目录
一、分类
按数据传输方式:
1、串行通信:数据按位顺序传输;
2、并行通信:数据各个位同时传输;
串行通信又按照数据传送方向可以分为:
1、单工:
2、半双工:
3、全双工:
串行通信按照通信方式可以分为:
1、同步通信:
2、异步通信:
二、几种常见的通信方式
1、SPI - 同步全双工串行
2、IIC - 同步半双工串行
3、UART - 异步全双工串行
4、CAN - 异步半双工串行
5、USB - 半双工同步串行
6、并行通信
一、分类
按数据传输方式:
1、串行通信:数据按位顺序传输;
优点:占用引脚资源少;
缺点:速度相对较慢;
2、并行通信:数据各个位同时传输;
优点:速度快;
缺点:占用引脚资源多;
适用场景:适合于外部设备与微机之间进行近距离、大量和快速的信息交换;
串行通信又按照数据传送方向可以分为:
1、单工:
数据传输只支持数据在一个方向上传输;
2、半双工:
允许数据在两个方向上传输,但是在某一个时刻只需要数据在一个方向上传输,实际上相当于一种切换方向的单工通信;
3、全双工:
允许数据同时在两个方向上传输,因此全双工通信是两个单工通信方式的结合,要求发送设备和接收设备都有独立的接受和发送能力;
串行通信按照通信方式可以分为:
1、同步通信:
带时钟同步信号传输;
2、异步通信:
不带时钟同步信号;
二、几种常见的通信方式
SPI:全双工同步串行通信
IIC:半双工同步串行通信
UART:全双工异步串行通信
CAN:半双工异步串行通信
USB:半双工同步串行通信
并行通信:微机与并行接口打印机、磁盘驱动器、系统板上各部件之间,接口电路板上各部件之间;
1、SPI - 同步全双工串行
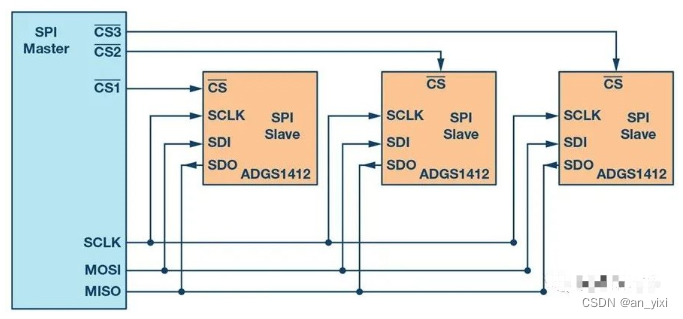
①优点:通信简单、数据传输速率快;
②缺点:没有指定的流控制,没有应答机制确认是否接收到数据;
③从设备信号线:SDI(串行数据输入)、SDO(串行数据输出)、SCLK(时钟)、CS(片选);
④主设备信号线:SDO/MOSI(主设备数据输出,从设备数据输入)、SDI/MISO(主设备数据输入,从设备数据输出)、SCLK(时钟信号,由主设备产生)、CS/SS(片选,从设备使能信号,由主设备控制,一般为拉低有效);
2、IIC - 同步半双工串行
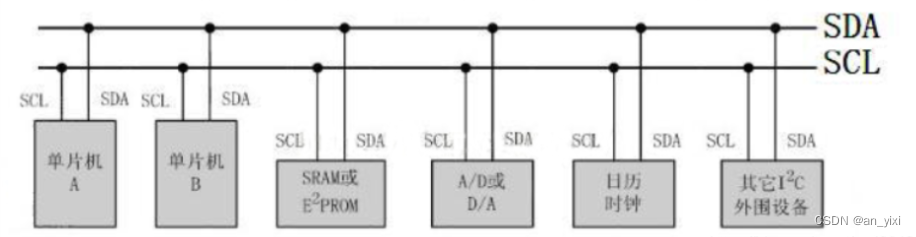
①优点:硬件资源节约,协议设计精巧,使用广泛且易移植;
②缺点:传输速率较慢;
③信号线:一根是双向的数据线SDA,一根是时钟线SCL,两根线可以挂多个设备,主设备控制时钟线,通过传输对应的设备地址来使能对应的设备;
3、UART - 异步全双工串行
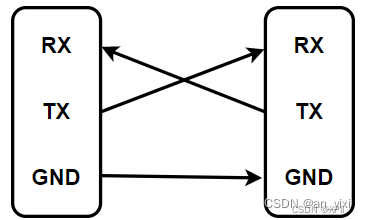
①优点:只需两根数据线;无需时钟信号;有奇偶校验位,可以检查;通信稳定
②缺点:效率较低;抗干扰性弱;传输距离有限
4、CAN - 异步半双工串行
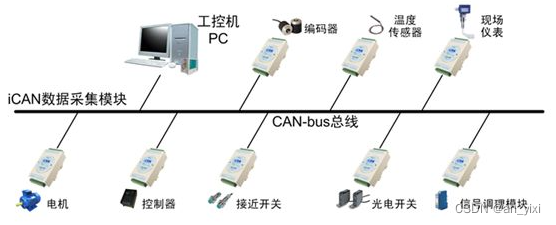
①优点:实时性强;传输距离较远;抗电磁干扰能力强;成本低;检错能力强,可在高噪声干扰环境中工作;具有优先权和仲裁功能;多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;可根据报文的ID决定接收或屏蔽该报文;
②缺点:信道出错堵塞;不一致性;不可预测性;
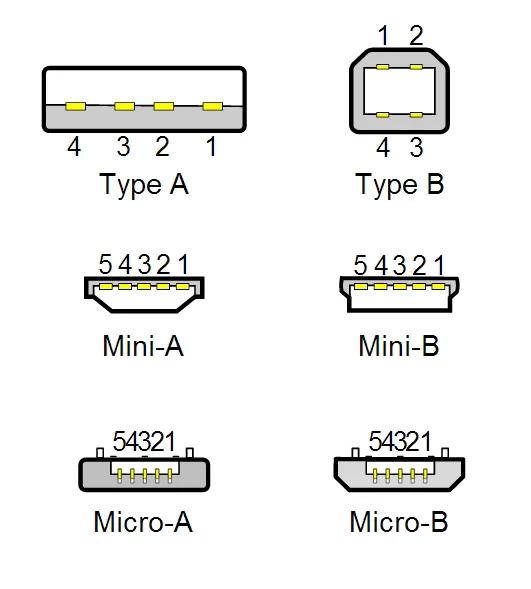
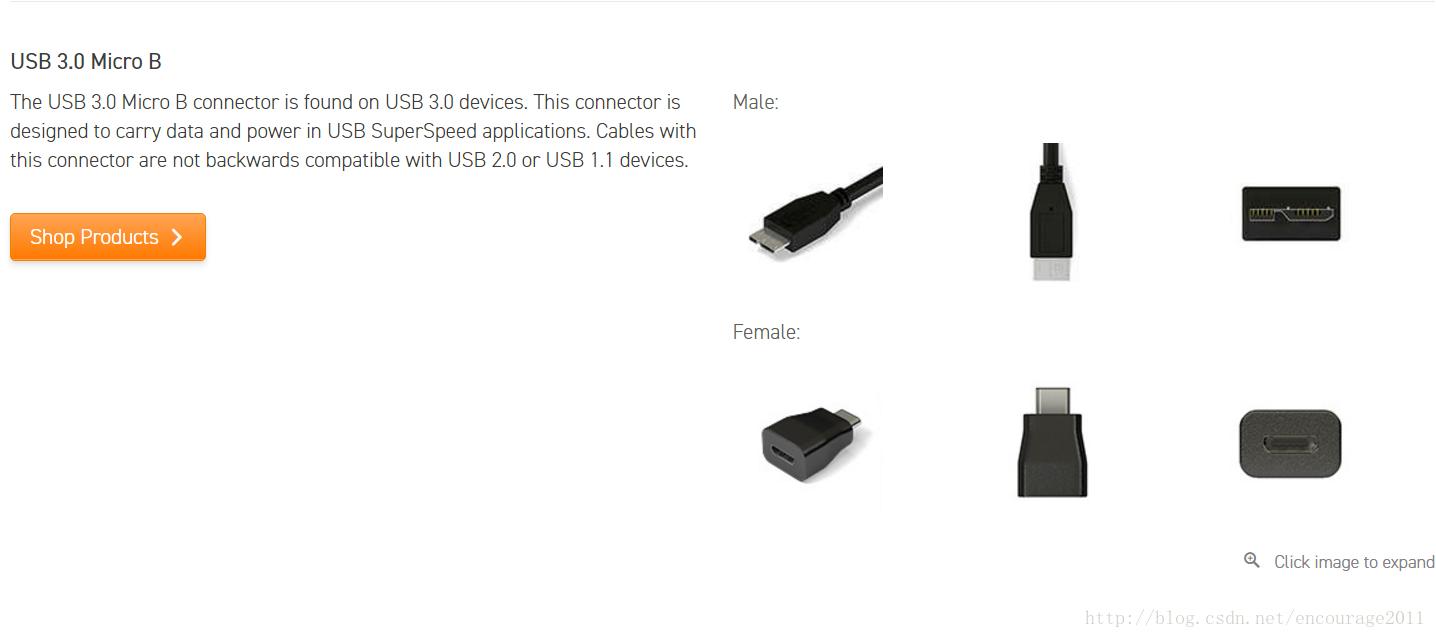
5、USB - 半双工同步串行
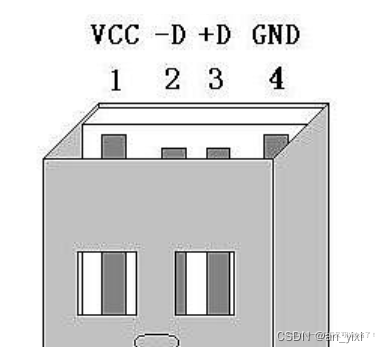
①优点:可以热拔插(数据线比供电线短);传输速度快;使用方便;连接灵活;独立供电;
②缺点:传输距离短;开发调试难度大;
③信号线:两根供电线、两根差分传输数据;D+是数据正信号线,D-是数据负信号线,VCC电源线,GND地线;
6、并行通信
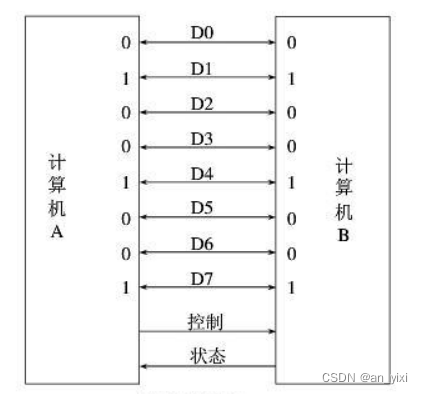
多条数据线将一个数据的各个位同时传输;