STM32HAL库驱动MPU6050
STM32CubeMX配置
System Core->RCC->HSE->Crystal/Ceramic Resonator
System Core->SYS->Debug->Serial Wire
Connectivity->I2C1->I2C->I2C
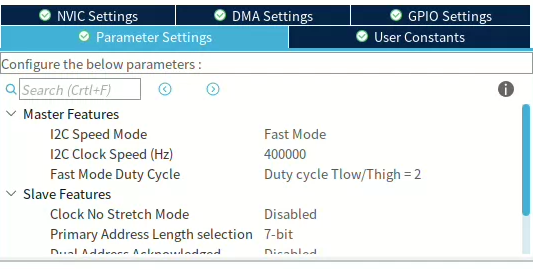
这里使用PB6/PB7分别作为IIC1的SCL时钟线/SDA数据线,可以分别设置Label SCL和SDA
Connectivity->USB->Device(FS)
Middleware->USB_DEVICE->Class For FS IP->Communic ation Device Class (Virtual Port Com)
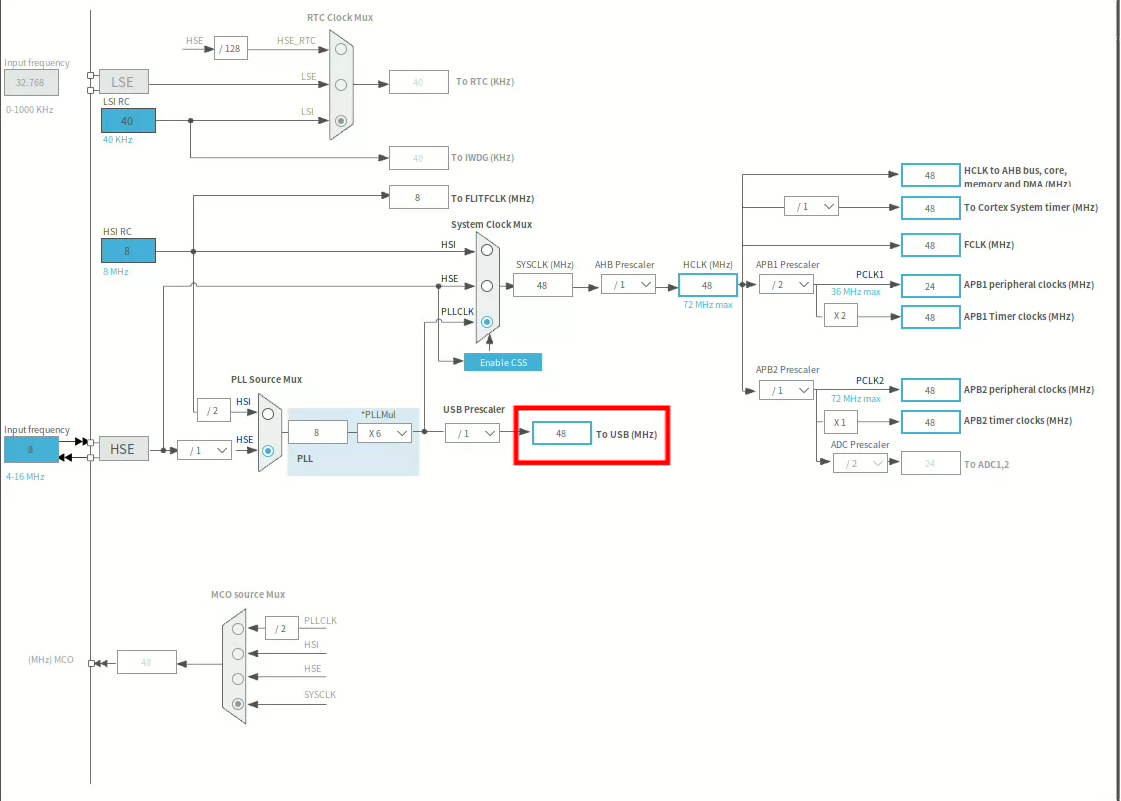
Clock Configuration->To USB 48MHz
GENERATE CODE
CLion移植
本次编译器使用CLion,若为Keil5/STM32CubeIDE等同理
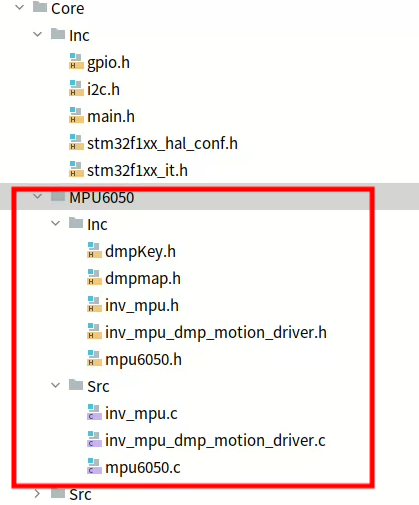
下载文件移植MPU6050的文件夹
Inc-dmpKey.h-dmpmap.h-inv_mpu.h-inv_mpu_dmp_motion_driver.h-mpu6050.h
Src-inv_mpu.c-inv_mpu_dmp_motion_driver.c-mpu6050.c
然后重新加载CMake项目
修改主要将i2c.c的宏定义 hi2c1更改到mpu6050.c;
//-----i2c.c--------
I2C_HandleTypeDef hi2c1;
//-----mpu6050.c----
uint8_t MPU_Init(void)
{ uint8_t res;extern I2C_HandleTypeDef hi2c1;HAL_I2C_Init(&hi2c1);MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); MPU_Set_Gyro_Fsr(3); MPU_Set_Accel_Fsr(0); MPU_Set_Rate(50); MPU_Write_Byte(MPU_INT_EN_REG,0X00); MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); res=MPU_Read_Byte(MPU_DEVICE_ID_REG);if(res==MPU_ADDR){MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); MPU_Set_Rate(50); }else return 1;return 0;
}
编译如果没有找到有关mpu6050的文件,则修改CMakeLists.txt中包含MPU6050的头文件

main.c
int main(void)
{/* USER CODE BEGIN 1 */float pitch,roll,yaw; //欧拉角short aacx,aacy,aacz; //加速度传感器原始数据short gyrox,gyroy,gyroz; //陀螺仪原始数据float temp; //温度HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_I2C1_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 */MPU_Init();mpu_dmp_init();while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_Delay(500);while (mpu_dmp_get_data(&pitch, &roll, &yaw)); //必须要用while等待,才能读取成功MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据temp = MPU_Get_Temperature(); //得到温度信息usb_printf("roll:%.2f pitch:%.2f yaw:%.2f\r\n", roll, pitch, yaw);//串口1输出采集信息}/* USER CODE END 3 */
}
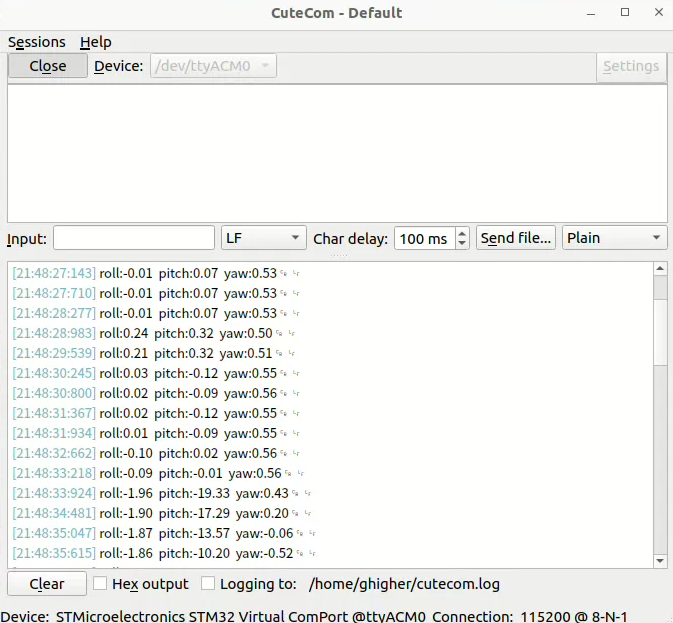
串口显示
由于本次软件环境为Ubuntu下,所以使用串口软件CuteCom
Windows下可以使用XCOM
下载CuteCom
sudo apt-get install cutecom
输入命令打开
cutecom
查看串口
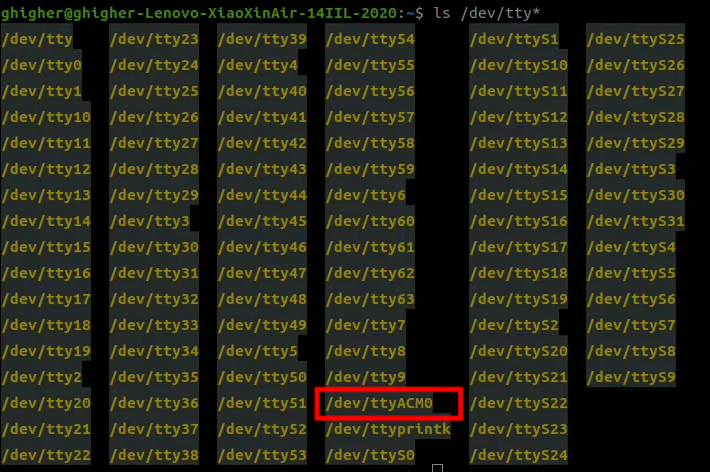
ls /dev/tty*
找到串口号,这里虚拟串口为/dev/ttyACM0
添加权限
sudo chmod 777 /dev/ttyACM0
CuteCom显示MPU6050消息,翻滚角/俯仰角/偏航角