1、调试特性概述
单片机的调试功能在程序开发中有着十分重要的地位,好的调试工具,能让程序开发大大加快。笔者在刚开始学单片机相关知识时,使用的是pintf打印相关参数,进行调试(虽然现在很多时候也这样),但这种方式是效率十分低下的。
使用JTAG接口,可以使用相关调试工具链,如MDK相关工具链,对代码使用断点(F10、F11)、观察寄存器、内存、监视变量等,可以很方便的调试代码。尤其是在代码非常复杂的时候,只能使用调试来追踪。M3内核提供了不少调试工具,大体上分为两类:侵入式调试、非侵入式调试。
1.1 侵入式调试
a、停机以及单步执行程序
b、硬件断点
c、断点指令(BKPT)
d、数据观察点,作用于单一地址、一个范围的地址,以及数据的值。
e、访问寄存器的值(既包括读,也包括写)
f、调试监视器异常
g、基于ROM的调试(闪存地址重载(flash patching))
1.2 非侵入式调试
a、在内核运行的时候访问存储器
b、指令跟踪,需要通过可选的嵌入式跟踪宏单元(ETM)
c、数据跟踪
d、软件跟踪(通过ITM(指令跟踪单元))
e、性能速写(profiling)(通过数据观察点以及跟踪模块)
平常我们接触多的是侵入式调试,这种调试会打断程序的正常运行。在使用RTOS这种多任务时,非侵入式跟踪就有了用武之地。
CM3处理器的内部,包含了一系列的调试组件。CM3的调试系统基于ARM的“CoreSight(内核景象)”调试架构。该架构是一个专业设计的体系,它允许使用标准的方案来访问调试组件,收集跟踪信息,以及检测调试系统的配置。
2、CoreSight技术概览
CoreSight调试架构的定义简直包罗万象,包括调试接口协议、调试总线协议、对调试组件的控制、安全特性、跟踪接口等。在《CoreSight Technology System Design Guide(Ref3)》中,对CoreSight有详细的讲述,此外,在Cortex-M3 TRM中也开出了若干章,专门叙述CM3中调试组件的设计。但是这些内容通常只是给设计调试软件的人看的,我们软硬件开发者不要陷得太深。不过,懂一点调试系统的组成结构和基本工作原理,还是很有助于让我们善加利用这强大无比的调试系统,大幅加速程序的开发的。
2.1 处理器的调试接口
CM3的调试系统基于新好CoreSight架构,对处理器上总线逻辑的控制使用另外的总线接口,即通过所谓的“调试访问端口(DAP)”。DAP与AMBA中的APB很相似。在CM3中,把JTAG或串行线协议都转换成DAP总线接口协议,再控制DAP来执行调试动作。
CM3内部的调试总线DAP是APB的近亲,所以很容易在它上面挂上很多调试组件,从而使得调试系统可大可小,伸缩性极强。此外,把调试接口和调试硬件分开,也是颇具匠心的:芯片中实际使用的调试接口类型变得透明化。从而不管使用了什么样的调试接口,相同的调试任务都可以按照同一个方式执行。
在CM3处理器内核中,实际的调试功能由NVIC和若干调试组件来协作完成。调试组件包括FPB,DWT, ITM等。NVIC中有一些寄存器,用于控制内核的调试动作,如停机、单步;其它的一些功能块则控制观察点、断点,以及调试消息的输出等。
就目前来看,CM3支持两种调试主机接口(debug host interface):第一个是广为使用的JTAG接口,另一个则是新的“串行线(Serial Wire, SW)调试接口”。ARM公司还提供了若干种调试主机接口模块(称为“调试接口”(DP))。DP充当处理器与调试器的中介:它的一端连接到调试器上,另一端则连接到CM3的DAP接口上。
选择串行线的理由
CM3主要针对低成本的单片机市场。单片机往往没有很富裕的管脚资源。而JTAG协议需要使用4根脚,而SW则只需要两根。
2.2 DP模块,AP模块和DAP
从外部调试器到CM3调试接口的连接,需要多级互联才能完成,如图所示。第一步,是通过DP接口模块(通常是SWJ-DP或SW-DP),先把外部信号转换成一个通用的32位调试总线信号(图表中的DAP总线)。SWJ-DP支持SW与JTAG两种协议,而SW-DP则只支持SW。另外,在CoreSight产品中还可以使用一种JTAG-DP,它只支持JTAG协议。DAP总线上的地址是32位的,其中高8位用于选择访问哪一个设备,由此可见,最多可以在DAP总线上面挂256个设备。在CM3处理器的内部,只用掉了一个设备的地址,还剩下的255个都可以用于连接访问端口(AP)到DAP总线上。

在把数据从 DAP 接口传递给 CM3 处理器后,下一步就连接到了一个称为“AHB-AP”的 AP 设备上,它相当于一个总线桥,用于把 DAP 总线的命令转换为 AHB 总线上的数据传送,再插入到 CM3内部的总线网络中。这么一来, CM3 的整个寻址空间就都在覆盖范围之内了,连 NVIC 中的调试控制寄存器组也包括在内。在 CoreSight 系列产品中, AP 设备可以有好几种类型,包括 APB-AP 和JTAG-AP。 APB-AP 顾名思义,是用于产生 APB 总线数据传送动作的,而 JTAG-AP 则用于控制传统的、基于 JTAG 的测试接口,例如 ARM7 上的调试接口。
2.3 跟踪接口
CoreSight 架构的另一个部分用于跟踪。在 CM3 中有 3 种跟踪源:
指令跟踪:由 ETM(嵌入式跟踪宏单元)产生
数据跟踪:由 DWT 产生
调试消息:由 ITM 产生,提供形如 printf 的消息输入,送到调试器的 GUI 中
跟踪过程中,由先把跟踪源产生的数据裹成数据包,然后把数据包送到“高级跟踪总线(ATB)” 上进行传送。在 CoreSight 的架构中,如果某 SoC 含有多个跟踪源(例如,多核系统),则需要一 种硬件水平的 ATB 归并器(merger),把各 ATB 数据流归并成一条(在 CoreSight 架构中,这种 硬件被名为 ATB funnel)。归并后的数据流都送往 TPIU(跟踪端口接口单元), TPIU 再把数据导 出到片外的跟踪硬件设备。在数据送到了调试主机(PC)后,再由 PC 端的调试软件还原为先前的 多条数据流。
尽管在 CM3 中拥有多个跟踪源,但 CM3 内建了一个归并硬件,因此不需要再添加 ATB funnel 模块了。跟踪输出接口可以直接连接到专为 CM3 设计的 TPIU 上,然后就可以供 PC 控制的外部硬件 捕捉仪来跟踪数据
2.4 CoreSight 的性质
基于 CoreSight 的调试设计有很多优势:
1.即使在处理器运行时,也可以查看存储器和外设的寄存器的内容
2.使用单一调试器,就可以控制多核系统的调试接口。例如,如果使用 JTAG,则只需要一个TAP 控制器,不管芯片中有几个处理机都一样。
3.内部的调试接口是基于单总线的方式设计的,因此非常有弹性,也简化了为芯片的其它部分设计附加的测试逻辑。
4.它使得多条“跟踪数据流”可以由单一的“跟踪捕获设备”来收集,送到 PC 机上之后再还原出先前的各条数据流
CM3 中的调试系统是基于 CoreSight 的,但是又有一些“变异”:
CM3 的跟踪组件是重新设计的,有些在 CM3 中的 ATB 接口是 8 位的,而纯种的 CoreSight的都是 32 位的。
CM3 的调试系统没有实现 TrustZone——ARM 提供的一种技术,用于在嵌入式产品中提供安全特性。
调试组件所需的空间挤到了系统的存储器映射中。而在标准的 CoreSight 系统中,是为调试总线另开了一个地址空间的。例如,在 CoreSight 系统中,系统连接的概念图如图 所示:
而在 CM3 中,调试设备共享同一个同一个存储器映射,如图 所示 。

Cortex-M3 的调试系统
尽管 CM3 的调试组件在实现上与标准 CoreSight 系统的有些出入,但是通信接口与协议是与CoreSight 架构兼容的,并且可以直接挂接到 CoreSight 系统上,标准 CoreSight 的调试组件也可以挂接到 CM3 上。例如,(标准) CoreSight 调试组件,诸如 TPIU,调试端口以及跟踪基础设施等,可以供 CM3 使用,并且以此来把调试能力延伸到多核调试系统中。关于 CoreSight 架构的更多内容,请参阅《 CoreSight Technology System Design Guide(Ref3)》。
3、调试模式
在CM3中的调试操作模式分为两种。第一种称为“halt”(停机模式),在进入此模式时,处理器完全停止程序的执行。第二种则称为“debug monitor exception”(调试监视器模式),此时处理器执行相应的调试监视器异常服务例程,由它来执行调试任务,并且依然允许更高优先级的异常抢占它。调试监视器的异常号为12,优先级可编程。除了调试事件可以触发异常外,手工设置其悬起位也可以触发本异常。
1 停机模式
指令执行被停止
SysTick定时器停止
支持单步操作
中断可以在这期间悬起,并且可以在单步执行时响应。也可以掩蔽它们,使得单步时不受干扰
2 调试监视器模式
处理器执行调试监视器异常的服务例程(异常号:12)
SysTick定时器继续运行
新来的中断按普通执行时的原则来抢占
执行单步操作
存储器的内容(如堆栈内存)会在调试监视器的响应始末得到更新,因为有自动入栈和出栈的动作
之所以加入调试监视器模式,是考虑到了在某些电子系统运行的过程中,是不可以停机的。例如,对于汽车引擎控制器以及电机控制器,就必须在处理调试动作的同时让处理器继续运行下去,这样才能保证被测试的设备不会意外损坏(例如,不需要在调试过程中让电机停转)。有了调试监视器,就可以停止并调试线程级的应用程序,也可以调试低优先级的中断服务例程。在这同时,高优先级的中断和异常能够响应。
如果要进入停机模式,需要把NVIC调试停机控制及状态寄存器(DHCSR)的C_DEBUGEN位置位。这个位只能由调试器来设置,没有调试器是不能把CM3停机的。在C_DEBUGEN置位后,就可以设置DHCSR.C_HALT位来喊停处理器。此C_HALT位可以由软件置位。
DHCSR的位段定义比较特殊:读时是一种定义,写时又是另外一种定义。对于写操作,必须先往[31:16]中写入一个“访问钥匙”值。而对于读操作,则无此钥匙,并且读回来的高半字包含了状态位,如表所示。

DHCSR中的控制位是在上电复位时得到复位的。系统复位(例如,往NVIC应用程序中断及复位寄存器中写命令)不会影响到它们 。
在正常情况下,只有调试器会操作DHCSR,应用程序不要乱动它,以免使调试工具出现问题。当使用调试监视器模式时,由另一个NVIC中的寄存器来负责控制调试活动,它是NVIC调试异常及监视器控制寄存器(DEMCR),其定义如表所示。

DEMCR中的控制位是在上电复位时得到复位的。系统复位(例如,往NVIC应用程序中断及复位寄存器中写命令)不会影响到它们。
该寄存器不仅包含了调试监视器的控制位,还包含了跟踪系统的使能位(TRCENA)以及若干向量抓捕(Vector Catch, VC)控制位。VC功能只有在停机模式下才能使用。如果某个异常(或者内核复位)发生了,并且对应的VC位置位,则将自行产生一个停机请求,并且在执行完当前指令后立即把处理器喊停。
虽然TRCENA和VC控制相关的位只有上电时才复位,但是其它用于控制监视器模式的位,则也会因系统复位而复位。
4、调试事件
CM3可以由很多种理由进入调试模式(both停机模式和调试监视器模式)。对于停机模式,满足图所示的条件可以喊停处理器。但即使是停机后,也可由上电复位和系统复位来复位处理器。

图中,外部调试请求信号是通过CM3上的一个称为“EDBGREQ”的信号线传来的,该信号线的实际连接方式取决于单片机/SoC的设计。在有些场合下可以把该信号硬线连至低电平,从而使外部调试请求永远无法送达;也可以把它连接到附加的调试组件上(芯片厂商可以添加额外的调试组件);或者在多核系统中,可以用来连接其它处理机的调试事件。在调试活动完成后,通过清除C_HALT位,可以让程序继续执行。
类似地,在调试监视器模式下,也可以由一系列的调试事件来进入调试模式,如图15.5所示。 从图中可见,在调试监视器模式下,与在停机模式下的动作方式还是有一点区别的。这是因为调试监视器异常仅仅是异常的一种,它可以影响当前的优先级,但是不能使处理器停下来。在调试活动完成后,通过该异常的返回,即可回到正常的程序执行中。

5、Cortex-M3中的断点
在大多数单片机中,用得最多的可能就是断点了。在CM3中,有两种断点机制:断点指令、基于FPB地址比较器的断点。
断点指令的格式为BKPT #im8,它是一个16位的Thumb指令,编码为0xBExx——其低8位就是指令中#im8的值。当该指令执行时,会产生一个调试事件。当C_DBGEN置位时可以用于喊停处理器内核;或者当调试监视器使能时,触发调试监视器异常。对于后者,因为调试监视器异常也是一种优先级可编程的普通异常,所以也可以因为其优先级不够高而不能立即响应。可见,因为NMI和硬fault的优先级总是比它的高,所以不能在它们的服务例程中使用BKPT指令来启动调试——只有在它们返回时才能响应调试监视器异常。
使用BKPT时另一个要注意的是,当调试监视器异常返回后,它返回到的是BKPT指令的地址,而不是返回BKPT后面一条指令的地址。这与常规的异常返回是不同的,原因在于,在正常情况下使用BKPT指令时,BKPT用于取代一条正常的指令,并且当命中了该断点而执行了调试动作后,把该BKPT指令所占用的内存恢复为先前被BKPT取代的指令,并且让该指令是下一条即将执行的指令,而其它的部分不受影响(这其实也是软件断点的实现方式)。
如果在BKPT指令执行时却发现C_DEBUGEN和MON_EN都为0,则会因为无法进入调试而上访成硬fault,并且把硬fault状态寄存器(HFSR)的DEBUGEVT位给置1,同时在调试fault状态寄存器(DFSR)中的BKPT位也置1。
如果程序存储器的值不能更改,则可以通过编程FPB来产生硬件断点。但是,只支持6个指令地址和两个文字地址。
使用BKPT指令取代正常指令,以及对FPB的编程,通常都是在我们设置断点时,由调试器负责做的事。
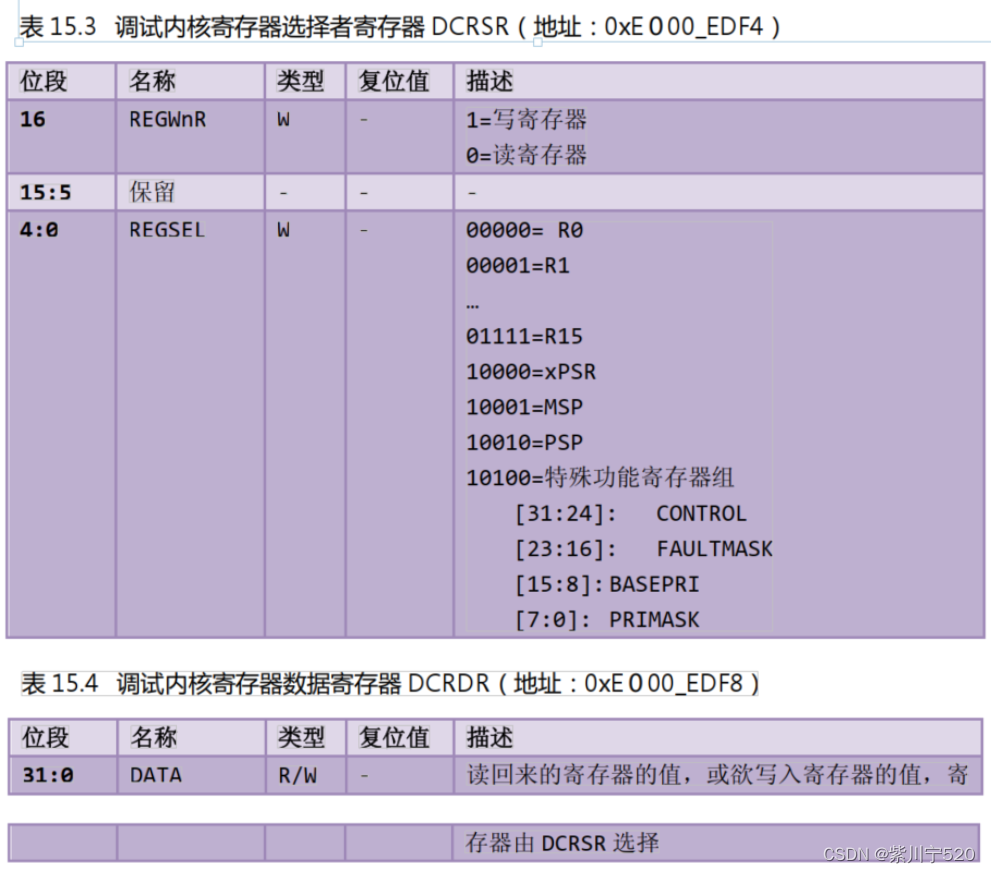
6、调试时访问寄存器
在NVIC中,还有两个寄存器与与调试功能有关。它们分别是:调试内核寄存器选择者寄存器(DCRSR),以及调试内核寄存器数据寄存器(DCRDR),如表15.3和表15.4所示。调试器需要通过这两个寄存器来访问处理器的寄存器,并且只有在处理器停机时,才能使用这里的寄存器传送功能。
欲使用这两个寄存器来读取内核的寄存器的内容,则必须按如下的顺序做:
1、确定处理器已停机
2、往DCRSR写数据,其中位16要为0,表示这是要读数据
3、查询,直到DHCSR.S_REGRDY=1
4.读取DCRDR以获取寄存器的内容
寄存器写操作的顺序与上面的类似:
1、确定处理器已停机
2、往DCRDR中写数据
3、往DCRSR写数据,其中位16要为1,表示这是要写数据
4、查询,直到DHCSR.S_REGRDY=1
使用DCRSR和DCRDR来访问寄存器,只适用于停机模式。如果选择了调试监视器模式,则对于自动入栈的寄存器,可以从堆栈中读写它们;对于其它寄存器,就可以直接在服务例程中访问。
如果有合适的函数库和调试器的支持,还可以使用DCRDR来做半主机(semihosting)。比如说,当应用程序执行了printf语句时,文字的输出可以通过一系列的putc()调用来完成。在实现putc()时,可以让它把输出的字符和状态写到DCRDR中,然后触发调试模式。接下来,调试器可以检测到内核停机状态,并且读取被输出的字符。然而,这种形式的半主机需要喊停内核。更正点的半主机是使用ITM,它则没有此限制。
7、 内核的其它调试特性
在NVIC中,还有其它一些与调试有关的特性,它们包括:
1、外部调试请求信号**:** NVIC提供了一个外部调试请求信号,通过它可以让CM3处理器由外部调试事件触发而进入调试模式。举一个外部调试事件的例子:在多核系统中,可以是其它处理机的调试状态,这对于调试多核系统的意义决非等闲。如果是单核的单片机,则基本上是把该信号拉低。
2、调试fault状态寄存器:因为在CM3上有多种调试事件,故而设置了一个DFSR,以资调试器来判断是发生了哪种调试事件。
3、复位控制:在调试期间,可以使用VECTRESET控制位来重启处理器内核(位于NVIC应用程序中断及复位控制寄存器中(地址: 0xE000_ED0C))。通过使用这种方式,可以不让处理器的复位波及到调试系统。
4、中断掩蔽:在单步时这个功能是非常体贴的。因为在单步时,往往是为了集中精力分析某段代码的逻辑,此时不希望受到任何骚扰,哪怕是响应中断也是很讨人厌的事。通过置位C_MASKINTS位(在调试停机控制及状态寄存器中,(地址: 0xE000_EDF0)),就可以在单步期间掩蔽中断。
5、终止Stalled总线传送:如果一个总线传送被stall了一个很长的时间,就可以强制终结它。在调试停机及状态寄存器中有一个C_SNAPSTALL位,把它置位即可。但是这个功能只有在停机模式下才能由调试器使用。





