直接法是根据像素的亮度信息(Intensity)来估计相机的运动。
还记得估计相机的运动有以下方法:
1.提取特征点和描述子,比如SIFT,FAST特征点,不同视角的图片特征点匹配,然后用对极几何,PnP或ICP法估计相机运动。
2. 提取特征点,不提取描述子,然后用光流法跟踪特征点的运动,再估计相机运动。
而直接法可以在特征点的基础上计算,也可以连特征点都不提取了,直接随机采点。
也不用计算光流,不需要知道点和点之间的对应关系,而是通过最小化光度误差来得到,是一个优化问题。
直接法相比于特征点,克服了以下缺点,
1.提取特征点和描述子的计算很耗时。
2.使用特征点时,容易忽略特征点以外的信息。
3.没有明显纹理的地方,特征点有缺失。
4.光流法仍然需要特征点。
根据像素的使用数量,直接法有稀疏,稠密和半稠密3种。
直接法仍然基于灰度不变假设。
在光流法中,首先追踪特征点的位置,然后估计相机运动,是一个两步走的方案。
直接法是直接估计相机运动,通过优化相机位姿,寻找与点p1更相似的点p2,最小化目标是两个像素的亮度误差。
优化的步骤回忆一下高斯牛顿法,
首先把误差 e e e对相机运动 T T T求导,得到雅可比矩阵 J J J,
然后hessian矩阵H = JJT, b = -Je(e为误差),
再根据 H Δ x = b H\Delta x = b HΔx=b求出更新量 Δ x \Delta x Δx,
迭代,用 Δ x \Delta x Δx更新 T T T,直到收敛。
上面的优化思路再具体一点:
首先,误差 e = I 1 ( p 1 ) − I 2 ( p 2 ) e = I_{1}(p_{1}) - I_{2}(p_{2}) e=I1(p1)−I2(p2), I I I是Intensity,
终极目标是找到相机的运动 T T T,使 ∥ e ∥ 2 \left\| e\right\|^{2} ∥e∥2最小。
假设一个点P在img1中的坐标为p1,在img2中的像素坐标为u
那么,
e ( T ) = I 1 ( p 1 ) − I 2 ( u ) e(T) = I_{1}(p_{1}) - I_{2}(u) e(T)=I1(p1)−I2(u)
而这个 u u u是根据相机内外参做如下转换而来的,
q = T P q = TP q=TP, u = 1 Z 2 K q u = \frac{1}{Z_{2}}Kq u=Z21Kq
这个转换不重要,只需要知道q是T的函数,u是q的函数即可,因为后面用到导数的链式法则。
那么就开始用误差 e e e对相机的运动 T T T求导了,引入了李代数的左扰动模型,利用泰勒一阶展开:
∂ e ∂ T = ∂ I 2 ∂ u ⋅ ∂ u ∂ q ⋅ ∂ q ∂ ξ \frac{\partial e}{\partial T} = \frac{\partial I_{2}}{\partial u}\cdot \frac{\partial u}{\partial q}\cdot \frac{\partial q}{\partial \xi} ∂T∂e=∂u∂I2⋅∂q∂u⋅∂ξ∂q
其中 ∂ I 2 ∂ u \frac{\partial I_{2}}{\partial u} ∂u∂I2是u处的像素梯度, 这里的u是坐标(u, v)。
而我们知道像素坐标(u,v) 和空间坐标(X, Y, Z)的关系(参考链接)
u = f x X Z + c x u = f_{x}\frac{X}{Z} + c_{x} u=fxZX+cx, v = f y Y Z + c y v = f_{y}\frac{Y}{Z} + c_{y} v=fyZY+cy
所以
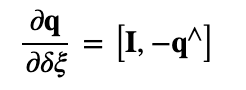
这是李代数的知识,这一步不用在意。
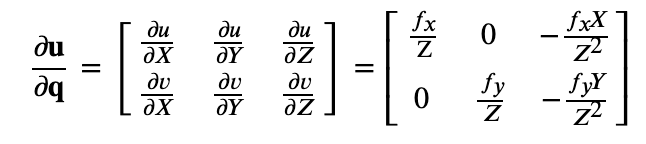
实际中,后两项只和q有关,与图像无关,合并到一起,得到。

这个矩阵看着很吓人,实际用的时候,相机内参(fx, fy, cx, cy)已知,空间点坐标(X, Y, Z)已知的话,直接套公式可得。
不要忘了目标,我们的目标是求雅可比矩阵 J J J,
而 J = − ∂ I 2 ∂ u ⋅ ∂ u ∂ δ ξ J = - \frac{\partial I_{2}}{\partial u}\cdot\frac{\partial u}{\partial \delta \xi} J=−∂u∂I2⋅∂δξ∂u
其实就是 1x2的像素梯度 与 一个2x6的矩阵 相乘。
有了J就好办了,求H,b,解出更新量 Δ x \Delta x Δx,不断更新相机运动 T T T直到收敛。
以上优化步骤体现在下面代码里
cv::Mat left_img = cv::imread(left_file, 0); //读入图片
//随机采2000个点(X,Y,Z)
for(int i = 0; i < nPoints; i++) {int x = rng.uniform(boarder, left_img.cols - boarder); //靠近边界的点不选int y = rng.uniform(boarder, left_img.rows - boarder);int disparity = disparity_img.at<uchar>(y, x); //是d,不是直接的深度哦double depth = fx * baseline / disparity; //这个才是深度depth_ref.push_back(depth);pixels_ref.push_back(Eigen::Vector2d(x, y));
}
Sophus::SE3d T_cur_ref; //李群,旋转平移变换矩阵T
//直接法估计T
DirectPoseEstimationSingleLayer(left_img, img, pixels_ref, depth_ref, T_cur_ref);
来看下具体怎么估计T
void DirectPoseEstimationSingleLayer(const cv::Mat &img1,const cv::Mat &img2,const VecVector2d &px_ref,const vector<double> depth_ref,Sophus::SE3d &T21) {//迭代直到收敛 for(int iter = 0; iter < iterations; iter++) {jaco_accu.reset();//accumulate_jacobian在后面定义cv::parallel_for_(cv::Range(0, px_ref.size()),std::bind(&JacobianAccumulator::accumulate_jacobian, &jaco_accu, placeholders::_1));Matrix6d H = jaco_accu.hessian();Vector6d b = jaco_accu.bias();// solve update and put it into estimationVector6d update = H.ldlt().solve(b);T21 = Sophus::SE3d::exp(update) * T21; //exp:李代数到李群,se3:旋转平移变换T(R,t), *:T1*T2仍属于SE(3),乘法封闭性质cost = jaco_accu.cost_func();}
可以看到,上面的update就是我们要求的 Δ x \Delta x Δx, Δ x = H − 1 ⋅ b \Delta x = H^{-1}\cdot b Δx=H−1⋅b
update求出来是李代数,而T是李群,用se3.exp(update)把update转到李群。由于李群是乘法封闭性质,se3.exp(update)并不是加到T上,而是用se3.exp(update) * T
parallel_for_并行计算J,H和b,具体如下
//并行计算这么多点for(size_t i = range.start; i < range.end; i++) {// compute the projection in the second image//像素坐标转相机坐标:u=fx(X/Z) + cx => X = Z * ((u - cx)/fx)Eigen::Vector3d point_ref =depth_ref[i] * Eigen::Vector3d((px_ref[i][0] - cx) / fx, (px_ref[i][1] - cy) / fy, 1);Eigen::Vector3d point_cur = T21 * point_ref; //T21:上面算出来的旋转平移变换矩阵,得到相机位姿变化后点的相机坐标if(point_cur[2] < 0) continue; //深度无效//相机坐标到像素坐标:u=fx(X/Z) + cxfloat u = fx * point_cur[0] / point_cur[2] + cx;float v = fy * point_cur[1] / point_cur[2] + cy;if(u < half_patch_size || u > img2.cols - half_patch_size || v < half_patch_size ||v > img2.rows - half_patch_size) continue; //无效点projection[i] = Eigen::Vector2d(u, v); //像素坐标double X = point_cur[0], Y = point_cur[1], Z = point_cur[2]; //相机坐标double Z2 = Z * Z, Z_inv = 1.0 / Z, Z2_inv = Z_inv * Z_inv; //提前计算cnt_good ++; //有效点个数//单个点找对应点误差大,用一片patchfor(int x = -half_patch_size; x <= half_patch_size; x++) {for(int y = -half_patch_size; y <= half_patch_size; y++) {//img1的像素和img2对应像素的一片patch内的intensity误差double error = GetPixelValue(img1, px_ref[i][0] + x, px_ref[i][1] + y) -GetPixelValue(img2, u + x, v + y);Matrix26d J_pixel_xi; //变换后的三维点对变换T的左扰动的导数,2x6矩阵Eigen::Vector2d J_img_pixel; //图像对像素点的导数//套公式J_pixel_xi(0, 0) = fx * Z_inv;J_pixel_xi(0, 1) = 0;J_pixel_xi(0, 2) = -fx * X * Z2_inv;J_pixel_xi(0, 3) = -fx * X * Y * Z2_inv;J_pixel_xi(0, 4) = fx + fx * X * X * Z2_inv;J_pixel_xi(0, 5) = -fx * Y * Z_inv;J_pixel_xi(1, 0) = 0;J_pixel_xi(1, 1) = fy * Z_inv;J_pixel_xi(1, 2) = -fy * Y * Z2_inv;J_pixel_xi(1, 3) = -fy - fy * Y * Y * Z2_inv;;J_pixel_xi(1, 4) = fy * X * Y * Z2_inv;J_pixel_xi(1, 5) = fy * X * Z_inv;//图像对像素的导数为(u, v)处的像素梯度J_img_pixel = Eigen::Vector2d(0.5 * (GetPixelValue(img2, u+1+x, v+y) - GetPixelValue(img2, u-1+x, v+y)),0.5 * (GetPixelValue(img2, u+x, v+1+y) - GetPixelValue(img2, u+x, v-1+y)));//根据导数的链式法则, (1x2) x (2x6) = (1x6) -> (6x1)Vector6d J = -1.0 * (J_img_pixel.transpose() * J_pixel_xi).transpose();//高斯牛顿hessian += J * J.transpose();bias += -error * J;cost_tmp += error * error;}}//一块patch求完if(cnt_good) {unique_lock<mutex> lck(hessian_mutex); //多线程锁,在block结束时自动释放H += hessian;b += bias;cost += cost_tmp / cnt_good;}}
上面就是优化相机运动 T T T的步骤,
再来说下图像金字塔直接法,它是coarse to fine的思想,金字塔从下到上对图像进行缩放。
需要注意的是图像缩放的同时,相机内参和点的坐标也要一起缩放。
计算时从上层计算,每层的结果传入下面一层作为参考值,见代码
//create pyramidsvector<cv::Mat> pyr1, pyr2;//装入图像金字塔for(int i = 0; i < pyramids; i++) {if(i == 0) {pyr1.push_back(img1);pyr2.push_back(img2);} else {cv::Mat img1_pyr, img2_pyr;cv::resize(pyr1[i-1], img1_pyr,cv::Size(pyr1[i-1].cols * pyramid_scale, pyr1[i-1].rows * pyramid_scale));cv::resize(pyr2[i-1], img2_pyr,cv::Size(pyr2[i-1].cols * pyramid_scale, pyr2[i-1].rows * pyramid_scale));pyr1.push_back(img1_pyr);pyr2.push_back(img2_pyr);}}double fxG = fx, fyG = fy, cxG = cx, cyG = cy; //相机内参也要随着金字塔一起缩放,先backup原值for(int level = pyramids - 1; level >= 0; level --) { //金字塔从顶层到底层处理VecVector2d px_ref_pyr; //当前层的keypointsfor(auto &px : px_ref) {px_ref_pyr.push_back((scales[level] * px)); //特征点的坐标也要缩放}//缩放的相机内参fx = fxG * scales[level];fy = fyG * scales[level];cx = cxG * scales[level];cy = cyG * scales[level];//px_ref_pyr, T21是引用形参,下一层会基于上一层的结果进行计算DirectPoseEstimationSingleLayer(pyr1[level], pyr2[level], px_ref_pyr, depth_ref, T21);}
看下效果吧,
单层直接法
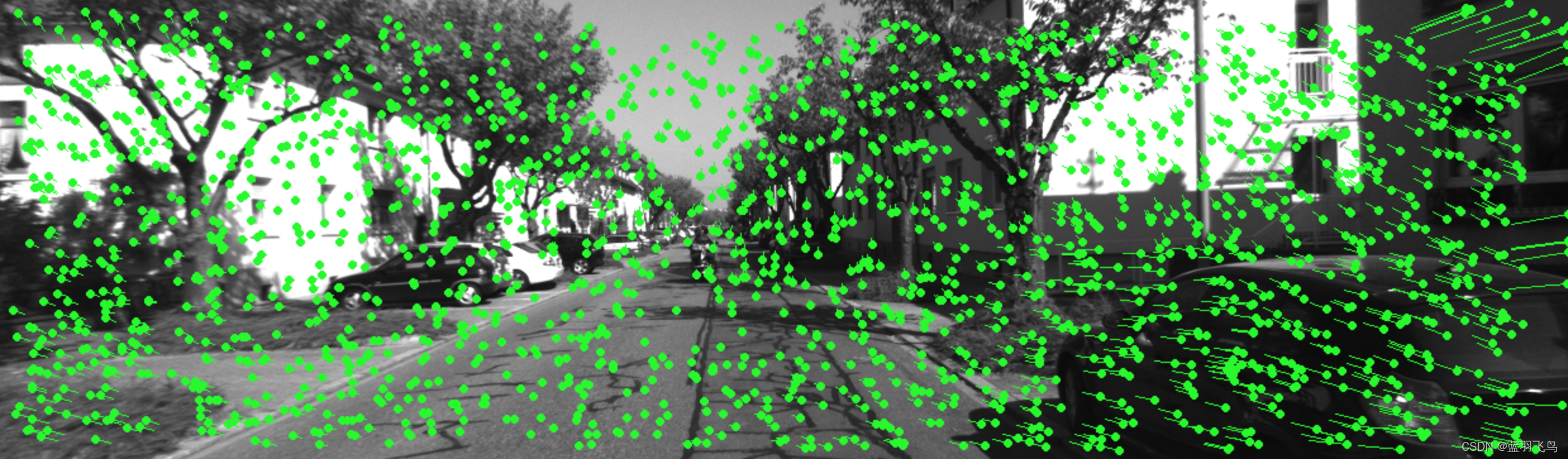
多层直接法

完整代码参照链接
由于直接法是基于灰度不变的假设,所以仍然面临光照变化容忍度差的缺点。