Cloud
- 一、前言
- 二、电源管理
- 2.1 锂电池
- 2.2 充放电路
- 2.3 稳压电路(5V->3.3V)
- 三 、启动方式boot
- 3.1 概述
- 3.2 电路图
- 四、USB_HUB电路
- 4.1 概述
- 4.2 硬件电路
- 五、mpu6050设计及应用
- 5.1 概述
- 5.2 硬件电路
- 5.3 软件编写
- 六、ipslcd设计及应用
- 6.1 概述
- 6.2 硬件电路
- 6.3 软件编写
- 七、摄像头设计及应用
- 7.1 概述
- 7.2 硬件电路
- 7.3 软件编写
- 八、其他功能
- 8.1 无线WiFi应用
- 8.2 扩展接口
- 8.3 未安排的
- 九、结果展示
一、前言
由于上次的小熊板制作过程犯了很多错误,造成一些影响颜值的结果。对此想要重新设计制作相关的linux功能板,此版本依然采用imx6ull核心板,同时加入了mpu6050、光敏输入等功能模块。
坦白:大部分电路都是借鉴了原子开源电路。
总结主要功能:
一、核心功能
- 电源管理:锂电池、充放电路、稳压电路。
- boot的emmc/sd卡启动方式。
- USB_HUB(WIFI、键盘等)。
- 复位电路reset、开关机电路on_off。
二、扩展功能
- ipslcd屏幕:显示窗口。
- mpu6050:获取姿态。
- LED炫彩灯:花里胡哨。
- 光敏电阻:获取光强。
- 摄像头ov5640:获取图像信息。
- 扩展接口:留存I2C、PWM、UART等接口。
二、电源管理
2.1 锂电池
- 型号:102040(10mmx20mmx40mm)
- 电压:3.7V
- 容量:1200毫安

2.2 充放电路
使用英集芯ip5306电源芯片。是一款集成升压转换器、 锂电池充电管理、电池电量指示的多功能电源管理 SOC,为移动电源提供完整的电源解决方案。
- 输入电压:5V
- 输出电压:5V 2.4A(max)
- 充电目标电压/电流:4.2V 2.1A
电路图:

实物图:第一次想自己画,把功能电路和电源电路画在一起,但是忽略了电源线的宽度(<10mil)。后来意识到电源电路和功能电路还是要分开绘制,这样如果电源冒烟了,不会影响功能电路。如下图为某宝获得,真香!!,几块大洋,小巧方便。
(电源电路对于外行人还真不是一下就掌握的,器件布局和布线不规范可能导致发热或烧掉)。
网上说10mil线大概过1A电流,所有新版功能板的电源线宽度给到了20mil。

2.3 稳压电路(5V->3.3V)
使用XC6206P系列芯片XC6206P332MR,只能说该芯片YYDS,高精度、低功耗、低压差,3端CMOS降压型电压稳定器。 应用于电池供电的数码家电设备。
- 封装:SOT-23
- 最大输入电压:7V
最大输出电流:200mA- 低功耗:1.0uA
电路图:

三 、启动方式boot
3.1 概述

3.2 电路图
启动方式: 根据概述,只需要EMMC/SD卡启动之间切换。

外接SD卡: 注意,SD卡还有一个外壳,外壳需要接地。这是因为在插入SD卡后,电路中CD/SW引脚会连接到外壳上,通过读取该引脚电平为低电平判断是否插卡。

四、USB_HUB电路
4.1 概述
I.MX6ULL 有2个 USB 主控制器,每个主控制器可以外接USB_HUB扩展坞。
一个 USB 主控制器支持 128 个地址,地址 0 是默认地址(主机),所以一个 USB 主控制器最多可以
分配 127 个地址的设备(从机)。
USB 分为 HOST(主机)和从机(或 DEVICE), OTG是 On-The-Go 的缩写,支持USB OTG 功能的 USB 接口既可以做 HOST,也可以做 DEVICE。通过ID线切换主从状态。
USB OTG功能相关的引脚有5个:
- 引脚1 - VBUS,电压为5V
- 引脚2 - D-
- 引脚3 - D+
- 引脚4 -
ID 0:主机模式;1:从机模式 - 引脚5 - GND
4.2 硬件电路
原理图: 这里的OTG1_ID为0,表示也做主设备,可应用于无线WIFI、键盘、扩展坞等。

实物图:

五、mpu6050设计及应用
5.1 概述
5.1.1 mpu6050概述
参考博文:MPU6050模块
MPU6050内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计、可扩展的数字运动处理器DMP(Digital Motion Processor)和一个数字温度传感器。通过IIC接口输出一个6轴信号。
陀螺仪就是测角速度的,加速度传感器就是测角加速度的,二者数据通过算法就可以得到PITCH、YAW、ROLL角。
- 具有 131 LSBs/° /sec 敏感度与全格感测范围为±250、±500、±1000 与±2000° /sec的 3 轴角速度感测器(陀螺仪)
- 集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器
- 陀螺仪工作电流: 5mA,陀螺仪待机电流: 5uA; 加速器工作电流:500uA,加速器省电模式电流: 40uA@10Hz
- 高达 400Khz 的 IIC 通信接口
- ADC都是16位
姿态角示意图:绕向即为正方向,可根据右手螺旋定则确定方向。

内部结构示意图:内置了三轴加速度传感器、三轴陀螺仪和一个温度传感器。
- INT为中断输出脚
- TCS为片选脚
- AD0为设置地址脚
SCL和SDA为主IIC接口- AUX_CL和AUX_DA为从IIC接口

5.1.2 i2c概述
I2C 是很常见的一种总线协议, I2C 是 NXP 公司设计的, I2C 使用两条线在主控制器和从机之间进行数据通信。一条是 SCL(串行时钟线),另外一条是 SDA(串行数据线),这两条数据线需要接上拉电阻,一般是 4.7K,总线空闲的时候 SCL 和 SDA 处于高电平。 I2C 总线标准模式下速度可以达到 100Kb/S,快速模式下可以达到 400Kb/S。 一个 I2C 控制器下可以挂多个 I2C 从设备。
I2C 总线工作是按照一定的协议来运行的。
协议相关术语:
1、起始位
在 SCL 为高电平的时候, SDA 出现下降沿就表示为起始位。

2、停止位
在 SCL 位高电平的时候, SDA出现上升沿就表示为停止位。

3、数据传输
I2C 总线在数据传输的时候要保证在 SCL 高电平期间, SDA 上的数据稳定,因此 SDA 上的数据变化只能在 SCL 低电平期间发生。

4、应答信号ACK
应答信号是由从机发出的,主机需要提供应答信号所需的时钟,主机发送完 8 位数据以后紧跟着的一个时钟信号就是给应答信号使用的。从机通过将 SDA 拉低来表示发出应答信号,表示通信成功,否则表示通信失败。
5、 I2C 写时序(三步)
- 写信号:0

设备地址(写)->寄存器地址->写数据
6、 I2C 读时序(四步)
- 读信号:1

设备地址(写)->寄存器地址->设备地址(读)->读数据
规律:每次写设备地址/寄存器地址之前有起始位,每8bit数据从机有应答/非应答。
5.2 硬件电路
芯片引脚复用:

原理图: 注意,I2C要上拉电阻。

实物图:

5.3 软件编写
I2C设备驱动程序结构模型为:I2C设备(设备树描述)–I2C总线驱动(厂商提供)–>I2C设备驱动(自己编写)。
5.3.1 I2C总线驱动
这里就是 SOC 的 I2C 控制器驱动,一旦编写完成就不需要再做修改,其他的I2C设备直接调用提供的API函数完成读写操作即可,正好符合 Linux 的驱动分离与分层的思想。这部分相关驱动NXP厂商已经帮我们写好了,可直接调用,但还是大概了解一下吧。
I2C 控制器描述
描述为 i2c_adapter,定义在 include/linux/i2c.h 。
//厂商已写好
struct i2c_adapter {struct module *owner;unsigned int class; /* classes to allow probing for */const struct i2c_algorithm *algo; /* 总线访问算法 */void *algo_data;...
};
i2c_algorithm 就是 I2C 控制器与 IIC 设备进行通信的方法,对外提供读写 API 函数。
//厂商已写好
struct i2c_algorithm {......int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs, int num);int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,......
};
//master_xfer 就是 I2C 适配器的传输函数,可以通过此函数来完成与 IIC 设备之间的通信
//smbus_xfer 就是 SMBUS 总线的传输函数。
I2C 控制器注册/注销
//注册
int i2c_add_adapter(struct i2c_adapter *adapter)
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
//注销
void i2c_del_adapter(struct i2c_adapter * adap)
综上所述
I2C 总线驱动(I2C控制器驱动)的主要工作就是
初始化i2c_adapter 结构体变量,然后设置 i2c_algorithm 中的master_xfer 函数。- 通过 i2c_add_numbered_adapter/i2c_add_adapter函数
向系统注册设置好的 i2c_adapter。
更深一层
其实 I2C 总线驱动(I2C控制器驱动)内部也是是通过设备-总线-驱动这一结构模型完成的。示意图如下:
对I2C控制器:(控制器描述-platform总线驱动-控制器驱动)==>I2C总线驱动
对I2C设备:I2C设备–I2C总线驱动–>I2C设备驱动
也就是说我们写驱动程序时只针对I2C设备那一层,更深一层的驱动在i2c-imx.c文件写好,内部有关于I2C控制器相关寄存器操作以及对I2C协议相关术语描述,如i2c_imx_start、 i2c_imx_read、 i2c_imx_write 和 i2c_imx_stop 这些函数就是 I2C 寄存器的具体操作函数。
总线部分就是这些,就是对控制器驱动后又充当了外层设备的总线。
5.3.2 I2C设备
就是针对具体的 I2C 设备而编写的驱动,如本章的mpu6050驱动。
I2C总线驱动对设备的描述
I2C总线驱动提供i2c_client 结构体,在 include/linux/i2c.h 文件中。
一个设备对应一个 i2c_client,每检测到一个 I2C 设备就会给这个 I2C 设备分配一个i2c_client。
//厂商已写好
struct i2c_client {unsigned short flags; /* 标志 */unsigned short addr; /* 芯片地址, 7 位,存在低 7 位*/......char name[I2C_NAME_SIZE]; /* 名字 */struct i2c_adapter *adapter; /* 对应的 I2C 适配器 */struct device dev; /* 设备结构体 */int irq; /* 中断 */struct list_head detected;......
};
在I2C设备树上添加mpu6050设备的描述
个人理解:I2C总线驱动将设备树中的描述(i2c1、设备厂商、设备名称、设备地址)存到i2c_client结构体对象中,方便在设备驱动中调用。
//IO复用,电气属性主要设置:上拉输入,开漏输出。
pinctrl_i2c1: i2c1grp {fsl,pins = <MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0>;
};
...
//在I2C设备树上添加mpu6050设备的描述
&i2c1 {clock-frequency = <100000>; /*100k 400k可选*/pinctrl-names = "default";pinctrl-0 = <&pinctrl_i2c1>; /*pinctrl子系统*/status = "okay";mpu6050:mpu6050@68{compatible = "InvenSense,mpu6050";/*描述*/reg = <0x68>; /*mpu6050作为从机地址为:0x68*/status = "okay"; /*需要方便开关就写*/};};
启动系统可以在/sys/bus/i2c/devices 目录下看到mpu6050的设备地址。
5.3.3 I2C设备驱动
I2C总线驱动对设备驱动的API函数
1、I2C总线驱动提供i2c_driver 结构体,在 include/linux/i2c.h 文件中。
//厂商已写好
struct i2c_driver {...//当 I2C 设备和驱动匹配成功以后 probe 函数就会执行int (*probe)(struct i2c_client *, const struct i2c_device_id *);int (*remove)(struct i2c_client *);...//如果使用设备树的话,需要设置 device_driver 的of_match_table 成员变量,也就是驱动的兼容(compatible)属性。struct device_driver driver;const struct i2c_device_id *id_table;...
}
i2c_driver 注册/注销
//注册
int i2c_register_driver(struct module *owner,struct i2c_driver *driver)
//注销
void i2c_del_driver(struct i2c_driver *driver)
2、I2C总线驱动提供 i2c_transfer 函数,i2c_transfer 函数最终会调用 I2C 适配器中 i2c_algorithm 里面的 master_xfer 函数,对于 I.MX6U 而言就是
i2c_imx_xfer 这个函数。
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
//adap: 所使用的 I2C 适配器, i2c_client 会保存其对应的 i2c_adapter。
//msgs: I2C 要发送的一个或多个消息。
//num: 消息数量,也就是 msgs 的数量。
//返回值: 负值,失败,其他非负值,发送的 msgs 数量。
重点在于msgs 这个参数,内部主要存I2C读写操作中的设备地址、寄存器地址、读写标志、缓存数据等内容。
mpu6050设备驱动程序
参考博文:这是一个链接
- 初始化IIC接口:初始化与MPU6050连接的SDA和SCL数据线。
- 复位MPU6050:MPU的地址由D0引脚决定,D0接地了,则地址为0x68;若接VDD,则地址为0x69.
通过对电源管理寄存器1(0x6b)的bit7位写1实现对MPU6050复位。复位后默认值位0X40,设置该寄存器为0x00唤醒MPU6050. - 设置角速度传感器和加速度传感器的满量程范围:陀螺仪配置寄存器(0x1B)和加速度传感器配置寄存器(0x1C)。分别为+_2000dps、±2g.
- 设置其它参数:关中断,关AUX IIC接口,禁止FIFO,设置陀螺仪采样率和设置数字低通滤波器(DLPF).
分别通过中断使能寄存器(0X38)和用户控制寄存器(0X6A)控制;
通过 FIFO 使能寄存器(0X23)控制,默认都是 0(即禁止 FIFO);
采样率分频寄存器(0X19)控制:50.数字低通滤波器(DLPF)寄存器(0X1A)带宽的 1/2 。 - 配置系统时钟源并使能角速度传感器和加速度传感器
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include "mpu6050reg.h"
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : mpu6050.c
作者 : zxy
版本 : V1.0
描述 : mpu6050驱动程序
日志 : 初版V1.0 2022/2/16 zxy修改
***************************************************************/
#define MPU6050_CNT 1
#define MPU6050_NAME "mpu6050"struct mpu6050_dev {dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */struct device_node *nd; /* 设备节点 */int major; /* 主设备号 */void *private_data; /* 私有数据 *///接收的数据为2字节 但i2c的基本单位都是1字节signed short gyro_x_adc; /* 陀螺仪X轴原始值 */signed short gyro_y_adc; /* 陀螺仪Y轴原始值 */signed short gyro_z_adc; /* 陀螺仪Z轴原始值 */signed short accel_x_adc; /* 加速度计X轴原始值 */signed short accel_y_adc; /* 加速度计Y轴原始值 */signed short accel_z_adc; /* 加速度计Z轴原始值 */signed short temp_adc; /* 温度原始值 */
};static struct mpu6050_dev mpu6050dev;//-----------------------------------------------------------------------------------------------------------------------//
//mpu6050初始化等操作函数/** @description : 从mpu6050读取多个寄存器数据* @param - dev: mpu6050设备* @param - reg: 要读取的寄存器首地址 8bit* @param - val: 读取到的数据* @param - len: 要读取的数据长度* @return : 操作结果*/
static int mpu6050_read_regs(struct mpu6050_dev *dev, u8 reg, void *val, int len)
{int ret;struct i2c_msg msg[2]; //一个msg发送时序中的>=2Byte 用于存从机地址+数据struct i2c_client *client = (struct i2c_client *)dev->private_data; //结构体中存放从机地址,用到的i2c控制器信息/* msg[0] 2 Byte:从机地址+写+寄存机地址 */msg[0].addr = client->addr; /* mpu6050地址 7bit */msg[0].flags = 0; /* 0为写 1bit */msg[0].buf = ® /* 读取的首地址 8bit */msg[0].len = 1; /* reg长度*//* msg[1] 1+n_data Byte:从机地址+读+本地接收地址 */msg[1].addr = client->addr; /* mpu6050地址 */msg[1].flags = I2C_M_RD; /* 1为读 */msg[1].buf = val; /* 读取数据缓冲区 */msg[1].len = len; /* 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);//拜托i2c控制器发送相关信息 i2c1或i2c2if(ret == 2) {ret = 0;} else {printk("i2c rd failed=%d reg=%06x len=%d\n",ret, reg, len);ret = -EREMOTEIO;}return ret;
}/** @description : 读取mpu6050指定寄存器值,读取一个寄存器* @param - dev: mpu6050设备* @param - reg: 要读取的寄存器* @return : 读取到的寄存器值*/
static unsigned char mpu6050_read_reg(struct mpu6050_dev *dev, u8 reg)
{u8 data = 0;mpu6050_read_regs(dev, reg, &data, 1);return data;#if 0struct i2c_client *client = (struct i2c_client *)dev->private_data;return i2c_smbus_read_byte_data(client, reg);
#endif
}/** @description : 向mpu6050多个寄存器写入数据* @param - dev: mpu6050设备* @param - reg: 要写入的寄存器首地址* @param - buf: 要写入的数据缓冲区* @param - len: 要写入的数据长度* @return : 操作结果*/
static s32 mpu6050_write_regs(struct mpu6050_dev *dev, u8 reg, u8 *buf, u8 len)
{u8 b[256];struct i2c_msg msg;struct i2c_client *client = (struct i2c_client *)dev->private_data;b[0] = reg; /* 寄存器首地址 */memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 *//* msg:1+n_data Byte:从机地址+读+本地接收地址 */msg.addr = client->addr; /* mpu6050地址 7bit */msg.flags = 0; /* 0为写 1bit */msg.buf = b; /* 要写入的数据缓冲区 */msg.len = len + 1; /* 要写入的数据长度 */return i2c_transfer(client->adapter, &msg, 1);
}/** @description : 向mpu6050指定寄存器写入指定的值,写一个寄存器* @param - dev: mpu6050设备* @param - reg: 要写的寄存器* @param - data: 要写入的值* @return : 无*/
static void mpu6050_write_reg(struct mpu6050_dev *dev, u8 reg, u8 data)
{u8 buf = 0;//新建一个变量,可能更安全吧buf = data;mpu6050_write_regs(dev, reg, &buf, 1);
}/** @description : mpu6050相关寄存器的初始化* @return : 无。*/
void mpu6050_reginit(void)
{u8 value = 0;mpu6050_write_reg(&mpu6050dev, MPU6050_RA_PWR_MGMT_1, 0x80);mdelay(50);mpu6050_write_reg(&mpu6050dev, MPU6050_RA_PWR_MGMT_1, 0x01);mdelay(50);value = mpu6050_read_reg(&mpu6050dev, MPU6050_RA_WHO_AM_I);printk("mpu6050 ID = %#X\r\n", value); mpu6050_write_reg(&mpu6050dev, MPU6050_RA_SMPLRT_DIV, 0x00); /* 输出速率是内部采样率,采样频率 = 陀螺仪输出频率(1KHz) / (1+SMPLRT_DIV) */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_GYRO_CONFIG, 0x18); /* 陀螺仪±2000dps量程 */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_ACCEL_CONFIG, 0x18); /* 加速度计±16G量程 */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_CONFIG, 0x04); /* 陀螺仪低通滤波BW=20Hz */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_FF_THR, 0x04); /* 加速度计低通滤波BW=21.2Hz */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_PWR_MGMT_2, 0x00); /* 打开加速度计和陀螺仪所有轴 */// mpu6050_write_reg(&mpu6050dev, MPU6050_RA_PWR_MGMT_1, MPU6050_PWR1_CYCLE_BIT); /* 关闭低功耗 */mpu6050_write_reg(&mpu6050dev, MPU6050_RA_FIFO_EN, 0x00); /* 关闭FIFO */
}/** @description : 读取mpu6050的数据,读取原始数据* @return : 无。*/
void mpu6050_readdata(struct mpu6050_dev *dev)
{unsigned char data[14]; //0X3B~0X40:加速度计数据//0X41~0X42:温度值Temperature = 36.53 + regval/340//0X43~0X48:陀螺仪数据mpu6050_read_regs(dev, MPU6050_RA_ACCEL_XOUT_H, data, 14); //0x3B位置,连续14个寄存器,包括加速度、温度、角速度等数据//设备结构体收到了数据dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]); dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]); dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]); dev->temp_adc = (signed short)((data[6] << 8) | data[7]); dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]); dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
}//-----------------------------------------------------------------------------------------------------------------------//
//文件操作结构体部分/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int mpu6050_open(struct inode *inode, struct file *filp)
{filp->private_data = &mpu6050dev;//在所有文件操作函数中使用设备文件保存该设备结构体/* 每次打开设备文件,mpu6050时就初始化一次 */mpu6050_reginit();return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{signed short data[7];long err = 0;struct mpu6050_dev *dev = (struct mpu6050_dev *)filp->private_data;//从文件操作函数领域使用自己保存的设备结构体mpu6050_readdata(dev);//读到的数据存入了本设备结构体变量中//将数据从内核空间发送到用户空间data[0] = dev->gyro_x_adc;data[1] = dev->gyro_y_adc;data[2] = dev->gyro_z_adc;data[3] = dev->accel_x_adc;data[4] = dev->accel_y_adc;data[5] = dev->accel_z_adc;data[6] = dev->temp_adc;err = copy_to_user(buf, data, sizeof(data));return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int mpu6050_release(struct inode *inode, struct file *filp)
{return 0;
}/* mpu6050文件操作函数 */
static const struct file_operations mpu6050_ops = {.owner = THIS_MODULE,.open = mpu6050_open,.read = mpu6050_read,.release = mpu6050_release,
};//-----------------------------------------------------------------------------------------------------------------------//
//设备驱动结构体部分/** @description : i2c驱动的probe函数,当驱动与设备匹配以后此函数就会执行,就是初始化开头的mpu6050结构体中的各个变量 * @param - client : i2c设备* @param - id : i2c设备ID* @return : 0,成功;其他负值,失败*/
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{/* 1、构建设备号 */if (mpu6050dev.major) {mpu6050dev.devid = MKDEV(mpu6050dev.major, 0);register_chrdev_region(mpu6050dev.devid, MPU6050_CNT, MPU6050_NAME);} else {alloc_chrdev_region(&mpu6050dev.devid, 0, MPU6050_CNT, MPU6050_NAME);mpu6050dev.major = MAJOR(mpu6050dev.devid);}/* 2、注册字符设备 */cdev_init(&mpu6050dev.cdev, &mpu6050_ops); //有了设备号就能注册字符设备,提供文件操作函数并得到了相关字符设备资格cdev_add(&mpu6050dev.cdev, mpu6050dev.devid, MPU6050_CNT);/* 3、创建类 */mpu6050dev.class = class_create(THIS_MODULE, MPU6050_NAME);if (IS_ERR(mpu6050dev.class)) {return PTR_ERR(mpu6050dev.class);}/* 4、创建设备 */mpu6050dev.device = device_create(mpu6050dev.class, NULL, mpu6050dev.devid, NULL, MPU6050_NAME); //终于可以创建设备了if (IS_ERR(mpu6050dev.device)) {return PTR_ERR(mpu6050dev.device);}mpu6050dev.private_data = client;//i2c的设备和驱动匹配成功后,client就得到了设备树相关信息,这里设备结构体变量赶紧保存起来return 0;
}/** @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行* @param - client : i2c设备* @return : 0,成功;其他负值,失败*/
static int mpu6050_remove(struct i2c_client *client)
{/* 删除设备 */cdev_del(&mpu6050dev.cdev);unregister_chrdev_region(mpu6050dev.devid, MPU6050_CNT);/* 注销掉类和设备 */device_destroy(mpu6050dev.class, mpu6050dev.devid);class_destroy(mpu6050dev.class);return 0;
}/* 传统匹配方式ID列表 */
static const struct i2c_device_id mpu6050_id[] = {{"alientek,ap3216c", 0}, {}
};/* 设备树匹配列表 */
static const struct of_device_id mpu6050_of_match[] = {{ .compatible = "InvenSense,mpu6050" },{ /* Sentinel */ }
};/* i2c驱动结构体 */
static struct i2c_driver mpu6050_driver = {.probe = mpu6050_probe,.remove = mpu6050_remove,.driver = {.owner = THIS_MODULE,.name = "mpu6050",.of_match_table = mpu6050_of_match, },.id_table = mpu6050_id,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init mpu6050_init(void)
{int ret = 0;ret = i2c_add_driver(&mpu6050_driver);return ret;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit mpu6050_exit(void)
{i2c_del_driver(&mpu6050_driver);
}/* module_i2c_driver(mpu6050_driver) */module_init(mpu6050_init);
module_exit(mpu6050_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zxy");
5.3.4 App程序编写
就是一个简单的测试。
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : mpu6050App.c
作者 : 左忠凯
版本 : V1.0
描述 : mpu6050设备测试APP。
其他 : 无
使用方法 :./mpu6050App /dev/mpu6050
日志 :
***************************************************************//** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd;char *filename;signed short databuf[7];//都是2字节的ADC数据signed short gyro_x_adc, gyro_y_adc, gyro_z_adc;signed short accel_x_adc, accel_y_adc, accel_z_adc;signed short temp_adc;float gyro_x_act, gyro_y_act, gyro_z_act;float accel_x_act, accel_y_act, accel_z_act;float temp_act;//检查参数int ret = 0;if (argc != 2) {printf("Error Usage!\r\n");return -1;}/* 1、打开设备文件 */filename = argv[1];fd = open(filename, O_RDWR);if(fd < 0) {printf("can't open file %s\r\n", filename);return -1;}/* 2、读取设备文件 */while (1) {ret = read(fd, databuf, sizeof(databuf));if(ret == 0) { /* 数据读取成功 *//*adc值*/gyro_x_adc = databuf[0];//角速度gyro_y_adc = databuf[1];gyro_z_adc = databuf[2];accel_x_adc = databuf[3];//加速度accel_y_adc = databuf[4];accel_z_adc = databuf[5];temp_adc = databuf[6];//温度/*adc值->实际值*/gyro_x_act = (float)(gyro_x_adc) / 16.4;gyro_y_act = (float)(gyro_y_adc) / 16.4;gyro_z_act = (float)(gyro_z_adc) / 16.4;accel_x_act = (float)(accel_x_adc) / 2048;accel_y_act = (float)(accel_y_adc) / 2048;accel_z_act = (float)(accel_z_adc) / 2048;temp_act = ((float)(temp_adc) - 25 ) / 326.8 + 25;/*打印出来*/printf("\r\nADC value:\r\n");printf("gx = %d, gy = %d, gz = %d\r\n", gyro_x_adc, gyro_y_adc, gyro_z_adc);printf("ax = %d, ay = %d, az = %d\r\n", accel_x_adc, accel_y_adc, accel_z_adc);printf("temp = %d\r\n", temp_adc);printf("TRUE value:");printf("act gx = %.2f°/S, act gy = %.2f°/S, act gz = %.2f°/S\r\n", gyro_x_act, gyro_y_act, gyro_z_act);printf("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n", accel_x_act, accel_y_act, accel_z_act);printf("act temp = %.2f°C\r\n", temp_act);}usleep(1000000); /*100ms */}/* 3、关闭文件 */ close(fd); return 0;
}
六、ipslcd设计及应用
6.1 概述
6.3.1 ipslcd概述
ipslcd用于屏幕显示:
- 材料:高清IPS彩色屏
- 控制芯片:ST7789
接口类型:4线SPI接口- 工作电压:3.3V
8个引脚的描述:
- GND:电源地
- VCC:3.3V
- SCL:SPI时钟线(SCK)
- SDA:SPI数据线(MOSI)
- RES:显示屏复位管脚
- DC:SPI数据/命令选择角
- CS:SPI数据片选,低电平有效
- BLK:LED背光控制,默认可以悬空,低电平关闭背光(LED)
6.3.2 spi概述
SPI 全称是 SerialPerripheral Interface,也就是串行外围设备接口。 SPI 是 Motorola 公司推出的一种同步串行接口技术,是一种高速、全双工的同步通信总线, SPI 时钟频率相比 I2C 要高很多,最高可以工作在上百 MHz。
一般 SPI 需要4 根线:
CS/SS, Slave Select/Chip Select,这个是片选信号线,用于选择需要进行通信的从设备。I2C 主机是通过发送从机设备地址来选择需要进行通信的从机设备的, SPI 主机不需要发送从机设备,直接将相应的从机设备片选信号拉低即可。低电平使能。SCK, Serial Clock,串行时钟,和 I2C 的 SCL 一样,为 SPI 通信提供时钟。脉冲跳变时数据有效。MOSI/SDO, Master Out Slave In/Serial Data Output,简称主出从入信号线,这根数据线只能用于主机向从机发送数据,也就是主机输出,从机输入。MISO/SDI, Master In Slave Out/Serial Data Input,简称主入从出信号线,这根数据线只能用户从机向主机发送数据,也就是主机输入,从机输出。
SPI 有四种工作模式,通过串行时钟极性(CPOL)和相位(CPHA)的搭配来得到四种工作模式:
- CPOL=0,串行时钟空闲状态为低电平。
- CPOL=1,串行时钟空闲状态为高电平。
- CPHA=0,串行时钟的第一个跳变沿(上升沿或下降沿)采集数据。
- CPHA=1,串行时钟的第二个跳变沿(上升沿或下降沿)采集数据。

6.3.3 FrameBuffer概述
帧缓冲(framebuffer) 是Linux 系统为显示设备提供的一个接口,将内存中的一块儿显存抽象为一种设备,用户可直接通过fb操作函数控制这一块显存,进而反映到屏幕上。
framebuffer是个字符设备,主设备号为29,对应于/dev/fb%d 设备文件。
据说这事成了之后可以直接控制/dev/fbx,挺方便的。

6.2 硬件电路
芯片引脚复用:

原理图:

实物图:

6.3 软件编写
同样地,SPI设备驱动程序结构模型为:SPI设备(设备树描述)–SPI总线驱动(厂商提供)–>SPI设备驱动(自己编写)。
6.3.1 SPI总线驱动
这里就是 SOC 的 SPI控制器驱动,一旦编写完成就不需要再做修改,其他的SPI设备直接调用提供的API函数完成读写操作即可,正好符合 Linux 的驱动分离与分层的思想。这部分相关驱动NXP厂商已经帮我们写好了,可直接调用,但还是大概了解一下吧。
SPI控制器描述
描述为 spi_master,定义在 include/linux/spi/spi.h 。
//厂商已写好
struct spi_master {struct device dev;struct list_head list;...int (*transfer)(struct spi_device *spi, struct spi_message *mesg);...int (*transfer_one_message)(struct spi_master *master, struct spi_message *mesg);...
};
transfer 函数,和 i2c_algorithm 中的 master_xfer 函数一样,控制器数据传输函数。重点也是维护mesg。
spi_master 注册与注销
//注册
int spi_register_master(struct spi_master *master)
//注销
void spi_unregister_master(struct spi_master *master)
综上所述
SPI总线驱动(SPI控制器驱动)的主要工作就是
初始化spi_master结构体变量向系统注册设置好的spi_master。
更深一层
其实SPI总线驱动(SPI控制器驱动)内部也是是通过设备-总线-驱动这一结构模型完成的。示意图如下:
对SPI控制器:(控制器描述-platform总线驱动-控制器驱动)==>SPI总线驱动
对SPI设备:SPI设备–SPI总线驱动–>SPI设备驱动
也就是说我们写驱动程序时只针对SPI设备那一层,更深一层的驱动在spi-imx.c文件写好,内部有关于SPI控制器相关寄存器操作。
总线部分就是这些,就是对控制器驱动后又充当了外层设备的总线。
6.3.2 结合了framebuffer的SPI设备驱动
详细描述参考本文另一篇博文。
驱动目录/driver/staging/fbtft下已经将spi和framebuffer结合。
主要有以下几个角色文件:
- fbtft.h:连接源文件的头文件,主要的结构体、基本驱动框架、spi/platform框架。
fbtft_device.c:补充设备树未描述的硬件信息。st7789v.c:屏幕IC的驱动部分。- fbtft-core.c:核心层,匹配成功之后的probe函数,实现了一个 frambuffer 设备驱动。
- fbtft-bus.c:提供读写寄存器 / 显存的功能。
- fbtft-io.c:提供最底层的 spi 读写功能。
- fbtft-sysfs.c,导出一些调试接口。
在SPI总线驱动的设备树下添加ipslcd
这次设备树只负责引脚的说明,仅仅pinctrl、gpio子系统发挥了作用。
/* zxy ips_tftlcd 1.14 research imx6ul-pinfunc.h*/pinctrl_ecspi3: ipslcd {fsl,pins = < MX6UL_PAD_UART3_TX_DATA__GPIO1_IO24 0x10b0 /* RES */MX6UL_PAD_UART3_RX_DATA__GPIO1_IO25 0x10b0 /* DC */MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x10b0 /* CS */MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x10b1 /* SCLK high slew rate*/MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x10b1 /* MISO high slew rate*/MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x10b1 /* MOSI high slew rate*/>;};
.../* zxy ips_tftlcd */
&ecspi3 {fsl,spi-num-chipselects = <1>;res-gpios = <&gpio1 24 GPIO_ACTIVE_HIGH>;//用于自己的驱动resetdc-gpios = <&gpio1 25 GPIO_ACTIVE_HIGH>;//用于自己的驱动dccs-gpios = <&gpio1 20 GPIO_ACTIVE_LOW>; //spi-imx.c中的probe函数识别并使用该片选pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;//pinctrl子系统加载刚才配置的引脚,使其具有复用、电器属性status = "okay";/* ipslcd sub-node *//*spidev0: ipslcd@0 { //0表示片选 compatible = "zhongjing,ipslcd_st7789v";spi-max-frequency = <25000000>; //刷新频率有待商榷 reg = <0>;}; */
};
fbtft_device.c
描述设备树未描述完的设备信息,由于/driver/spi中的驱动自己在设备树中找到了cs片选,这里就不用描述了。
传给struct fbtft_device_display displays[]这个结构体用于匹配,之后在驱动初始化函数中申请硬件资源。
//name必须赋值,赋值为你要使用的驱动,这样才能和displays[].name匹配上,否则这里会使用默认的空,然后你就很难找到问题所在
static char *name = "zxy_ipslcd_st7789v";
//分析代码得知,这个必须设置 (即使设置了下面配置列表的busnum也无效,这里应该是原来代码的bug)
static unsigned busnum = 2;......//struct fbtft_device_display displays[]中添加自己的设备信息
{ //zxy ipslcd st7789v 设备硬件描述,替代设备树.name = "zxy_ipslcd_st7789v",.spi = &(struct spi_board_info) {.modalias = "fb_st7789v", //用于匹配driver.max_speed_hz = 25000000, //25MHz.bus_num = 2, //spi总线编号 ecspi3==spi2.0//.chip_select = 0, //片选初始化电平.mode = SPI_MODE_0, //spi模式.platform_data = &(struct fbtft_platform_data) {.display = {.buswidth = 8, //总线宽度//.backlight = 1, //背光},.bgr = false, //背景 一般为false.gpios = (const struct fbtft_gpio []) { //gpio设置,前提是IO复用和电气属性已经配置{ "reset", 24 }, //指定reset gpio号{ "dc", 25 }, //指定dc gpio号//{ "cs", 20 }, //指定cs gpio号//{ "led", 3 },//{},},}}}
st7789v.c
在这就可以参考之前写的那个测试驱动初始化函数。
里边儿写的这些主要有初始化函数、设置窗口函数。
最后传给struct fbtft_display display这个结构体变量。
本来也写了个测试刷屏的函数,写完之后启动内核的时候可就炸了,直接failed,吓得咱赶紧去掉,或许是内核的启动内存控制比较严格吧,不小心给弄的栈溢出了。
/** FB driver for the st7789s LCD display controller** This display uses 9-bit SPI: Data/Command bit + 8 data bits* For platforms that doesn't support 9-bit, the driver is capable* of emulating this using 8-bit transfer.* This is done by transferring eight 9-bit words in 9 bytes.** Copyright (C) 2013 Christian Vogelgsang* Based on adafruit22fb.c by Noralf Tronnes** This program is free software; you can redistribute it and/or modify* it under the terms of the GNU General Public License as published by* the Free Software Foundation; either version 2 of the License, or* (at your option) any later version.** This program is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* GNU General Public License for more details.** You should have received a copy of the GNU General Public License* along with this program; if not, write to the Free Software* Foundation, Inc., 675 Mass Ave, Cambridge, MA 02139, USA.*/#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <linux/spi/spi.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/platform_device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/slab.h>#include "fbtft.h"/*
author : zxy
describe: 搞了好几天也没搞好,正愁着,看了一眼zhihui大佬的驱动,原来这个驱动是叫st7789vw,调试时候,单独写的驱动模块,屏幕初始化,按照中景源码写的,调试OK使用fbtft这一部分接近内核,就有点儿陌生了,调了好几天,确定了以下代码,和其他屏幕不同,如此的小屏幕,还是发命令,发字节啥的都自己写一遍吧,都交给通用源码恐难以消受。不管怎样,这也算搞好了。
日志: 2022.2.17 更新为240*280 ipslcd 屏幕
*/#define DRVNAME "fb_st7789v"
#define WIDTH 280//如果旋转了角度,这里的宽高需要对调
#define HEIGHT 240
#define DEFAULT_GAMMA \"D0 04 0D 11 13 2B 3F 54 4C 18 0D 0B 1F 23\n" \"D0 04 0C 11 13 2C 3F 44 51 2F 1F 1F 20 23" //颜色细调,非专业人士请勿靠近,默认/* 写命令 */
static int ipslcd_write_command(struct fbtft_par *par, u8 cmd)
{int ret;gpio_set_value(par->gpio.dc, 0);ret = par->fbtftops.write(par, &cmd, 1);if (ret < 0)dev_err(par->info->device,"write() failed and returned %d\n", ret);gpio_set_value(par->gpio.dc, 1);return ret;
}/* 写数据 8bit */
static int ipslcd_write_data8(struct fbtft_par *par, u8 data)
{int ret;ret = par->fbtftops.write(par, &data, 1);if (ret < 0)dev_err(par->info->device,"write() failed and returned %d\n", ret);return ret;
}/* 硬件复位 */
static void reset(struct fbtft_par *par)
{if(par->gpio.reset == -1)return;gpio_set_value(par->gpio.reset, 0);mdelay(200);gpio_set_value(par->gpio.reset, 1);mdelay(200);printk("Reset screen done.\n");
}/* st7789初始化函数 */
static int init_display(struct fbtft_par *par)
{par->fbtftops.reset(par);//硬件复位,防止之前的设置干扰当前配置printk("**********************************zxy:screen init_display...*************************************************\r\n");//************* Start Initial Sequence **********//ipslcd_write_command(par, 0x11);mdelay(120);ipslcd_write_command(par, 0x36);//控制屏幕旋转的寄存器ipslcd_write_data8(par, 0xA0);/*竖屏:0x00或0xC0横屏:0x70或0xA0修改之后对应的设置窗口函数边框也要微调。*/ipslcd_write_command(par, 0x3A);ipslcd_write_data8(par, 0x05);ipslcd_write_command(par, 0xB2);ipslcd_write_data8(par, 0x0C);ipslcd_write_data8(par, 0x0C);ipslcd_write_data8(par, 0x00);ipslcd_write_data8(par, 0x33);ipslcd_write_data8(par, 0x33); ipslcd_write_command(par, 0xB7); ipslcd_write_data8(par, 0x35); ipslcd_write_command(par, 0xBB);ipslcd_write_data8(par, 0x32); //Vcom=1.35V//ipslcd_write_command(par, 0xC0);//ipslcd_write_data8(par, 0x2C);ipslcd_write_command(par, 0xC2);ipslcd_write_data8(par, 0x01);ipslcd_write_command(par, 0xC3);ipslcd_write_data8(par, 0x15); //GVDD=4.8V 颜色深度ipslcd_write_command(par, 0xC4);ipslcd_write_data8(par, 0x20); ipslcd_write_command(par, 0xC6); ipslcd_write_data8(par, 0x0F); //0x0F:60Hzipslcd_write_command(par, 0xD0); ipslcd_write_data8(par, 0xA4);ipslcd_write_data8(par, 0xA1);ipslcd_write_command(par, 0xE0);ipslcd_write_data8(par, 0xD0);ipslcd_write_data8(par, 0x08);ipslcd_write_data8(par, 0x0E);ipslcd_write_data8(par, 0x09);ipslcd_write_data8(par, 0x09);ipslcd_write_data8(par, 0x05);ipslcd_write_data8(par, 0x31);ipslcd_write_data8(par, 0x33);ipslcd_write_data8(par, 0x48);ipslcd_write_data8(par, 0x17);ipslcd_write_data8(par, 0x14);ipslcd_write_data8(par, 0x15);ipslcd_write_data8(par, 0x31);ipslcd_write_data8(par, 0x34);ipslcd_write_command(par, 0xE1);ipslcd_write_data8(par, 0xD0);ipslcd_write_data8(par, 0x08);ipslcd_write_data8(par, 0x0E);ipslcd_write_data8(par, 0x09);ipslcd_write_data8(par, 0x09);ipslcd_write_data8(par, 0x15);ipslcd_write_data8(par, 0x31);ipslcd_write_data8(par, 0x33);ipslcd_write_data8(par, 0x48);ipslcd_write_data8(par, 0x17);ipslcd_write_data8(par, 0x14);ipslcd_write_data8(par, 0x15);ipslcd_write_data8(par, 0x31);ipslcd_write_data8(par, 0x34);ipslcd_write_command(par, 0x21); ipslcd_write_command(par, 0x29);//ipslcd_test_fill(par, 0x001F);printk("**********************************zxy:screen init_display...finish*************************************************\r\n");return 0;
}/* st7789设置窗口函数 */
static void set_addr_win(struct fbtft_par *par, int xs, int ys, int xe, int ye)
{/* adjustment 去除屏幕黑边儿*/ xs += 20; xe += 20;/* Column address set */write_reg(par, 0x2A,(xs >> 8) & 0xFF, xs & 0xFF, (xe >> 8) & 0xFF, xe & 0xFF);/* Row address set */write_reg(par, 0x2B,(ys >> 8) & 0xFF, ys & 0xFF, (ye >> 8) & 0xFF, ye & 0xFF);/* Memory write */write_reg(par, 0x2C);
}/* 一些硬件参数 初始化、窗口 */
static struct fbtft_display display = {.regwidth = 8, //IC 8bit.width = WIDTH,.height = HEIGHT,.gamma_num = 2, //gamma的暂时默认.gamma_len = 14,.gamma = DEFAULT_GAMMA,.fbtftops = {.reset = reset,.init_display = init_display,.set_addr_win = set_addr_win,},
};
FBTFT_REGISTER_DRIVER(DRVNAME, "zj,st7789v", &display); //兼容性compatible fbtft.hMODULE_ALIAS("spi:" DRVNAME);
MODULE_ALIAS("platform:" DRVNAME);
MODULE_ALIAS("spi:st7789v");
MODULE_ALIAS("platform:st7789v");MODULE_DESCRIPTION("FB driver for the st7789v LCD display controller");
MODULE_AUTHOR("zxy");
MODULE_LICENSE("GPL");
*/图形界面配置
打开自己添加的驱动加入编译队列,/driver/staging/fbtft:
- Kconfig
config FB_TFT_ST7789Vtristate "FB driver for the ST7789V LCD Controller"depends on FB_TFThelpGeneric Framebuffer support for ST7789V
- Makefile
obj-$(CONFIG_FB_TFT_ST7789V) += fb_st7789v.o # 根据Kconfig 告诉编译器,我是否要得到这个文件
-
设置自己的驱动编译进内核

按“Y”,编译进内核。
-
禁止掉原子那个大LCD驱动编译
按“N”,禁止编译。
最后启动内核,会在板子上出现/dev/fb0节点,且显示终端。
遇到的问题:
1、就是那个fbtft_device.c中的开头的内部链接静态变量name没有说明,导致怎么改,都匹配不上,都逼得我在这些代码中加printk了,一次次启动内核,看看到底程序运行到哪,有没有进入probe函数。这个文件应该可以编译为模块,在终端输入参数启动,所以才有这种静态变量的。
2、解决了匹配问题,能进probe函数了,可是没有产生/dev/fbx节点,通过本人设置printk,耐心的观察内核启动信息,找到了错误地方,原来是设备描述中gpio请求失败。应该是fbtft_device.c有其他的驱动使用了这两个引脚,反正也只用一个屏幕,索性就把其他的引脚都注释了。
/sys/kernel/debug/gpio可以查看板子上gpio使用情况。
3、结果还是不行,一“hai”解千愁,发现没有给驱动中的display结构体配置reset文件函数,而我的小屏幕这么脆弱,默认的延时肯定很短,承受不起。
看了默认的果然是,默认的中间20us,这咱的小屏幕哪反应的过来呀。
自己写一个吧,商家的参考程序反应时间也得200ms,只要你写了的函数,他就不会使用默认值,还是很人性化的。
make V=1 all 2>info.log可以将编译到终端中有error、warning等标准错误输出信息存到文件中便于查看。
七、摄像头设计及应用
7.1 概述
OV5640 是 OV(OmniVision)公司生产的一颗 1/4 寸的 CMOS QSXGA(2592*1944)图像传感器,提供了一个完整的 500W 像素摄像头解决方案,并且集成了自动对焦(AF)功能,具有非常高的性价比。
该传感器体积小、工作电压低,提供单片 QSXGA 摄像头和影像处理器的所有功能。通过 SCCB 总线控制,可以输出整帧、子采样、缩放和取窗口等方式的各种分辨率 8/10 位影像数据。该产品 QSXGA 图像最高达到 15 帧/秒(1080P 图像可达 30 帧, 720P 图像可达 60帧, QVGA 分辨率时可达 120 帧)。用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、白平衡、对比度、色度等都可以通过 SCCB 接口编程。
OV5640 的特点有:
- 支持图像缩放、平移和窗口设置
- 支持图像压缩,即可输出 JPEG 图像数据
- 支持数字视频接口(DVP)和 MIPI 接口
- 支持自动对焦
- 自带嵌入式微处理器
标准的 SCCB 接口,兼容 IIC 接口
功能框图


7.2 硬件电路
原理图:


实物图:

7.3 软件编写
这部分详见本文博文。
7.3.1 设备树配置
/* iomxc复用 注意这里使用的引脚,其他设备就不能使用了,找到并注释掉*/
//pinctrl_csi1 pinctrl子系统
pinctrl_csi1: csi1grp {fsl,pins = <MX6UL_PAD_CSI_MCLK__CSI_MCLK 0x1b088MX6UL_PAD_CSI_PIXCLK__CSI_PIXCLK 0x1b088MX6UL_PAD_CSI_VSYNC__CSI_VSYNC 0x1b088MX6UL_PAD_CSI_HSYNC__CSI_HSYNC 0x1b088MX6UL_PAD_CSI_DATA00__CSI_DATA02 0x1b088MX6UL_PAD_CSI_DATA01__CSI_DATA03 0x1b088MX6UL_PAD_CSI_DATA02__CSI_DATA04 0x1b088MX6UL_PAD_CSI_DATA03__CSI_DATA05 0x1b088MX6UL_PAD_CSI_DATA04__CSI_DATA06 0x1b088MX6UL_PAD_CSI_DATA05__CSI_DATA07 0x1b088MX6UL_PAD_CSI_DATA06__CSI_DATA08 0x1b088MX6UL_PAD_CSI_DATA07__CSI_DATA09 0x1b088>;
};
//csi_pwn_rst pinctrl子系统
csi_pwn_rst: csi_pwn_rstgrp {fsl,pins = <MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x10b0MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0x10b0>;
};/* ov5640设备树 */
ov5640: ov5640@3c {compatible = "ovti,ov5640";reg = <0x3c>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_csi1&csi_pwn_rst>;clocks = <&clks IMX6UL_CLK_CSI>;clock-names = "csi_mclk";pwn-gpios = <&gpio1 4 1>;rst-gpios = <&gpio1 2 0>;csi_id = <0>;mclk = <24000000>;mclk_source = <0>;status = "okay";port {ov5640_ep: endpoint {remote-endpoint = <&csi1_ep>;};};
};
7.3.2 源码拷贝
出厂源码路径:linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek/drivers/media/platform/mxc,复制当前文件夹到自己开发版本的对应路径下。
配置文件
事情是这样的,原子linux提供了两套linux源码:
1、专用于文档教程的源码,内部包括无线wifi驱动源码。
2、开发板出厂展示的源码,内部包括ov5640的源码,相关配置文件选项很全面。
我们基于文档教程的源码开发所有功能,因此需要将ov5640源码移植过去,并使用全面的那个配置文件编译ov5640驱动。
配置过程:
出厂源码/arch/arm/configs/imx_alientek_emmc_defconfig复制到教程源码/arch/arm/configs/。- linux内核编译是依赖于
教程源码/.config,其实imx_alientek_emmc_defconfig和.config都是一个意思。
将名字改为.config即可进入图形界面配置,每次配置完一项功能就保存.config,配置其他功能再接着用。
(使用make xxx_defconfig用于将imx_alientek_emmc_defconfig重新保存在教程源码/.config,不过这里不用)
Location: │ │ -> Device Drivers │ │ -> Multimedia support (MEDIA_SUPPORT [=y]) │ │ -> V4L platform devices (V4L_PLATFORM_DRIVERS [=y])
具体配置不用改,出厂源码配置已经设置好了。
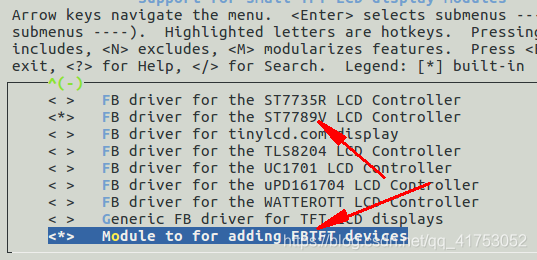
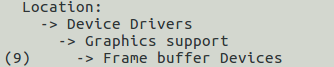
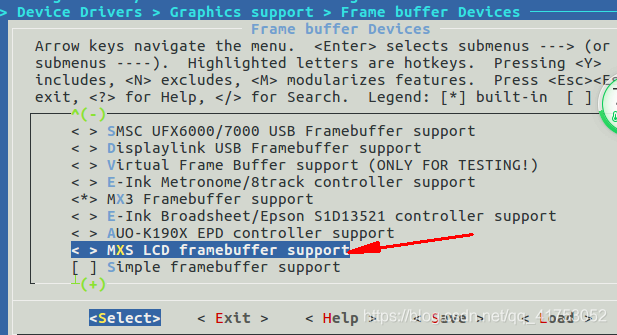
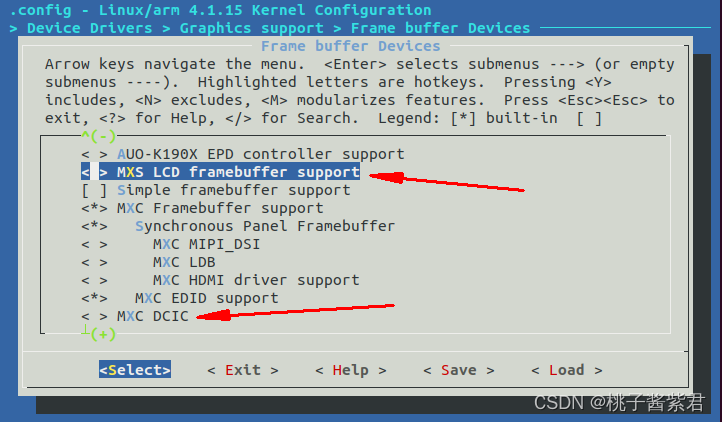
这里遇到的问题,虽然摄像头可以驱动了,但出厂配置文件太全面。到了屏幕开发阶段,想使用ipslcd必须关闭原配4.3寸LCD,关掉原配LCD的配置如下:
- 配置路径(直接使用新配置的.config)
Location: │ │ -> Device Drivers │ │ -> Graphics support │ │ -> Frame buffer Devices
- 具体设置:尤其注意箭头位置
7.3.3 编译生成驱动模块
在.config的指导下,经过linux源码编译,在mxc/subdev下找到两个驱动模块,放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可),板子上电,modprobe注册这两个驱动。
/dev下出现video1说明驱动成功啦!!
- ov5640_camera:用于摄像头的驱动。
- mx6s_capture:用于板子捕获相关驱动。
7.3.4 APP程序编写
只需操作ov5640提供的video1设备接口和ipslcd提供的fb0设备接口,复制原子应用开发教程中的源码。
/***************************************************************Copyright © ALIENTEK Co., Ltd. 1998-2021. All rights reserved.文件名 : v4l2_camera.c作者 : 邓涛版本 : V1.0描述 : V4L2摄像头应用编程实战其他 : 无论坛 : www.openedv.com日志 : 初版 V1.0 2021/7/09 邓涛创建***************************************************************/#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <string.h>
#include <errno.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <linux/fb.h>#define FB_DEV "/dev/fb0" //LCD设备节点
#define FRAMEBUFFER_COUNT 3 //帧缓冲数量/*** 摄像头像素格式及其描述信息 ***/
typedef struct camera_format {unsigned char description[32]; //字符串描述信息unsigned int pixelformat; //像素格式
} cam_fmt;/*** 描述一个帧缓冲的信息 ***/
typedef struct cam_buf_info {unsigned short *start; //帧缓冲起始地址unsigned long length; //帧缓冲长度
} cam_buf_info;static int width; //LCD宽度
static int height; //LCD高度
static unsigned short *screen_base = NULL;//LCD显存基地址
static int fb_fd = -1; //LCD设备文件描述符
static int v4l2_fd = -1; //摄像头设备文件描述符
static cam_buf_info buf_infos[FRAMEBUFFER_COUNT];
static cam_fmt cam_fmts[10];
static int frm_width, frm_height; //视频帧宽度和高度static int fb_dev_init(void)
{struct fb_var_screeninfo fb_var = {0};struct fb_fix_screeninfo fb_fix = {0};unsigned long screen_size;/* 打开framebuffer设备 */fb_fd = open(FB_DEV, O_RDWR);if (0 > fb_fd) {fprintf(stderr, "open error: %s: %s\n", FB_DEV, strerror(errno));return -1;}/* 获取framebuffer设备信息 */ioctl(fb_fd, FBIOGET_VSCREENINFO, &fb_var);ioctl(fb_fd, FBIOGET_FSCREENINFO, &fb_fix);screen_size = fb_fix.line_length * fb_var.yres;width = fb_var.xres;height = fb_var.yres;/* 内存映射 */screen_base = mmap(NULL, screen_size, PROT_READ | PROT_WRITE, MAP_SHARED, fb_fd, 0);if (MAP_FAILED == (void *)screen_base) {perror("mmap error");close(fb_fd);return -1;}/* LCD背景刷白 */memset(screen_base, 0xFF, screen_size);return 0;
}static int v4l2_dev_init(const char *device)
{struct v4l2_capability cap = {0};/* 打开摄像头 */v4l2_fd = open(device, O_RDWR);if (0 > v4l2_fd) {fprintf(stderr, "open error: %s: %s\n", device, strerror(errno));return -1;}/* 查询设备功能 */ioctl(v4l2_fd, VIDIOC_QUERYCAP, &cap);/* 判断是否是视频采集设备 */if (!(V4L2_CAP_VIDEO_CAPTURE & cap.capabilities)) {fprintf(stderr, "Error: %s: No capture video device!\n", device);close(v4l2_fd);return -1;}return 0;
}static void v4l2_enum_formats(void)
{struct v4l2_fmtdesc fmtdesc = {0};/* 枚举摄像头所支持的所有像素格式以及描述信息 */fmtdesc.index = 0;fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FMT, &fmtdesc)) {// 将枚举出来的格式以及描述信息存放在数组中cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat;strcpy(cam_fmts[fmtdesc.index].description, fmtdesc.description);fmtdesc.index++;}
}static void v4l2_print_formats(void)
{struct v4l2_frmsizeenum frmsize = {0};struct v4l2_frmivalenum frmival = {0};int i;frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;for (i = 0; cam_fmts[i].pixelformat; i++) {printf("format<0x%x>, description<%s>\n", cam_fmts[i].pixelformat,cam_fmts[i].description);/* 枚举出摄像头所支持的所有视频采集分辨率 */frmsize.index = 0;frmsize.pixel_format = cam_fmts[i].pixelformat;frmival.pixel_format = cam_fmts[i].pixelformat;while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMESIZES, &frmsize)) {printf("size<%d*%d> ",frmsize.discrete.width,frmsize.discrete.height);frmsize.index++;/* 获取摄像头视频采集帧率 */frmival.index = 0;frmival.width = frmsize.discrete.width;frmival.height = frmsize.discrete.height;while (0 == ioctl(v4l2_fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival)) {printf("<%dfps>", frmival.discrete.denominator /frmival.discrete.numerator);frmival.index++;}printf("\n");}printf("\n");}
}static int v4l2_set_format(void)
{struct v4l2_format fmt = {0};struct v4l2_streamparm streamparm = {0};/* 设置帧格式 */fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//type类型fmt.fmt.pix.width = width; //视频帧宽度fmt.fmt.pix.height = height;//视频帧高度fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB565; //像素格式if (0 > ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt)) {fprintf(stderr, "ioctl error: VIDIOC_S_FMT: %s\n", strerror(errno));return -1;}/*** 判断是否已经设置为我们要求的RGB565像素格式如果没有设置成功表示该设备不支持RGB565像素格式 */if (V4L2_PIX_FMT_RGB565 != fmt.fmt.pix.pixelformat) {fprintf(stderr, "Error: the device does not support RGB565 format!\n");return -1;}frm_width = fmt.fmt.pix.width; //获取实际的帧宽度frm_height = fmt.fmt.pix.height;//获取实际的帧高度printf("视频帧大小<%d * %d>\n", frm_width, frm_height);/* 获取streamparm */streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;ioctl(v4l2_fd, VIDIOC_G_PARM, &streamparm);/** 判断是否支持帧率设置 **/if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability) {streamparm.parm.capture.timeperframe.numerator = 1;streamparm.parm.capture.timeperframe.denominator = 30;//30fpsif (0 > ioctl(v4l2_fd, VIDIOC_S_PARM, &streamparm)) {fprintf(stderr, "ioctl error: VIDIOC_S_PARM: %s\n", strerror(errno));return -1;}}return 0;
}static int v4l2_init_buffer(void)
{struct v4l2_requestbuffers reqbuf = {0};struct v4l2_buffer buf = {0};/* 申请帧缓冲 */reqbuf.count = FRAMEBUFFER_COUNT; //帧缓冲的数量reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;reqbuf.memory = V4L2_MEMORY_MMAP;if (0 > ioctl(v4l2_fd, VIDIOC_REQBUFS, &reqbuf)) {fprintf(stderr, "ioctl error: VIDIOC_REQBUFS: %s\n", strerror(errno));return -1;}/* 建立内存映射 */buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {ioctl(v4l2_fd, VIDIOC_QUERYBUF, &buf);buf_infos[buf.index].length = buf.length;buf_infos[buf.index].start = mmap(NULL, buf.length,PROT_READ | PROT_WRITE, MAP_SHARED,v4l2_fd, buf.m.offset);if (MAP_FAILED == buf_infos[buf.index].start) {perror("mmap error");return -1;}}/* 入队 */for (buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {if (0 > ioctl(v4l2_fd, VIDIOC_QBUF, &buf)) {fprintf(stderr, "ioctl error: VIDIOC_QBUF: %s\n", strerror(errno));return -1;}}return 0;
}static int v4l2_stream_on(void)
{/* 打开摄像头、摄像头开始采集数据 */enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;if (0 > ioctl(v4l2_fd, VIDIOC_STREAMON, &type)) {fprintf(stderr, "ioctl error: VIDIOC_STREAMON: %s\n", strerror(errno));return -1;}return 0;
}static void v4l2_read_data(void)
{struct v4l2_buffer buf = {0};unsigned short *base;unsigned short *start;int min_w, min_h;int j;if (width > frm_width)min_w = frm_width;elsemin_w = width;if (height > frm_height)min_h = frm_height;elsemin_h = height;buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;for ( ; ; ) {for(buf.index = 0; buf.index < FRAMEBUFFER_COUNT; buf.index++) {ioctl(v4l2_fd, VIDIOC_DQBUF, &buf); //出队for (j = 0, base=screen_base, start=buf_infos[buf.index].start;j < min_h; j++) {memcpy(base, start, min_w * 2); //RGB565 一个像素占2个字节base += width; //LCD显示指向下一行start += frm_width;//指向下一行数据}// 数据处理完之后、再入队、往复ioctl(v4l2_fd, VIDIOC_QBUF, &buf);}}
}int main(int argc, char *argv[])
{if (2 != argc) {fprintf(stderr, "Usage: %s <video_dev>\n", argv[0]);exit(EXIT_FAILURE);}/* 初始化LCD */if (fb_dev_init())exit(EXIT_FAILURE);/* 初始化摄像头 */if (v4l2_dev_init(argv[1]))exit(EXIT_FAILURE);/* 枚举所有格式并打印摄像头支持的分辨率及帧率 */v4l2_enum_formats();v4l2_print_formats();/* 设置格式 */if (v4l2_set_format())exit(EXIT_FAILURE);/* 初始化帧缓冲:申请、内存映射、入队 */if (v4l2_init_buffer())exit(EXIT_FAILURE);/* 开启视频采集 */if (v4l2_stream_on())exit(EXIT_FAILURE);/* 读取数据:出队 */v4l2_read_data(); //在函数内循环采集数据、将其显示到LCD屏exit(EXIT_SUCCESS);
}编译生成App文件放到板子里。
./App名字 /dev/video1
八、其他功能
8.1 无线WiFi应用
该部分见本人博文
实物图

驱动成功后,启动系统重要的操作就是:
接口配置
/etc/network/interfaces.d/wlan0
auto wlan0
iface wlan0 inet static //设置为静态ip,不适用dhcp,以免相互冲突
address 192.168.18.34
netmask 255.255.255.0
gateway 192.168.18.1
连接无线
ifconfig -a //查看所有可驱动网口ifconfig wlan0 up//打开wlan0网口,即wifi部分iwlist wlan0 scanning//扫描所有热点//配置连接热点的文件,格式要求严格,2个空格缩进/etc/wpa_supplicant.conf
文件中:ctrl_interface=/var/run/wpa_supplicantap_scan=1network={ssid="热点名"psk="密码"}
//新建缓存文件
mkdir /var/run/wpa_supplicant -p
//最后一步连接热点
wpa_supplicant -Dwext -iwlan0 -c/etc/wpa_supplicant.conf &
// /etc/network/interfaces.d/wlan0下改一下ip地址和网关地址
// /etc/resolv.conf下改一下网关地址
//最后重启网络配置
/etc/init.d/networking restart
8.2 扩展接口
设置扩展接口,用于后期外接其他有趣的设备。
复用接口

电路图

8.3 未安排的
。。。(略)
九、结果展示
PCB绘制结果

PCB打板结果
过了几天,板子来了。

焊接结果
经过一天的焊接,完成。

开机显示
有了小熊板的制作经验,一次成功,!!!

B站稿件
制作过程留下了一些痕迹,都整理为小视频了。前往观看
上传到了gitee仓库