);if (result_code != HPMUD_R_OK){fprintf(stderr, "Channel write error\n");return -1;}buffer += max_message_len;bytes_out += bytes_written;bytes_to_write -= bytes_written;}if (total_bytes_to_write != bytes_out){printf("total_bytes_to_write =%d =\\= bytes_out=%d\n", total_bytes_to_write, bytes_out);return -1;}//printf("%s end\n", __func__);return bytes_out;
}static HPMUD_CHANNEL openEWS_LEDM()
{return __openChannel(HPMUD_S_EWS_LEDM_CHANNEL);
}static HPMUD_CHANNEL openPrint()
{return __openChannel(HPMUD_S_PRINT_CHANNEL);
}static int closePrint(void)
{return __closeChannel(HPMUD_S_PRINT_CHANNEL);
}static int closeEWS_LEDM(void)
{return __closeChannel(HPMUD_S_EWS_LEDM_CHANNEL);
}static int readEWS_LEDM(int bytes_requested, char* reply, int timeout)
{open_channel* opener = openEWS_LEDM;return __readChannel(opener, bytes_requested, reply, 1, timeout);
}static int writePrint(const char* data, int len)
{open_channel* opener = openPrint;int ret = EXIT_FAILURE;int result_code = 0;//TODO:delect hpmud_write_channel/* Enable unsolicited status. *///ret = hpmud_write_channel(hd, channel_id, pjl_ustatus_cmd, sizeof(pjl_ustatus_cmd)-1, 5, &bytes_written);result_code = __writeChannel(opener, data, len);if(result_code != len){printf("ret != len(%s:%u,%s)\n", __FILE__, __LINE__, __func__);goto bugout;}/* Look for job end status. *///ret = hpmud_write_channel(hd, channel_id, pjl_ustatus_off_cmd, sizeof(pjl_ustatus_off_cmd)-1, 5, &bytes_written);result_code = __writeChannel(opener, pjl_job_end_cmd, sizeof(pjl_job_end_cmd)-1);if(result_code != (sizeof(pjl_job_end_cmd)-1)){printf("ret != len(%s:%u,%s)\n", __FILE__, __LINE__, __func__);goto bugout;}ret = EXIT_SUCCESS;
bugout:return ret;
}static int writeEWS_LEDM(const char* data, int len)
{open_channel* opener = openEWS_LEDM;return __writeChannel(opener, data, len);
}static void readLEDMData(read_func* func, char *reply)
{int timeout = 6;const char* END_OF_DATA="0\r\n\r\n";int bytes_read = 0;int bytes_requested = 1024;char temp_buf[1024] = {0}; //大小要一致int chunkedFlag = 1;char *offset = reply;if(reply == NULL){fprintf(stderr, "MALLC FAILURE!\n");return;}bytes_read = func(bytes_requested, reply, timeout);offset += bytes_read;//debug("%s:%s\n", __func__, reply);// 默认chunked分块.chunkedFlag = 1;//result = strtok(reply, "\n");//debug("result=%s\n", result);while (bytes_read > 0){bytes_read = readEWS_LEDM(bytes_requested, (char*)temp_buf, timeout);//reply.write(temp_buf.getvalue());memcpy(offset, temp_buf, bytes_read);debug("%s:%s\n", __func__, offset);offset += bytes_read;if(!chunkedFlag) // Unchunked data{// do nothing!}else // Chunked data end{//END_OF_DATA == temp_buf.getvalue();if(!strncmp(temp_buf, END_OF_DATA, sizeof(END_OF_DATA)))break;}}printf("%s:%s\n", __func__, reply);}static int open_hp(const char* url, char* reply)
{char data[512] = {0};debug("open_hp(%s)\n", url);// match_obj = http_pat_url.search(url)
// loc = url.split("=")[url.count("=")]openEWS_LEDM();sprintf(data, "GET %s HTTP/1.1\r\nAccept: text/plain\r\nHost:localhost\r\nUser-Agent:hplip\r\n\r\n", url);writeEWS_LEDM(data, strlen(data));//while dev.readEWS_LEDM(512, reply, timeout=3)://passread_func* func = readEWS_LEDM;readLEDMData(func, reply);//reply.seek(0);//return reply.getvalue();return 0;}
void getEWSUrl_LEDM(const char* url, char* reply)
{
// int self, url, stream, footer;
// url2 = "%s&loc=%s" % (self.device_uri.replace('hpfax:', 'hp:'), url);
// data = self;
// opener = LocalOpenerEWS_LEDM({});
// opener.open_hp(url2, data);open_hp(url, reply);closeEWS_LEDM();
}void printData()
{char *buf = (char*)MALLOC(unsigned char, 107968);if(buf == NULL){fprintf(stderr, "MALLC FAILURE!\n");return;}int fd = open("/home/kangear/bin.bin", O_RDONLY);if(fd == -1){fprintf(stderr, "open file error!\n");return;}int num = read(fd, buf, 107968);if(num == -1){fprintf(stderr, "read file error!\n");return;}writePrint(buf, num);close(fd);free(buf);buf = NULL;
}/*** device discovery* if there is hp device return EXIT_SUCCESS, but EXIT_FAILURE.*/
static int device_discovery()
{char buf[HPMUD_LINE_SIZE*64];int cnt=0, bytes_read, r=EXIT_FAILURE;enum HPMUD_RESULT stat;stat = hpmud_probe_devices(HPMUD_BUS_ALL, buf, sizeof(buf), &cnt, &bytes_read);if (stat != HPMUD_R_OK)goto bugout;if (cnt == 0){
#ifdef HAVE_CUPS11fprintf(stdout, "direct hp:/no_device_found \"Unknown\" \"hp no_device_found\"\n");
#elsefprintf(stdout, "direct hp \"Unknown\" \"HP Printer (HPLIP)\"\n");
#endifgoto bugout;}elsefprintf(stdout, "%s", buf);r = EXIT_SUCCESS;bugout:return r;
}static int open_device(const char* device_uri)
{//int io_mode = 0;HPMUD_DEVICE device_id = -1;int result_code = 0, r = EXIT_FAILURE;enum HPMUD_IO_MODE io_mode = HPMUD_RAW_MODE;debug("I/O mode=%d\n", io_mode);// 打开设备获得result_code = hpmud_open_device(device_uri, io_mode, &device_id);if (result_code != HPMUD_R_OK){fprintf(stderr, "error opening device (code=%d)\n", result_code);goto bugout;}hd = device_id; //TODO:delect.r = EXIT_SUCCESS;bugout:return r;
}/* Map printer status to IPP printer-state-reasons (see RFC-2911). */
static int map_ipp_printer_state_reason(int status, const char **state_msg)
{if (status >= 1000 && status <= 1999){/* inkjet vstatus */switch (status){case VSTATUS_IDLE:case VSTATUS_PRNT:*state_msg = "none";break;case VSTATUS_OOPA:*state_msg = "media-empty-error";break;case(VSTATUS_PAJM):*state_msg = "media-jam-error";break;default:*state_msg = "other";break;}}else if (status >= 10000 && status <= 55999){/* laserjet pjl status */if (status >= 10000 && status <= 10999)*state_msg = "none";else if (status >= 41000 && status <= 41999)*state_msg = "media-empty-error";else if ((status >= 42000 && status <= 42999) || (status >= 44000 && status <= 44999) || (status == 40022))*state_msg = "media-jam-error";else if (status == 40021)*state_msg = "cover-open-error";else if (status == 40600)*state_msg = "toner-empty-error";else*state_msg = "other"; /* 40017 - cartridge E-LABEL is unreadable (ie: ljp1005) */}else{/* Assume hpmud error */*state_msg = "other";}return 0;
}/** get_printer_status** inputs:* dd - device descriptor* pa - see pjl_attributes definition** outputs:* return - printer status, 1000 to 1999 = inkjet vstatus, 5000 to 5999 = hpmud error, 10000 to 55999 = pjl status code**/
static int get_printer_status(HPMUD_DEVICE dd, HPMUD_CHANNEL cd, struct pjl_attributes *pa)
{char id[1024];char *pSf;int status, ver, len;enum HPMUD_RESULT r;if (pa->pjl_device){pthread_mutex_lock(&pa->mutex);status = pa->current_status;pthread_mutex_unlock(&pa->mutex);}else{status = VSTATUS_IDLE; /* set default */r = hpmud_get_device_id(dd, id, sizeof(id), &len);
// if (!(r == HPMUD_R_OK || r == HPMUD_R_DEVICE_BUSY))if (r != HPMUD_R_OK){status = 5000+r; /* no deviceid, return some error */goto bugout;}/* Check for valid S-field in device id string. */if ((pSf = strstr(id, ";S:")) == NULL){/* No S-field, use status register instead of device id. */unsigned int bit_status;r = hpmud_get_device_status(dd, &bit_status);
// if (!(r == HPMUD_R_OK || r == HPMUD_R_DEVICE_BUSY))if (r != HPMUD_R_OK){status = 5000+r; /* no 8-bit status, return some error */goto bugout;}if (DEVICE_IS_OOP(bit_status))status = VSTATUS_OOPA;else if (DEVICE_PAPER_JAMMED(bit_status))status = VSTATUS_PAJM;else if (DEVICE_IO_TRAP(bit_status))status = VSTATUS_CARS;}else{/* Valid S-field, get version number. */pSf+=3;ver = 0;HEX2INT(*pSf, ver);pSf++;ver = ver << 4;HEX2INT(*pSf, ver);pSf++;/* Position pointer to printer state subfield. */switch (ver){case 0:case 1:case 2:pSf+=12;break;case 3:pSf+=14;break;case 4:pSf+=18;break;default:BUG("WARNING: unknown S-field version=%d\n", ver);pSf+=12;break;}/* Extract VStatus.*/status = 0;HEX2INT(*pSf, status);pSf++;status = status << 4;HEX2INT(*pSf, status);status += 1000;}}bugout:return status;
}/* Check printer status, if a valid error state, loop until error condition is cleared. */
static int loop_test(HPMUD_DEVICE dd, HPMUD_CHANNEL cd, struct pjl_attributes *pa,const char *dev, const char *printer, const char *username, const char *jobid, const char *title)
{int status, stat;const char *pstate, *old_state=NULL;while (1){status = get_printer_status(dd, cd, pa);map_ipp_printer_state_reason(status, &pstate);/* Check for user intervention errors. */if (strstr(pstate, "error")){if (pstate != old_state){if (old_state){/* Clear old error. */
// device_event(dev, printer, status, username, jobid, title);fprintf(stderr, "STATE: -%s\n", old_state);}/* Display error. *///device_event(dev, printer, status, username, jobid, title);fprintf(stderr, "STATE: +%s\n", pstate);old_state = pstate;}BUG("ERROR: %d %s; will retry in %d seconds...\n", status, pstate, RETRY_TIMEOUT);sleep(RETRY_TIMEOUT);continue;}/* Clear any old state. */if (old_state)fprintf(stderr, "STATE: -%s\n", old_state);/* Check for system errors. */if (status >= 5000 && status <= 5999){/* Display error. *///device_event(dev, printer, status, username, jobid, title);BUG("ERROR: %d device communication error!\n", status);stat = 1;}elsestat = 0;break; /* done */}return stat;
}int get_device_id(HPMUD_DEVICE hd)
{char id[1024] = {0};char *pSf;int status, ver, len;enum HPMUD_RESULT r;int ret = EXIT_FAILURE;r = hpmud_get_device_id(hd, id,sizeof(id), &len);printf("device_id:%s\n", id);if (r != HPMUD_R_OK){/* no deviceid, return some error */goto bugout;}/* Check for valid S-field in device id string. */if ((pSf = strstr(id, ";S:")) == NULL){/* No S-field, use status register instead of device id. */unsigned int bit_status;r = hpmud_get_device_status(hd, &bit_status);
// if (!(r == HPMUD_R_OK || r == HPMUD_R_DEVICE_BUSY))if (r != HPMUD_R_OK){status = 5000+r; /* no 8-bit status, return some error */goto bugout;}// if (DEVICE_IS_OOP(bit_status))
// status = VSTATUS_OOPA;
// else if (DEVICE_PAPER_JAMMED(bit_status))
// status = VSTATUS_PAJM;
// else if (DEVICE_IO_TRAP(bit_status))
// status = VSTATUS_CARS;}else{/* Valid S-field, get version number. */pSf+=3;ver = 0;HEX2INT(*pSf, ver);pSf++;ver = ver << 4;HEX2INT(*pSf, ver);pSf++;/* Position pointer to printer state subfield. */switch (ver){case 0:case 1:case 2:pSf+=12;break;case 3:pSf+=14;break;case 4:pSf+=18;break;default:printf("WARNING: unknown S-field version=%d\n", ver);pSf+=12;break;}/* Extract VStatus.*/status = 0;HEX2INT(*pSf, status);pSf++;status = status << 4;HEX2INT(*pSf, status);status += 1000;}printf("status:%d\n", status);ret = EXIT_SUCCESS;
bugout:return ret;
}static int get_printer_status_code(const char* device_id)
{const char* id = device_id;char *pSf;int ver;int status = 0;/* Check for valid S-field in device id string. */if ((pSf = strstr(id, ";S:")) == NULL){/* No S-field, use status register instead of device id. *//* do nothing */goto bugout;}else{/* Valid S-field, get version number. */pSf+=3;ver = 0;HEX2INT(*pSf, ver);pSf++;ver = ver << 4;HEX2INT(*pSf, ver);pSf++;/* Position pointer to printer state subfield. */switch (ver){case 0:case 1:case 2:pSf+=12;break;case 3:pSf+=14;break;case 4:pSf+=18;break;default:printf("WARNING: unknown S-field version=%d\n", ver);pSf+=12;break;}/* Extract VStatus.*/status = 0;HEX2INT(*pSf, status);pSf++;status = status << 4;HEX2INT(*pSf, status);status += 1000;}printf("status:%d\n", status);bugout:return status;
}static int get_cups_uri(char* cups_uri)
{char buf[HPMUD_LINE_SIZE*64];int cnt=0, bytes_read, r=EXIT_FAILURE;enum HPMUD_RESULT stat;stat = hpmud_probe_devices(HPMUD_BUS_ALL, buf, sizeof(buf), &cnt, &bytes_read);if (stat != HPMUD_R_OK)goto bugout;if (cnt == 0)fprintf(stdout, "direct hp \"Unknown\" \"HP Printer (HPLIP)\"\n");elsesprintf(cups_uri, buf, strlen(buf));r = EXIT_SUCCESS;bugout:return r;
}static int make_device_uri(char* dev_uri)
{int ret = EXIT_FAILURE;enum HPMUD_RESULT stat;char cups_uri[HPMUD_LINE_SIZE*64];char* p = NULL;stat = get_cups_uri(cups_uri);if (stat != EXIT_SUCCESS)goto bugout;p = strtok(cups_uri, " ");if(p == NULL)goto bugout;p = strtok(NULL, " ");if(p == NULL)goto bugout;// copy only one device uri and others ignore.sprintf(dev_uri, p, strlen(p));debug("dev_uri:%s\n", dev_uri);ret = EXIT_SUCCESS;
bugout:return ret;
}int main(void)
{int ret = EXIT_FAILURE;//const char *device_uri = "hp:/usb/Deskjet_1010_series?serial=CN39I18M1805S8";//const char *device_uri = "hp:/usb/Deskjet_1000_J110_series?serial=CN2C818N3605YD";char dev_uri[HPMUD_LINE_SIZE] = {0};// step 1.if(device_discovery() != EXIT_SUCCESS){debug("device discovery failed!\n");goto bugout;}printf("device discovery success!\n");// step 2:解析一个device uri.if(make_device_uri(dev_uri) != EXIT_SUCCESS){debug("make device uri failed!\n");goto bugout;}// step 3:open hp deviceif(open_device(dev_uri) != EXIT_SUCCESS){debug("open_device device failed!\n");goto bugout;}// step 4: get device id.get_device_id(hd);//printData();//readAttributeFromXml_EWS//StatusType10();char* reply = (char*)MALLOC(char, 500*1024);//获取状态XMLgetEWSUrl_LEDM("/DevMgmt/ProductStatusDyn.xml", reply); // 获取状态//getEWSUrl_LEDM("/DevMgmt/ConsumableConfigDyn.xml", reply); // 获取耗材配置free(reply);reply = NULL;if (hd >= 0)hpmud_close_device(hd);ret = EXIT_SUCCESS;bugout:return ret;
}打印机异常状态:
| N | Windows状态 | 宏 |
| 0 | 正常 | STATUS_PRINTER_IDLE(1000) |
| 1 | 无法与打印机通信 | x |
| 2 | 出纸盒已关闭 | STATUS_PRINTER_OUTPUT_TRAY_CLOSED(1035) |
| 3 | 门己打开 | STATUS_PRINTER_PEN_CHANGE(1008) |
| 4 | 缺纸 | STATUS_PRINTER_OUT_OF_PAPER(1009) |
| 5 | 卡纸 | STATUS_PRINTER_PAPER_STALL(1016) |
| 6 | 墨盒故障-黑色 | STATUS_PRINTER_PEN_FAILURE(1017) |
| 7 | 墨盒故障-三色 | - |
| 8 | 墨盒故障-黑色-三色 | - |
| 9 | 墨盒丢失 | - |
| 10 | 单墨盒模式-缺黑色 | STATUS_PRINTER_IDLE(1000) |
| 11 | 单墨盒模式-缺彩色 | STATUS_PRINTER_IDLE(1000) |
| 12 | 无墨 黑色 | x |
| 13 | 无墨 彩色 | x |
| 14 | 无墨 黑色-彩色 | x |
| 15 | 已经安装HP保护墨盒 | x |
| 16 | 检测到使用过的或仿制墨盒 | x |
|
| ... |
|
| 注:x代表暂无条件获取, -代表和上条相同。 如果出现6号状态,建议提示提示语“墨盒故障或墨盒丢失”。 | ||