目录
一、C-HUD、W-HUD、AR-HUD
1.实际考虑车外环境信息与相对位置
2.实时考虑驾驶员眼睛的位置
二、ADAS
1、定义
2、ADAS关键节点
3 、主要功能
A.信息辅助
第一类行车监控类
第二类危险预警类
第三类是驾驶便利类
IA信息辅助类整体列表
B、控制辅助
第一类紧急应对类
第二类为驾驶便利类
第三类是车道保持类
第四类是智能灯光类
CA控制辅助类整体列表
4、ADAS八大分系统详解
1、车道偏离预警系统+车道保持
2、预碰撞系统+紧急制动系统
3、盲点监控系统
4、自动泊车系统
5、自适应巡航系统
6、驾驶员疲劳监测系统
7、自适应照明控制
8、夜视系统
三、四种主流 AR HUD成像方案TFT
1.TFT
2.DLP
3.LCOS
4.LBS-MEMS激光投影
5.几种成像方式对比
一、C-HUD、W-HUD、AR-HUD
为什么C-HUD与W-HUD被称为传统HUD,特意将AR-HUD区分出来,根本区别是什么?
换个问法:AR-HUD的技术原理除了大家都有的发光、反射、成象之外,还有哪些独特之处吗?
AR-HUD有一个重大独特之外,使它的技术难度大大增加,也使它与ADAD功能的关系非常紧密:那就是AR-HUD必须要根据实时考虑车外环境信息与相对位置,同时要实时考虑驾驶员眼睛的位置。
1.实际考虑车外环境信息与相对位置
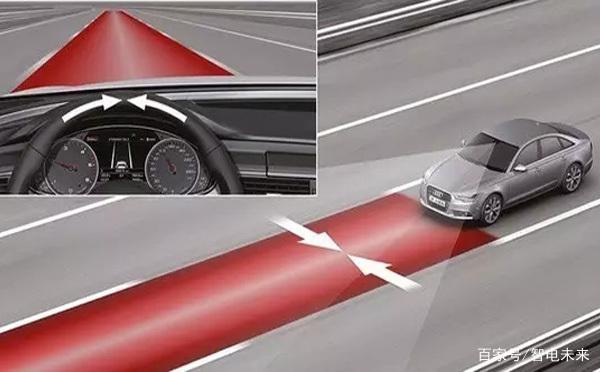
沿着车道的箭头、行人头上的警告信息,显示的位置必须要与车外环境融合在一起,否则不就乱道了吗? 而C-HUD、W-HUD并不显示这些信息。

2.实时考虑驾驶员眼睛的位置
众所周知,光沿直线传播。AR-HUD投射的各种符号,如果想给驾驶员一种“它恰好在车下方、行人头上”的错觉,就必须根据人眼的位置来实时调整大粗红线的位置。

所谓的感知车外环境、感知驾驶员状态,不正是ADAS的基础操作吗?
所以AR-HUD与ADAS的关系非常紧密,相互作用体现在两点:
- AR-HUD的工作原理,依赖于ADAS系统的感知功能。
- ADAS系统增加了驾驶员的认知负荷,使用AR-HUD可以提高交互效率,让驾驶更安全、更舒适。
总体来说,别说AR-HUD的,传统HUD的渗透率都不算高,离主流还差很远:
随着技术进步,AR-HUD可以承载越来越多的交互信息,成为人机交互的主要方式。但是,由于对光线强度敏感,它目前还不能替代仪表。
二、ADAS
1、定义
ADAS(Advanced Driving Assistance System)高级辅助驾驶系统,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而提供信息辅助、预警、辅助控制及便利驾驶的主动安全技术。
ADAS采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS技术来说,主动式干预也很常见。
先进驾驶辅助系统可以分为2大类36小类功能。
翻译成白话文就是,就是利用安装在车上的各式各样传感器收集数据,并结合地图数据进行系统计算,从而预先为驾驶者判断可能发生的危险,保证行车的安全性,
在这里我们要明确一个概念,ADAS不是现在非常红的自动驾驶,可以说这两者的研究重点完全不同。ADAS是辅助驾驶,核心是环境感知,而自动驾驶则是人工智能,体系有很大差别。
不过ADAS也可以视作自动驾驶汽车的前提,我们来看一张美国道路交通安全局(NHTSA)所发布的汽车自动化阶段图:

ADAS实现的是第3级,而自动驾驶实现的是第4级。想要从第3级发展到第4级,还需要更多的汽车上配有自动驾驶技术,而且得配合道路基础设施建设(道路上的摄像头,清晰的车道线),以及需要汽车互联,汽车手机互联等等,是个非常庞大的工程。
2、ADAS关键节点
我们可以想象一下ADAS执行任务时候所需要的整个过程:感知、判断、执行,就不难得出其大致的产业链了。
1、 感知
汽车不像人类有五官,汽车感知环境数据的方式是依靠各类传感器。而传感器搭载数量越多,汽车能收集到的信息就越多。
目前ADAS主要采用的传感器有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
大部份ADAS采用摄像头+雷达的组合方式,以实现雷达测距与摄像头图像识别功能的互补。主动式与被动式红外夜视系统是两种主流的技术路线。主动式通过CCD接受物体反射的对应敏感频谱成像,而被动式的红外焦平面探测器接受物体的红外辐射成像。两者各有优势,将在较长时间内共存。
2、 判断
前面说到传感器让汽车可以像人类一样有感知,而能够让汽车作出判断的核心灵魂就是算法了。根据传感器等输入数据,行车电脑可以取代司机主动发出控制的指令。
算法是ADAS系统可靠性、准确度的决定性因素,主要包括摄像头/雷达测距、行人识别、道路交通标志识别等,针对前装应用的可靠性要求高,需要进行大量的场景测试与标定。其中雷达标定的门槛最高。
3、 执行
ADAS系统通过传感器获取数据,主芯片完成判断后,初级应用通过声音、图像、振动对驾驶者进行警示。与电子控制功能结合后,逐渐进化到对车辆的自动控制。

3 、主要功能
A.信息辅助
第一类为IA(Information Assist)信息辅助类功能,共21项,这些功能均不包含驾驶行为的控制;

这些功能又可以进一步细分为三类:
第一类行车监控类
在车辆的不同使用场景下,对道路信息如交通标志、道路限速、车辆周边影像等信息进行采集显示,方便驾驶员使用。

第二类危险预警类
车辆通过获取车辆内部(驾驶员)、车辆外部(车辆、行人、障碍物碰撞、限速、道路状况)状态信息,判定或预测各种潜在危险事件并进行预警或提示。这里面的低速行车辅助是一个偏综合性的功能,包含了一些其它的基础功能,具体定义如下:
MALSO低速行车辅助:车辆行驶时,探测其周围障碍物,并当车辆靠近障碍物时为驾驶员提供影像或警告信息;

第三类是驾驶便利类
这些功能可以在无光/暗光、减少驾驶员低头、倒车等特定场景下提升驾驶的便利性和安全性。

IA信息辅助类整体列表
(Information Assist)
- DFM (Driver Fatigue Monitoring)驾驶员疲劳监测
- DAM(Driver Attention Monitoring)驾驶员注意力监测
- TSR(Traffic Signs Recognition)交通标志识别
- ISLI(Intelligent Speed Limit Information)智能限速提示
- CSW(Curve Speed Warning)弯道速度预警
- HUD(Head Up Display)抬头显示
- AVM(Around View Montoring)全息影像监测
- NV(Night Vision)夜视
- FDM(Front Distance Monitoring)前向车距监测
- FCW(Front Collision Warning)前向碰撞预警
- RCW(Rear Collision Warning)后向碰撞预警
- LDW(Lane Departure Warning)车道偏离预警
- LCW (Lane Changing Warning)变道碰撞预警
- BSD(Blind Spot Detection)盲区监测
- SBSD(Side Blind Spot Detection)侧面盲区监测
- STBSD(Steering Blind Spot Detection)转向盲区监测
- RTCA(Rear Traffic Cross Alert)后方交通穿行提示
- FTCA(Front Traffic Cross Alert)前方交通穿行提示
- DOW(Door Open Warning)车门开启预警
- RCA(Reversing Condition Assist)倒车辅助
- MALSO(Maneuvering Aid For Low Speed Operation)低速行车辅助
B、控制辅助
第二大类为CA(Control Assist)控制辅助类功能,共15项,相对于第一类的区别在于这一类功能会在特定情况下介入车辆驾驶行为的控制。

这一类功能同样可以按照控制行为的差异进一步细分为四类:
第一类紧急应对类
主要是紧急情况下车辆会执行减速、制动、转向等动作以避免碰撞或其它危险行为。
其中前两个AEB和EBA从字面上来看非常近似,具体的区别可以看其功能的详细定义;
AEB自动紧急制动:实时监测前方行驶环境,并在可能发生碰撞危险时自动启动车辆制动系统使车辆减速,以避免碰撞或减轻碰撞后果;
EBA紧急制动辅助:实时监测车辆前方行驶环境,在可能发生碰撞危险时提前采取措施以减少制动响应时间并在驾驶员采取制动操作时辅助增加制动压力,以避免碰撞或减轻碰撞后果;
这样看就明白了,第一个是危险情况下自动触发制动功能的;第二个是危险情况辅助减少人制动介入时间同时加强制动效果;第一个重点在自动上,第二个重点在辅助上,同时大家需要注意,这个功能是避免或减轻碰撞,不要以身试功能。
另AES和ESA的区别也可以参照以上两个功能的区别来理解。

第二类为驾驶便利类
通过辅助功能实现限速、泊车、巡航、拥堵路况、误踩等使用场景的便利,同时也部分的提升了驾驶安全性。

第三类是车道保持类
严格来讲也属于驾驶便利,但是都属于车道控制这个小类别,所以单独拎出来,很容易理解其功能。

第四类是智能灯光类
随着车辆智能化的不断深入,车灯相关的技术也不断的衍生出来,自适应的远光灯和前照灯就属于车灯类的辅助驾驶功能。
另外提一句,目前更先进的ISD(智能交互灯)、DLP(数字信号灯)技术也已经出现了,似乎灯光能够实现一部分过往屏幕才能胜任的信息传递和交互功能了。

作者:箩筐技术
链接:https://www.zhihu.com/question/419176306/answer/2401611862
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
CA控制辅助类整体列表
(Control Assist)
- AEB(Automatic Emergency Braking)自动紧急制动
- EBA(Emergency Braking Assist)紧急制动辅助
- AES(Automatic Emergency Steering)自动紧急转向
- ESA(Emergency Steering Assist)紧急转向辅助
- ISLC(Intelligent Speed Limit Control)智能限速控制
- LKA(Lane Keeping Assist)车道保持辅助
- LCC(Lane Centering Control)车道居中控制
- LDP(Lane Departure Prevention)车道偏离抑制
- IPA(Intelligent Parking Assist)智能泊车辅助
- ACC(Adaptive Cruise Control)自适应巡航控制
- FSRA(Full Speed Range Adaptive Cruise Control)全速自适应巡航
- TJA(Traffic Jam Assist)交通拥堵辅助
- AMAP (Anti-maloperation for Accelerator Pedal)加速踏板防误踩
- ADB(Adaptive Driving Beam)自适应远光灯
- AFL(Adaptive Front Light)自适应前照灯
4、ADAS八大分系统详解
仔细研究,ADAS包含许多不同的技术,例如:ACC自适应巡航,AEB自动紧急制动,TSR / TSI交通标志识别,BSD / BLIS盲点检测,LCA / LCMA车道变更辅助,LDW车道偏离提前警告。下面我们就详细解读一下。
1、车道偏离预警系统+车道保持
该系统由摄像机,传感器和控制器组成。原理是在车身侧面或后视镜中使用摄像头对当前行驶车道的标记线进行采样,然后通过图像处理获得车道中的当前汽车位置。当汽车偏离车道时,控制器将发出警告信号。从感应到发出警告,该过程只需约0.5秒即可实时提醒和唤醒驾驶员,以免发生事故。

2、预碰撞系统+紧急制动系统
雷达摄像头和其他安装在汽车上的传感器可检测自身的速度以及前方车辆的距离和速度。开始时,将发出警告声以提醒驾驶员注意距离。如果驾驶员不响应,距离继续变窄则将施加制动。该系统将进行干预以提供一定的制动效果以防止碰撞。


3、盲点监控系统
汽车驾驶员的盲区是指在后视镜的左右两侧以及内侧不可见的区域。我相信许多驾驶员对盲点印象深刻。这也是许多事故中的常见事故之一。盲点检测系统使用雷达和传感器检测车辆后方的盲点。当盲点检测到车辆驶近时,它将向驾驶员发出警告,以帮助驾驶员将发生事故的可能性降到最低。


4、自动泊车系统

APA自动停车系统使用红外线或传感器检测汽车周围的物体。这些传感器将发出信号。当信号撞到车身周围的障碍物时,它们会反射回来。车载计算机将利用接收信号所花费的时间来确定障碍物的位置,然后计算机系统将接管方向盘,计算机将通过助力转向系统转动方向盘,将汽车完全倾倒到停车位中。

5、自适应巡航系统
ACC自适应巡航系统主要使用安装在车辆前方的距离传感器连续扫描车辆前方的道路,以了解前方车辆的速度和相对距离。它将在行驶时自动检测车辆的速度,相应地调整自己的速度,以与前方车辆保持安全距离,以减少发生碰撞事故的可能性。


6、驾驶员疲劳监测系统
当前大多数系统使用摄像头检测驾驶员的面部,以确定注意力集中程度以及是否有打磕睡的迹象。一些系统使用驾驶员的眼睛睁开和闭合的频率来识别安全等级并提供适当的警告,或协助行动。如果驾驶员的面部表情变化不大,甚至闭上眼睛,车辆将通过声音和灯光警告车主,以减少事故发生。

7、自适应照明控制
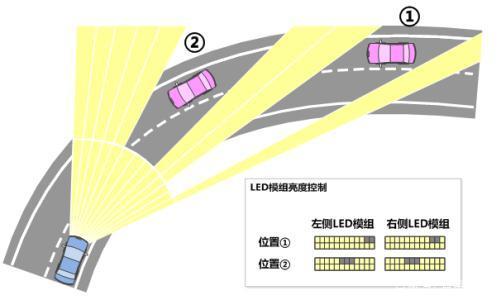
该系统可以根据不同的路况、环境、车速和天气情况自动调节照明灯的照明范围和角度,使照明灯的照明范围更深而不影响其他路人的视线,从而提供驾驶员迎面而来的汽车更安全,更舒适的照明。

8、夜视系统
它可以帮助驾驶员在视线不清或天气不好的夜晚,自动识别障碍物或大型异物,同时警告驾驶员前方的路况,以免发生事故。识别方法是使用红外线感知热的差异,区分人,动物,车辆和环境之间的差异,并在经过处理后将其转换为图像,从而将原始不清晰的物体清晰地呈现在驾驶员的眼前,以减少驾驶风险。

每个ADAS系统主要包括三个层级:
首先是传感层。即信息收集。不同的系统需要使用不同类型的车辆传感器(包括摄像头,雷达等)来收集车辆的运行状态和周围环境的变化,并将其及时反馈给控制单元。
第二,控制层。对传感器收集到的信息进行分析和处理,然后将控制信号输出到受控设备。
第三,执行层。根据行程计算机输出的信号,让汽车完成指定的动作。
三、四种主流 AR HUD成像方案TFT
1.TFT
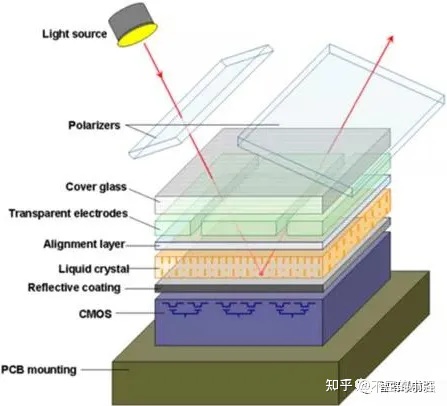
TFT是TFT-LCD的简写,这种方案是目前HUD行业最常见,技术最成熟的投影技术。其原理是LED发出的光透过液晶单元后将屏幕上的信息投射出去。
薄膜晶体管液晶显示器
英语:Thin film transistor liquid crystal display,常简称为TFT-LCD
薄膜晶体管液晶显示器是多数液晶显示器的一种,它使用薄膜晶体管技术改善影象品质。虽然TFT-LCD被统称为LCD,不过它是种主动式矩阵LCD,被应用在电视、平面显示器及投影机上。
简单说,TFT-LCD面板可视为两片玻璃基板中间夹着一层液晶,上层的玻璃基板是彩色滤光片、而下层的玻璃则有晶体管镶嵌于上。当电流通过晶体管产生电场变化,造成液晶分子偏转,藉以改变光线的偏极性,再利用偏光片决定像素的明暗状态。此外,上层玻璃因与彩色滤光片贴合,形成每个像素各包含红蓝绿三颜色,这些发出红蓝绿色彩的像素便构成了面板上的视频画面。

TFT LCD光路:
1、LED灯,2、透镜,3、TFT LCD,4、反射镜1,5、反射镜2,6挡风玻璃,7、眼盒
优点:
方案成熟、成本相对较低
缺点:
1.投影距离变长,解决阳光倒灌难度大
2.光线为偏振光,太阳眼镜问题
3.光效低,产品亮度欠缺。
2.DLP
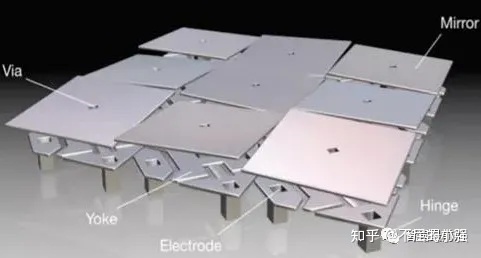
DLP即Digital Light Processing的缩写,采用的是TI的专利产品-DMD芯片(DigitalMicromirror Device,中文意思为数字微型反射镜元件)。DMD由数百万个高反射的铝制独立微型镜片组成,每个镜片可以通过数量庞大的超小型数字光开关控制角度。这些开关可以接受电子讯号代表的资料字节,然后产生光学字节输出。
数字光处理(Digital Light Processing,缩写:DLP)是一项使用在投影仪和背投电视中的显像技术。DLP技术最早是由德州仪器开发的。它至今仍然是此项技术的主要供应商。德国德累斯顿Fraunhofer学院(The Fraunhofer Institute of Dresden)也生产有着特殊用途的数字光处理器,并把它称作空间光调节器(Spatial Light Modulators,SLM)。
例如,瑞典Micronic激光系统公司(Micronic Laser Systems of Sweden)就在其开发的Sigma印版硅模板刻印机中,利用Fraunhofer生产的空间光调节器来生成远紫外线图像。
在DLP投影仪中,图像是由DMD(Digital Micromirror Device,数字微镜器件)产生的。 DMD是在半导体芯片上布置一个由微镜片(精密、微型的反射镜)所组成的矩阵,每一个微镜片控制投影画面中的一个像素。微镜片的数量与投影画面的分辨率相符,800×600、1024×768、1280×720和1920 x 1080(HDTV)是一些常见的DMD的尺寸。
这些微镜片在数字驱动信号的控制下能够迅速改变角度,一旦接收到相应信号,微镜片就会倾斜10°,从而使入射光的反射方向改变。处于投影状态的微镜片被示为“开”,并随数字信号而倾斜+10°;如果微镜片处于非投影状态,则被示为“关”,并倾斜-10°。与此同时,“开”状态下被反射出去的入射光通过投影透镜将影像投影到屏幕上;而“关”状态下反射在微镜片上的入射光被光吸收器吸收。 [1-2]
本质上来说,微镜片的角度只有两种状态:“开”和“关”。微镜片在两种状态间切换的频率是可以变化的,这使得DMD反射出的光线呈现出黑(微镜片处于“关”状态)与白(微镜片处于“开”状态)之间的各种灰度。DLP投影仪主要通过两种方法来产生彩色图像,这两种方法分别被用在单片DLP投影仪和三片DLP投影仪中。


DLP 影像源结构原理图
优点:
- 相较于TFT,DLP更容易获得高亮度,TI官网的介绍是大于15K cd/m2 ,此外DLP在不同温度下也可以保持一致的图像质量
- 由于DLP本身材质以及结构方面的优势,能更好的应对太阳光倒灌问题。
- DLP不使用偏振光,因此即使戴着太阳镜也能看到显示内容
- 支持光波导和全息的AR HUD设计
缺点:
- 成本相对较高,但TI已开发出低成本的车规级产品
- 为德州仪器TI专利产品,供应商只有一家

3.LCOS
LCoS(Liquid Crystal on Silicon),翻译过来叫液晶附硅,也叫硅基液晶,是一种基于反射模式,尺寸比较小的矩阵液晶显示装置。这种矩阵采用CMOS技术在硅芯片上加工制作而成。它属于新型的反射式micro LCD投影技术。
优点:
- 分辨率高,DLP能做到1920×1080的真实分辨率,而LCoS则能够做到4k甚至8k的真实分辨率。
- 体积小,0.69英寸的LCoS已经可以对标3.1英寸的TFT
- 成本合适
- 芯片供应商相较于DLP更多,交期与降本可能性更高。此外更重要的是芯片可国产化替代
- 更低的功耗
缺点:
- 光源是偏振光,太阳眼镜问题
- LED光源时,光效较低,因此亮度不够。后续需要采用激光光源,而激光光源目前车规级厂商少,且价格贵
- 散斑问题
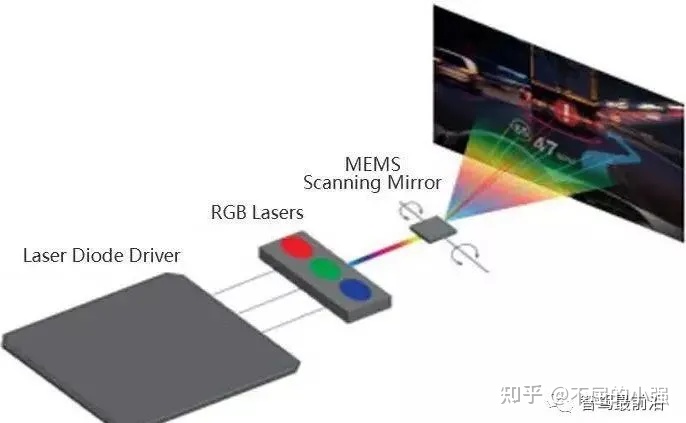
4.LBS-MEMS激光投影
LBS即Laser Beam Scanning缩写,是 “MEMS微激光投影”方案。这种方案是将RGB三基色激光模组与微机电系统(Micro-Electro-MechanicalSystems,MEMS)结合的投影显示技术方案。从驱动的角度来说,MEMS微激光投影属于扫描式投影显示,应用微机电二维微型扫描振镜及RGB三基色激光,以激光扫描的方式成像,其输出分辨率取决于MEMS微镜的扫描频率。
MEMS微激光投影设备结构图

优点:
- 光学引擎大幅度简化,体积可以优化
- 产品对比度高,可以轻松达到7000:1,远超DLP
- 高亮度
- 色域广(>150%),功耗更低(<4-6W),发热量很小
- MEMS激光显示纯黑像素时是可以关掉的,因此更易提高对比度,且零纱窗效应。
MEMS投影原理
缺点:
- 分辨率不高,约720P,提高分辨率需要比较高的成本,但可通过量产降成本。
- 激光二极管对温度较敏感,实现车规级还有困难需克服。目前激光光源仅有日亚较为成熟
5.几种成像方式对比