文章目录
- 前言
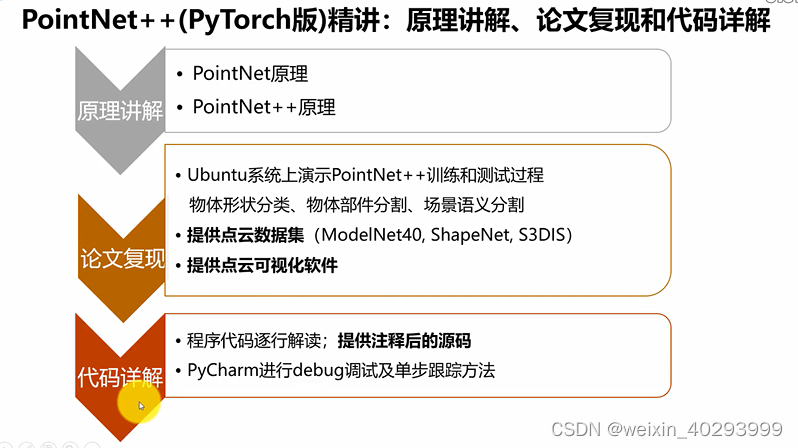
- 1 PointNet
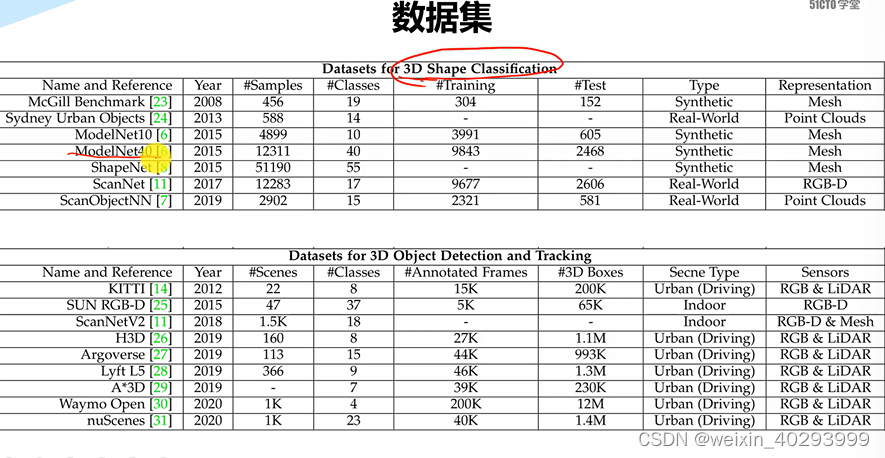
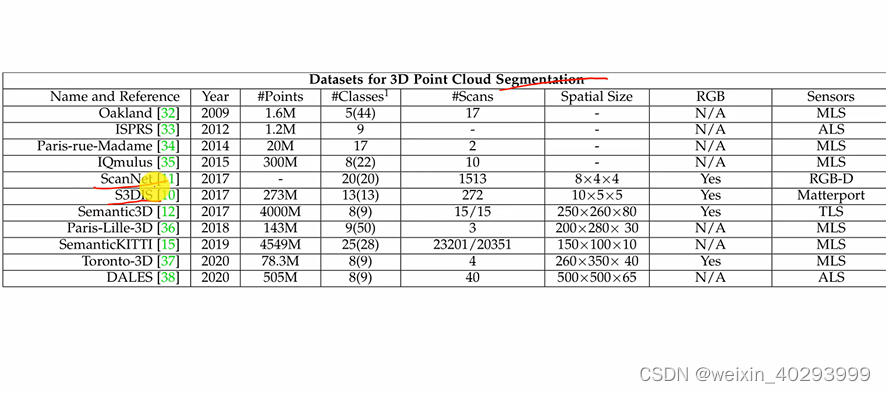
- 1.1 点云的数据集
- 1.2 点云的挑战
- 1.1 网络结构
前言
直接处理点云数据的深度学习技术PointNet
End To end Learning for scattered, unordered point data
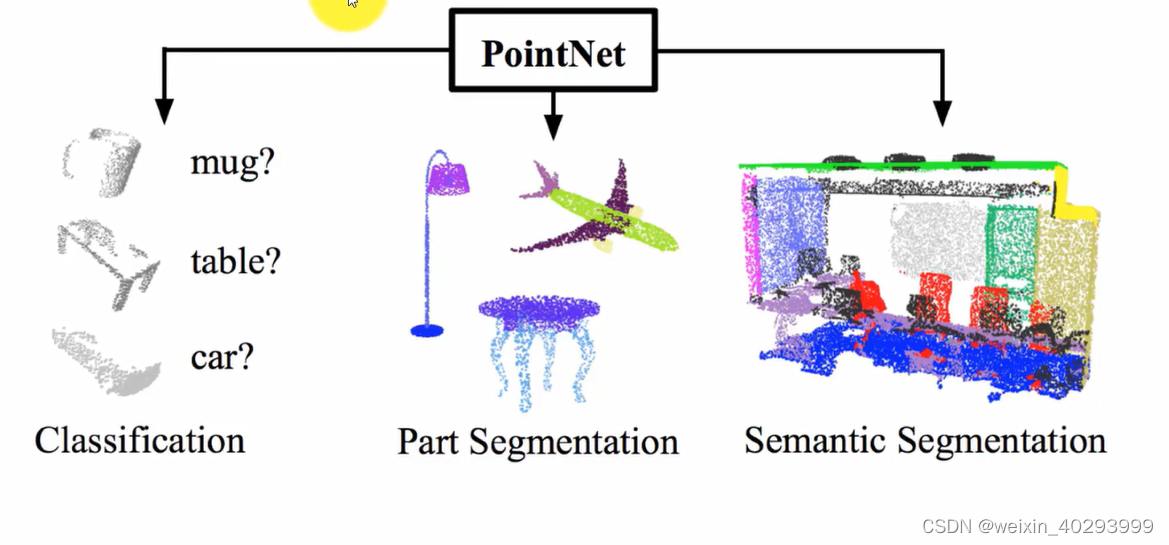
Unified franework for various tasks
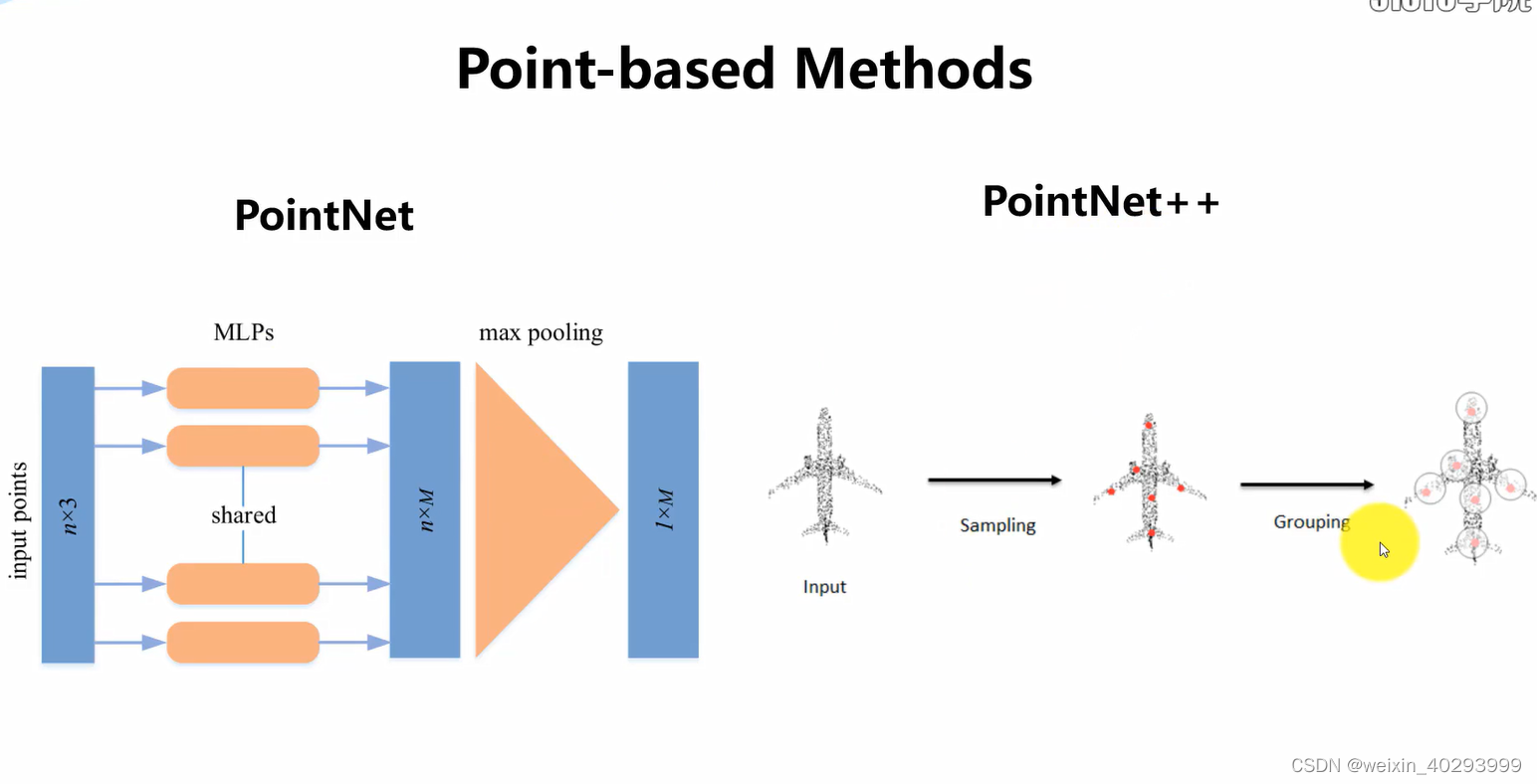
Point-Based Methods 分为 PointNet 和 PointNet++
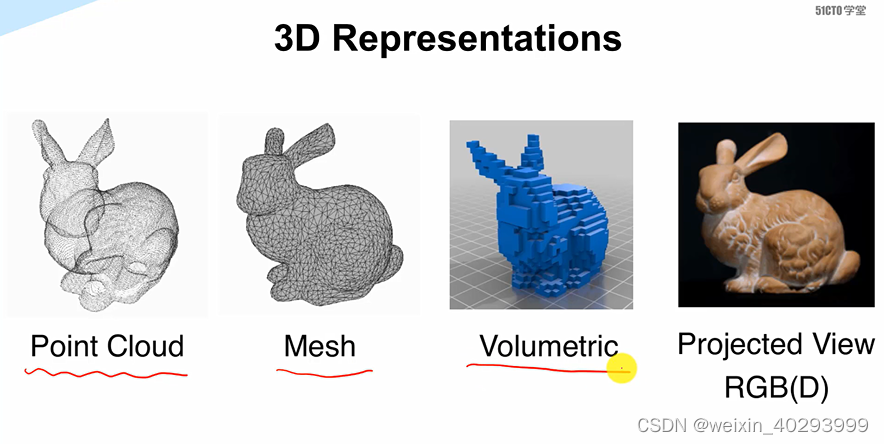
3D Representations 3D 表征数据
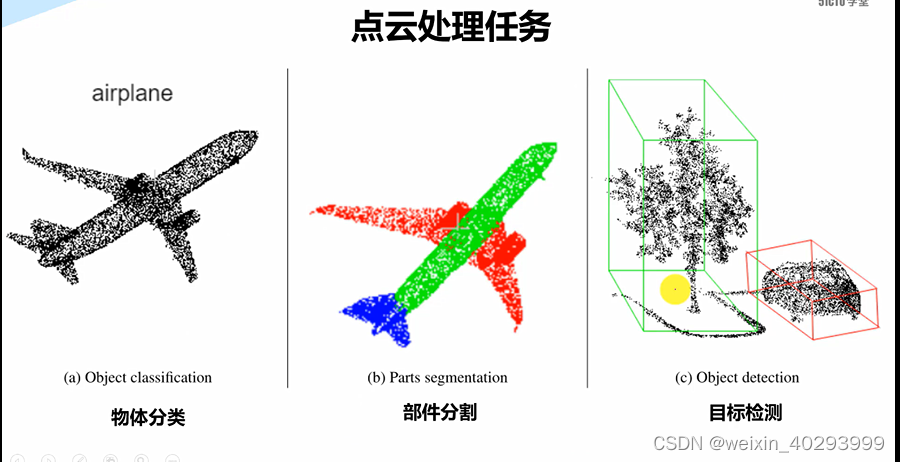
点云的任务: 1) 分类, 2)部件分割 3)目标检测(用三维的框,bounding box) 4)场景语义分割

激光雷达扫描获取的多.
点云最重要的是它的x,z,y的坐标.
1 PointNet
1.1 点云的数据集
1.2 点云的挑战
激光雷达获取的点:进密远疏
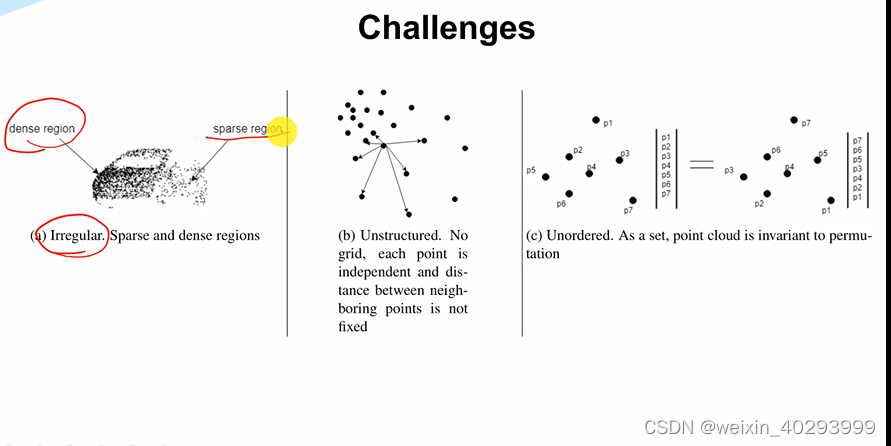
置换不变性:

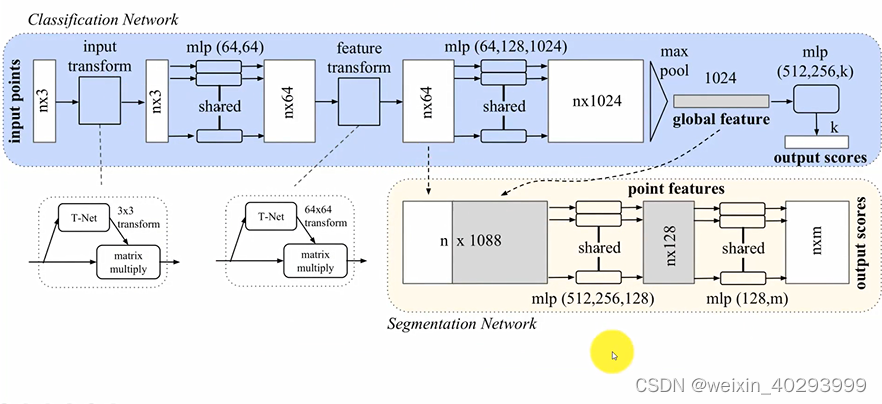
1.1 网络结构
PointNet结构:
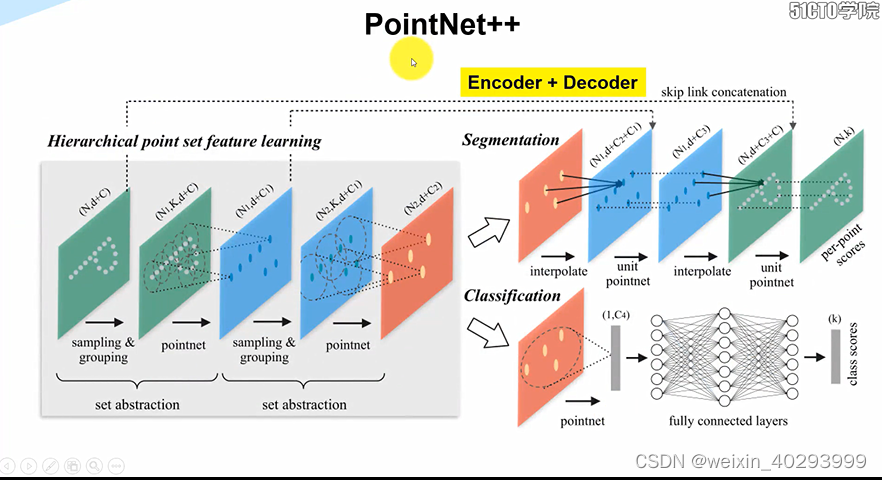
PointNet++ 结构:可以完成分类和分割
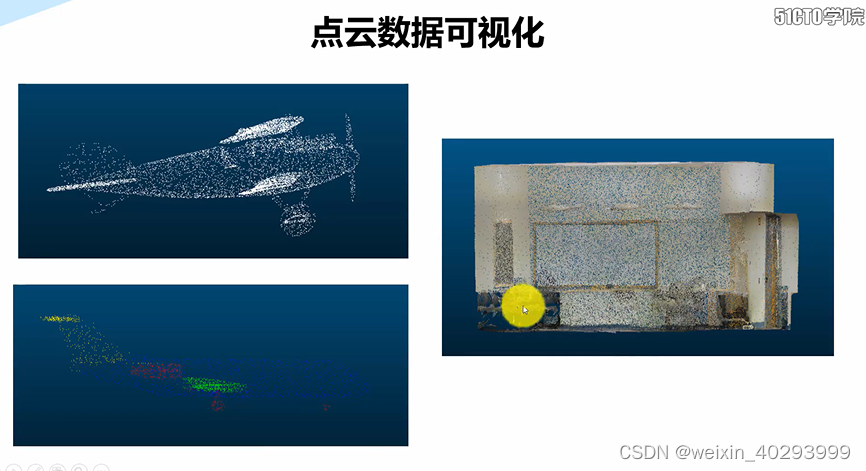
点云数据可视化