0.效果演示
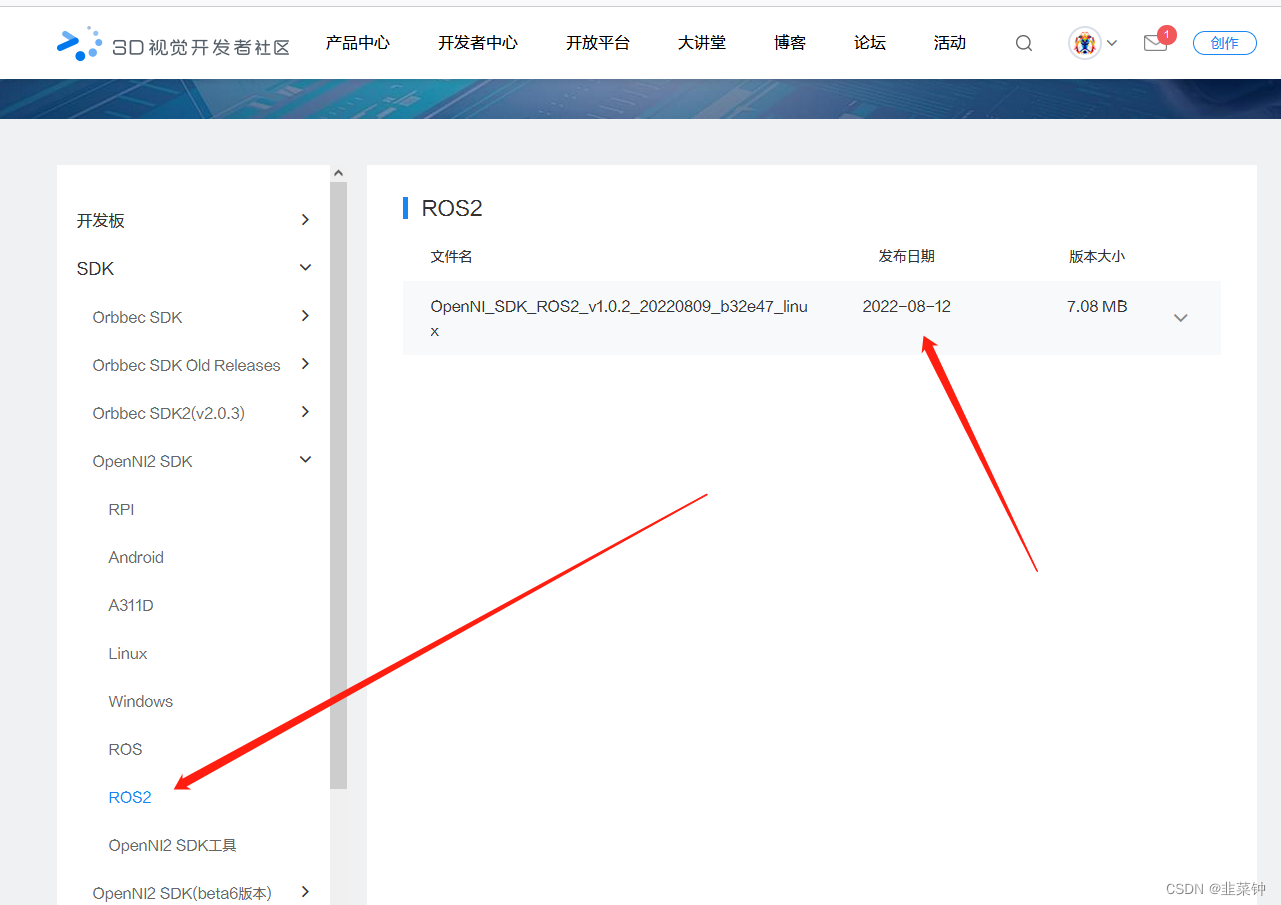
1.下载SDK
到官网下载OpenNI2_SDK
记得是下载这个OpenNI2_SDK,而不是下载那个Orbbec_SDK.
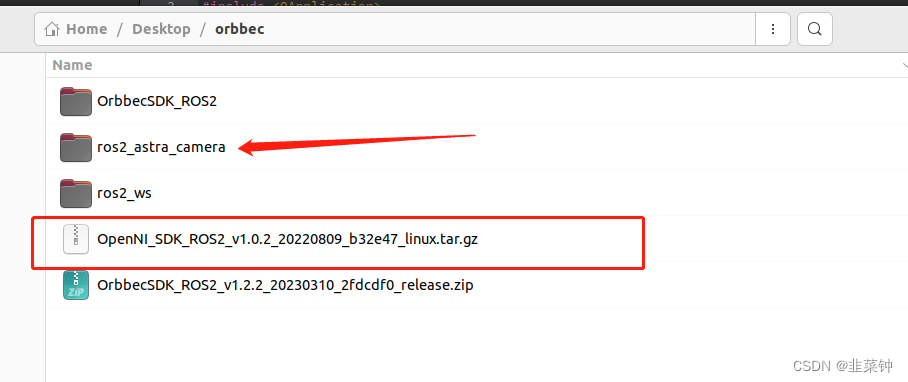
2.拷贝至自定义目录
拷贝到你的ubuntu的一个文件夹中,并解压得到 ros2_astra_camera 文件夹
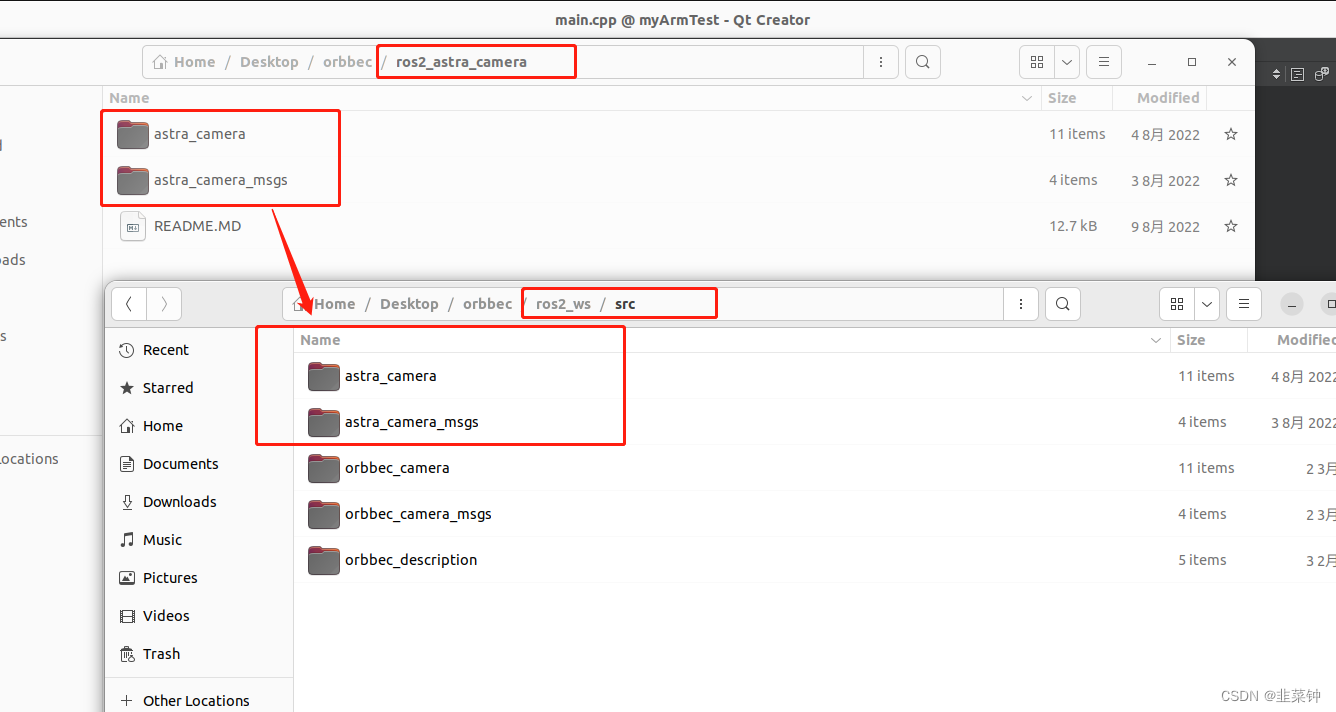
然后新建一个ros2_ws文件夹,再在ros2_ws文件夹中新建src文件夹,然后复制 ros2_astra_camera文件夹里面的astra_camera、astra_camera_msg两个文件夹到src里面
3.安装各种库
然后根据 ros2_astra_camera里面的README.MD,来安装好各种库:
● Install dependencies
● Install glog
● Install magic_enum
● Install libuvc
在安装过程中,假如git clone或者wget 失败。可以自己搭梯子下载好源码然后再放到一个文件夹中再编译安装
4.编译项目
安装好上面的库之后,在orbbec中打开终端,并执行以下命令:
cd ros2_ws/src/astra_camera/scripts
sudo bash install.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
cd ../../../
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
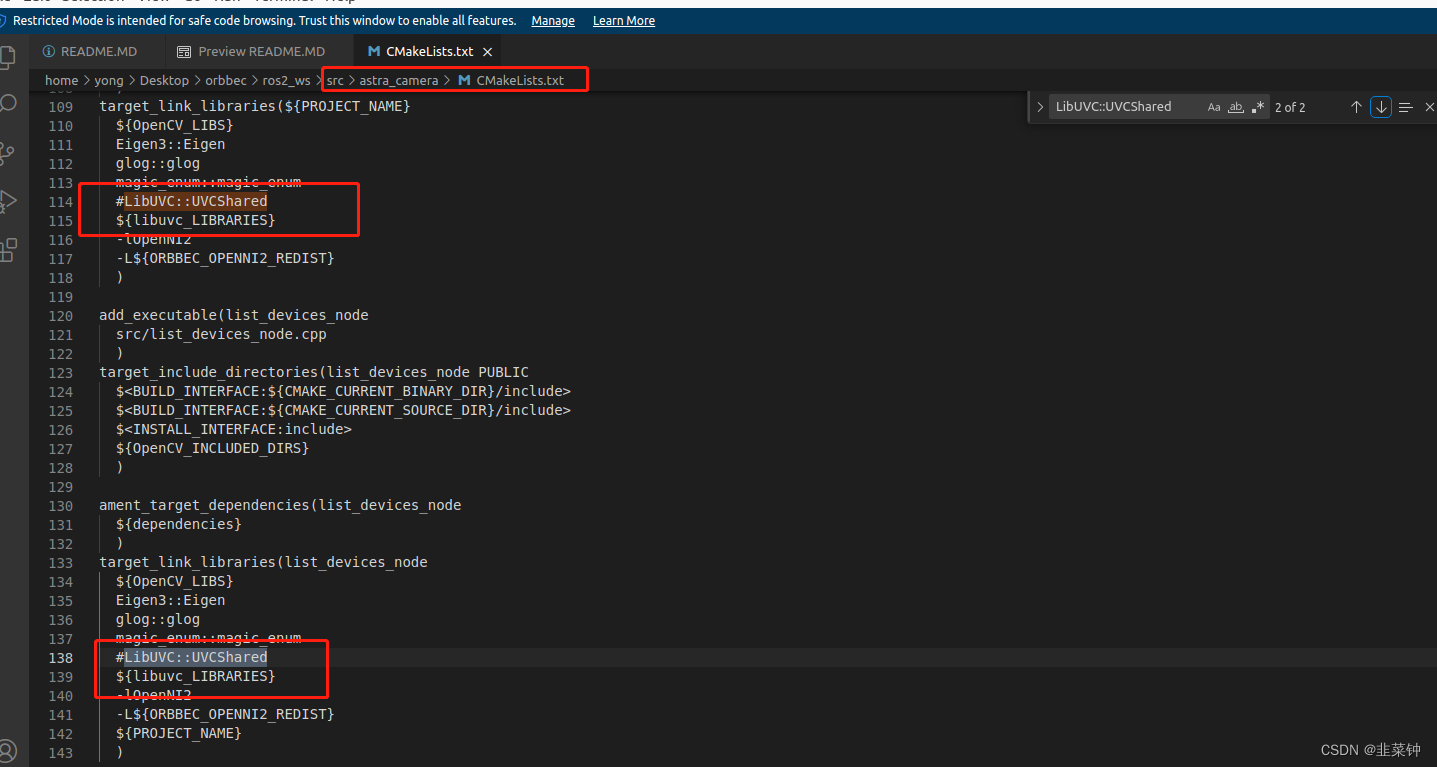
在编译过程中,可能会出现 LibUVC::UVCShared 的问题。
参考这里修正
5.启动相机节点
执行以下命令,启动相机节点
source install/setup.bash
ros2 launch astra_camera astra_mini.launch.py
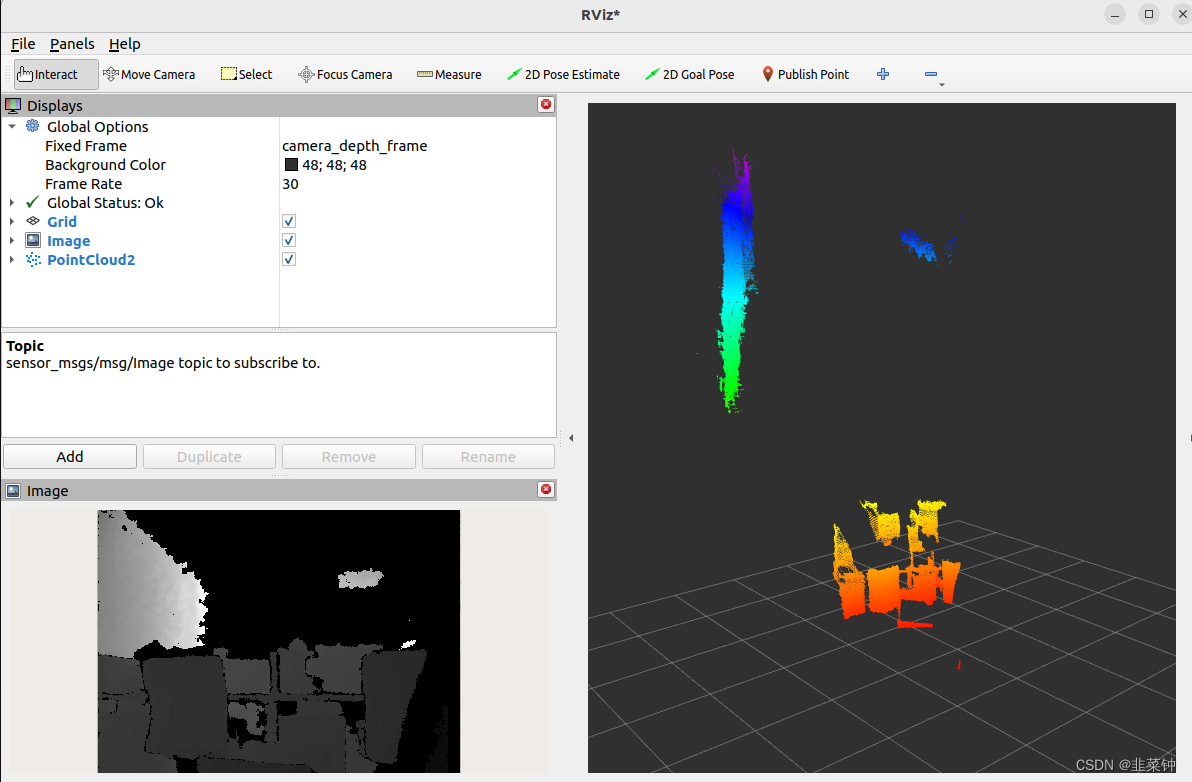
6.启动rviz2
在一个新的控制台中启动rviz2
rviz2
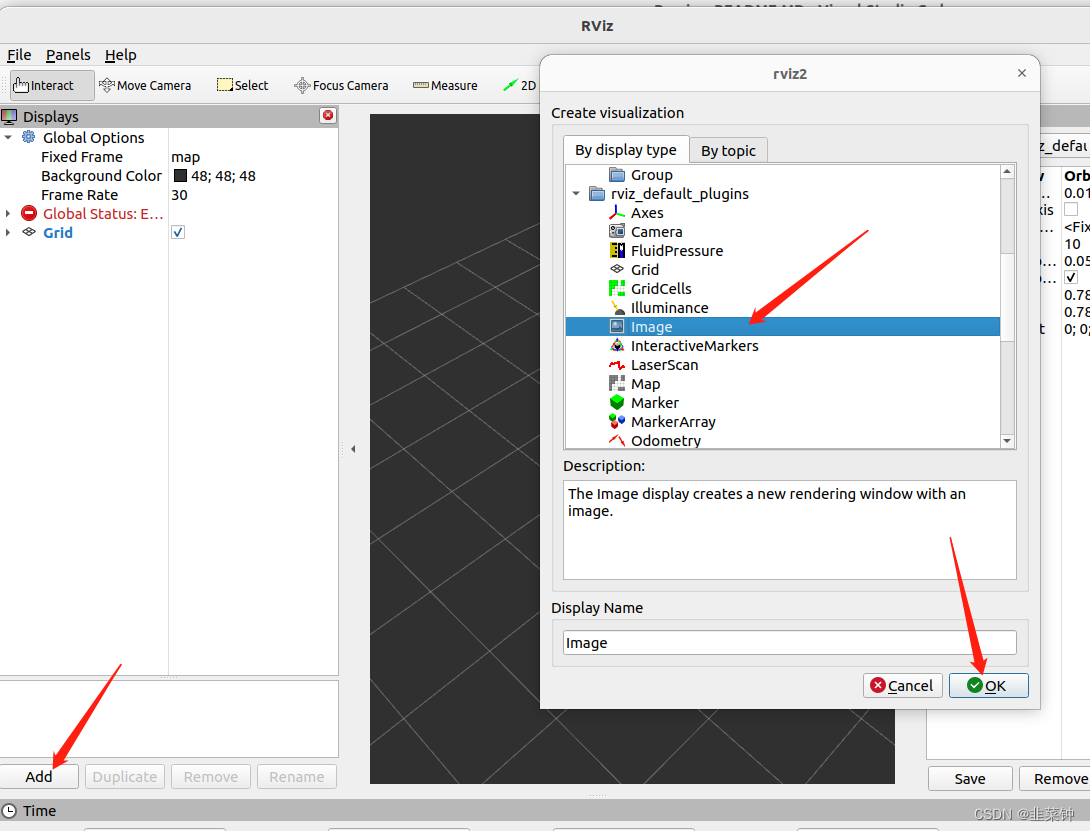
6.1显示深度图
添加一个图像控件
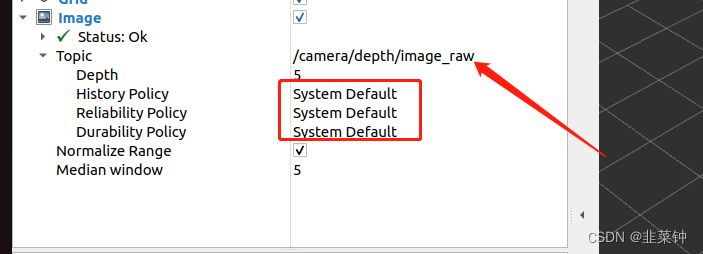
 选择好话题,并设置好qos的参数。
选择好话题,并设置好qos的参数。
然后就可以看到深度图了
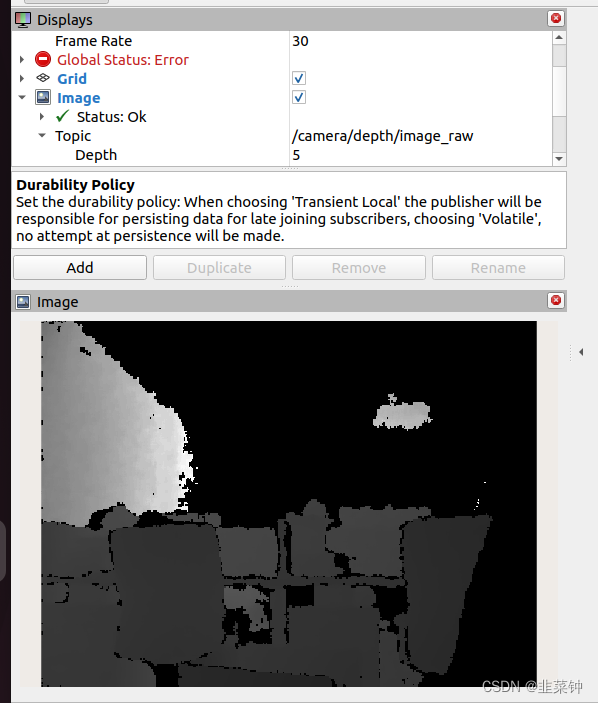
选择红外图(/camera/ir/image_raw)也是可以的,但是彩色图就不行,不知道为啥。
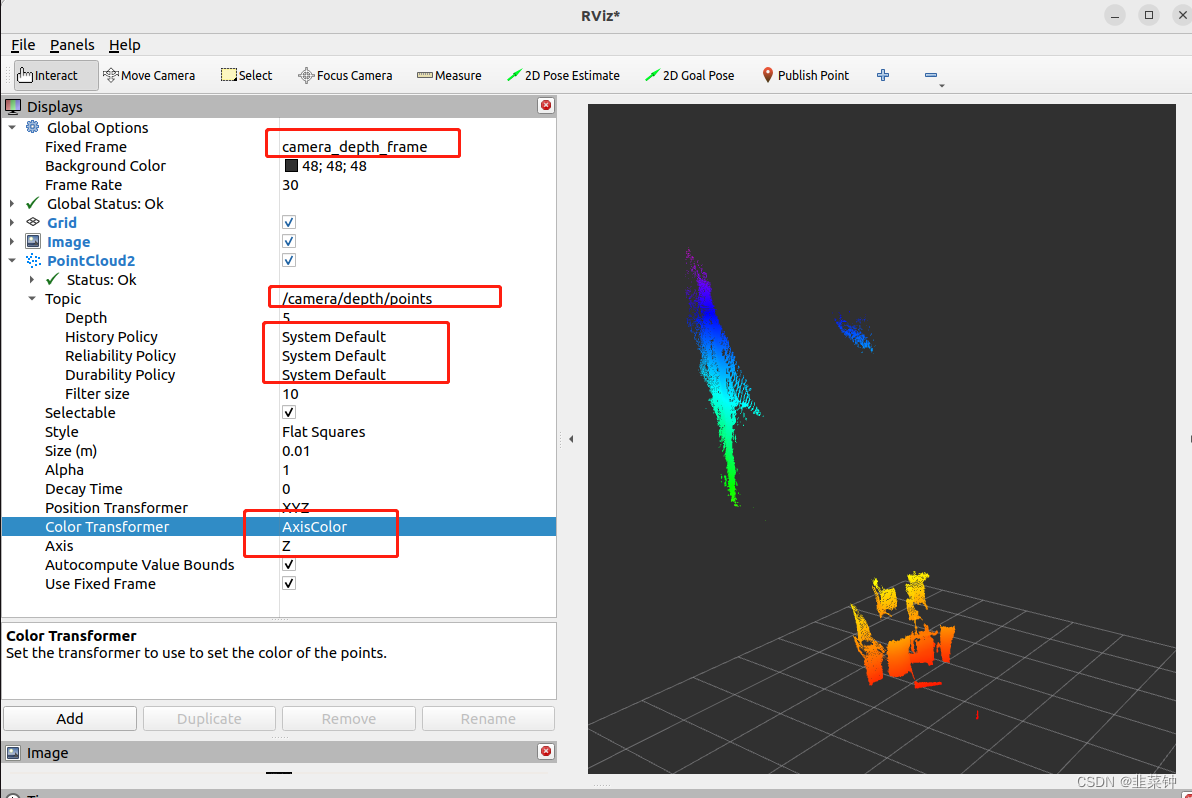
6.2显示点云
再看看点云
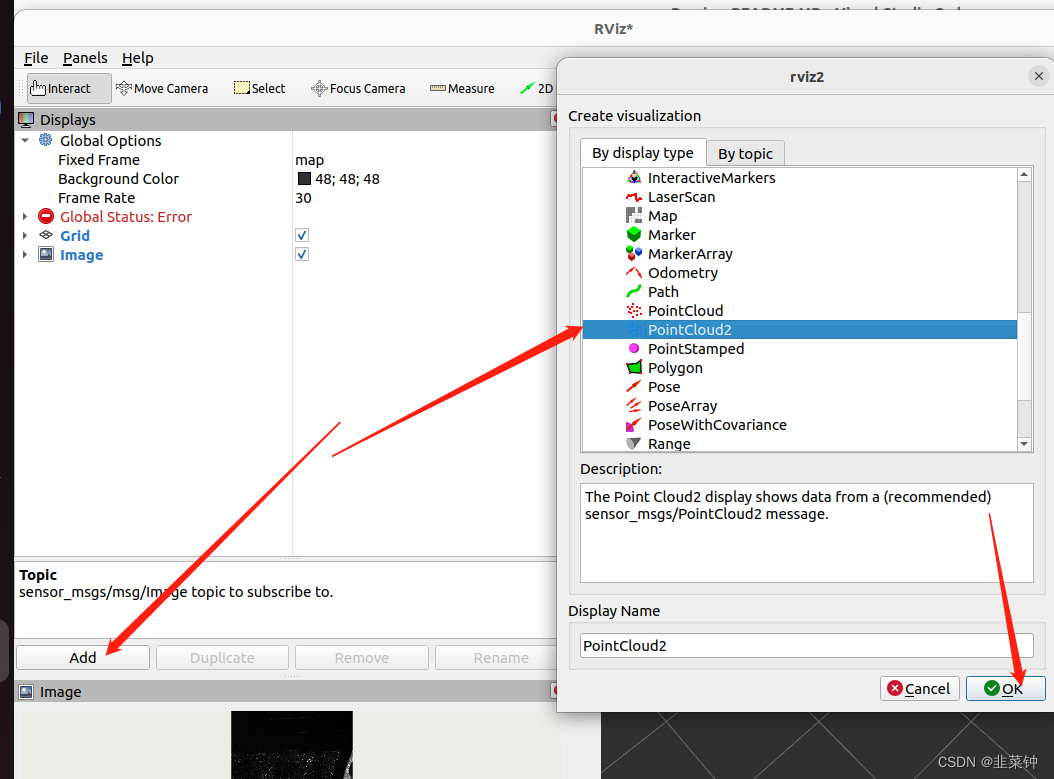 同样也要设置好各个参数
同样也要设置好各个参数
7.结语
既然可以得到深度图或者点云了,接下来就可以按照【ROS2中将octomap发布到Moveit中作为碰撞物体】中提到的办法,将他们转成octomap导入moveit进行路径规划了。完美(其实还有个手眼标定的问题…)。

![[网络工程师]-网络规划与设计-逻辑网络设计(四)](/images/no-images.jpg)
