/*
PID的参数设置可以参照以下来进行:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1 ;
一看二调多分析,调节质量不会低;
*/
proteus仿真:
PID细节程序:
void PIDControl() //pid偏差计算
{e=SpeedSet-num;duk=(Kp*(e-e1)+Ki*e+Kd*(e-2*e1+e2)); uk=uk1+duk;out=(int)uk;if(out>1000){out=1000;}else if(out<0){out=0;}uk1=uk;e2=e1;e1=e;PWMTime=out;
}
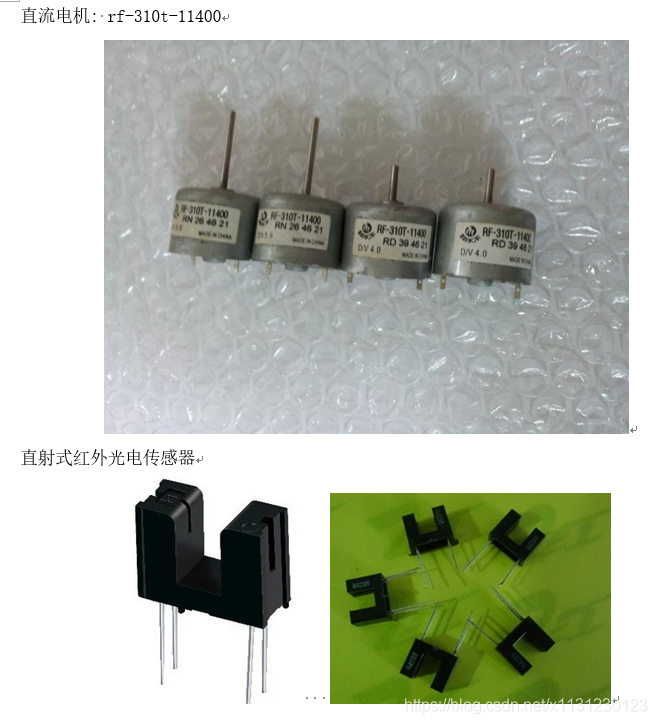
原理图:

原件清单: