文章目录
- 前言
- 一、飞控LED灯光控制
- 二、飞控路径控制
- 三、飞控和地面站通信接口
- 四、舞步设计
- 五、gazebo仿真
前言
编队灯光表演没有什么高深的技术,主要是一些应用层的开发,事实上即使没有任何编程基础,按本教程操作也可以实现。
硬件准备:
pixhawk2.4.8
四轴无人机
Zigbee数传
一台电脑或安卓手机
软件准备:
APM4.3.6(飞控)
QGC 4.2.4 (地面站)
Blender 3.5 (舞步设计)
无人机编队表演的流程如下:
舞步(灯光)设计->导出路径文件->地面站导入路径文件->通过mavlink将航点发给飞控->飞控执行航点(灯光)
基于以上流程本系列文章将从包含一下几个方面的内容
本教程将尽可能详细,即便你没有任何编程经验,也能实现自己的编队表现系统
下面将会以下述述顺序开始写博客,感兴趣的朋友可以关注我的b站,会同步更新相关的教学与展示视频,今天是6.19号,我将尽量在一个月内完成这篇博客
ROS+PX4学习与开发 2.9无人机跟随
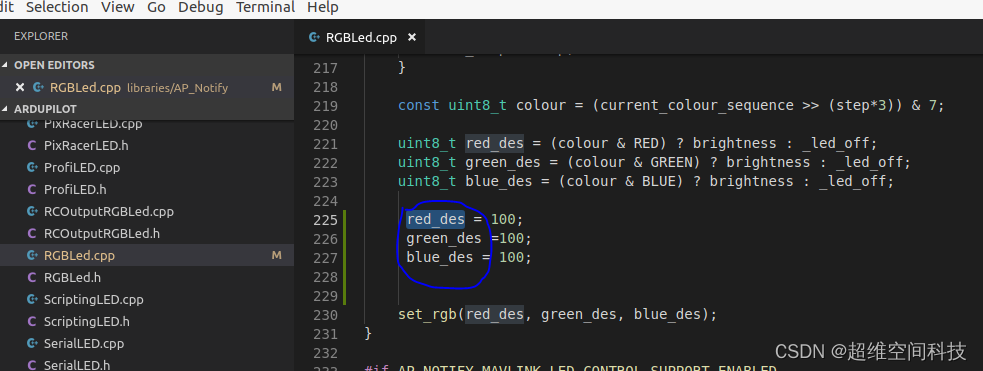
一、飞控LED灯光控制
这个直接修改APM就可以,比较简单
直接在下面函数中赋值RGB的数值就可以,实际的数值要根据航点文件来
二、飞控路径控制
这个通过自定义一个飞行模式来实现,APM官方有相应的教程,也比较简单
三、飞控和地面站通信接口
事实上这里主要是传输航点和灯光颜色信息,好在飞控里面本身就是航点的传输接口,不过也要作少量的修改。这个地方涉及地面站读取舞步文件并发送给飞控底层。
四、舞步设计
这个就使用三维动画软件blender设计就可以,也比较简单
五、gazebo仿真
经过前面四步,编队的设计就基本完成了,但是在实际飞行之前,最好先进行仿真