开关电源——三种基本拓扑
开关电源基本原理——伏秒数法则与占空比
当电路是稳态电路的时候,有限的输入对应有限的输出,即电路不再积累能量,电感积累的能量是电压对时间的积分,在开关电源电路中,电感在开关导通和截止的两种情况下,两端电压恒定,又可以写作是 V × Δ t = L Δ I V \times \Delta t = L \Delta I V×Δt=LΔI 。也就是说,在一个周期内 Δ I O N = Δ I O F F = Δ I \Delta I_{ON} = \Delta I_{OFF} = \Delta I ΔION=ΔIOFF=ΔI 才能使得电路稳态,即稳态状态下开关导通加在电感两端的电压乘以导通时间等于开关截止加在电感两端的电压乘以关断时间,用方程表示为:
V O N × t O N = V O F F × t O F F V_{ON} \times t_{ON} = V_{OFF} \times t_{OFF} VON×tON=VOFF×tOFF
电压和时间的乘积称为伏秒数,我们称一个周期内导通和截止区间内的伏秒数相等,称为伏秒数法则。
我们定义占空比为,在一个周期内,开关导通的时间比上周期时间:
D = t O N T D = \frac{t_{ON}}{T} D=TtON
有一点需要值得注意的是, t O F F t_{OFF} tOFF 并不是开关的关断时间 T − t O N T - t_{ON} T−tON 而是电感反向电压的持续时间。若变换器是DCM变换器,则两个时间不等,存在空挡期。仅当在CCM变换器的时候有:
t O F F = T − t O N t_{OFF} = T - t_{ON} tOFF=T−tON
以及
D = t O N t O N + t O F F (CCM) D = \frac{t_{ON}}{t_{ON} + t_{OFF}} \text{(CCM)} D=tON+tOFFtON(CCM)
Buck-Boost
我们知道,Buck-Boost拓扑中,电感的一端接地,下图是标准Buck-Boost电路拓扑结构:
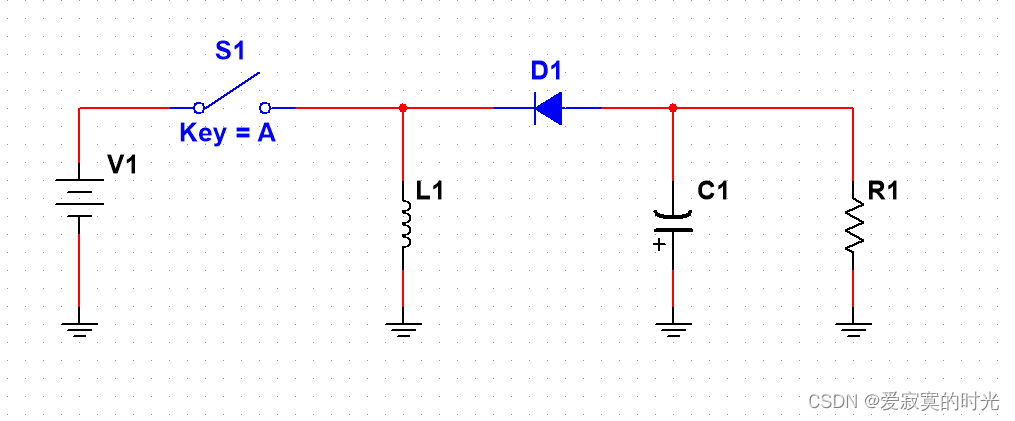
一开始,我们假设电容没有充电,当开关闭合的时候,电源开始给电感充能,二极管反向偏置截止,由于电感两端电压恒定为 V I N V_{IN} VIN ,那么充能电流上升的斜率为 V I N / L V_{IN} / L VIN/L 。当开关断开的时候,电感开始释放能量,二极管正向偏置,瞬间电感两端电压为二极管压降 V D V_D VD ,那么放能电流的下降斜率为 V D / L V_D / L VD/L 。由电感方程可知 Δ I O N > Δ I O F F \Delta I_{ON} > \Delta I_{OFF} ΔION>ΔIOFF ,电流开始递增,随着电容被充电,电流下降斜率不断增加,最后达到稳定状态 Δ I O N = Δ I O F F \Delta I_{ON} = \Delta I_{OFF} ΔION=ΔIOFF 。此时伏秒数相等。
其次,我们假设电流达到稳定状态,即输出电压为 V O V_{O} VO ,那么电感的导通、截止电压为:
V O N = V I N − V S W V_{ON} = V_{IN} - V_{SW} VON=VIN−VSW
V O F F = V O + V D V_{OFF} = V_O + V_D VOFF=VO+VD
其中 V S W V_{SW} VSW 是晶体管开关的导通压降,由伏秒数法则可知:
V I N × t O N = V O F F × t O F F V_{IN} \times t_{ON} = V_{OFF} \times t_{OFF} VIN×tON=VOFF×tOFF
导出占空比方程:
D = V O + V D V I N − V S W + V O + V D D = \frac{V_O + V_D}{V_{IN} - V_{SW} + V_O + V_D} D=VIN−VSW+VO+VDVO+VD
若开关和二极管压降远小于输入输出电压,则:
D ≃ V O V I N + V O D \simeq \frac{V_O}{V_{IN} +V_O} D≃VIN+VOVO
电压的传递表达式为:
V O = V I N × D 1 − D (buck-boost) V_O = V_{IN} \times \frac{D}{1-D} \text{(buck-boost)} VO=VIN×1−DD(buck-boost)
接下来分析平均电流之间的关系,当电流达到稳定状态的时候,根据Buck-Boost的电流波形:
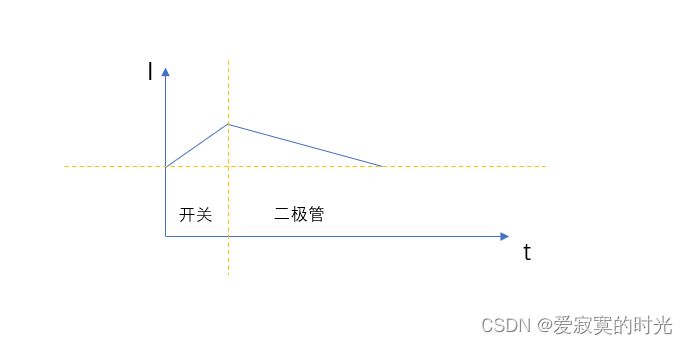
可知在一个周期内,我们记电感的平均电流为 I L I_L IL ,导出开关和二极管的平均电流关系:
I S W ˉ = I L × D \bar{I_{SW}} = I_L \times D ISWˉ=IL×D
I D ˉ = I L × ( 1 − D ) \bar{I_{D}} = I_L \times (1 - D) IDˉ=IL×(1−D)
电容的平均储存的电荷不再变化,因此通过电容的平均电流为零,那么通过二极管的平均电流必须和负载电流相等。则有:
I D ˉ = I O = I L × ( 1 − D ) \bar{I_{D}} = I_O = I_L \times (1 - D) IDˉ=IO=IL×(1−D)
于是:
I L = I O 1 − D I_L = \frac{I_O}{1 - D} IL=1−DIO
并且,输入电流等于开关平均电流,则电流的传递方程为:
I O = I I N × 1 − D D (buck-boost) I_O = I_{IN} \times \frac{1-D}{D} \text{(buck-boost)} IO=IIN×D1−D(buck-boost)
最后,我们需要注意Buck-Boost是一种反相器结构,即输出电压和输入电压的极性相反,而且Buck-Boost既可以升压也可以降压,这取决于占空比,例如正输入负输出的Buck-Boost电路可以将输入12V降为-5V或升压为-15V。
Boost
在Boost拓扑中,电感的一端和电压源的一端相连,如图:
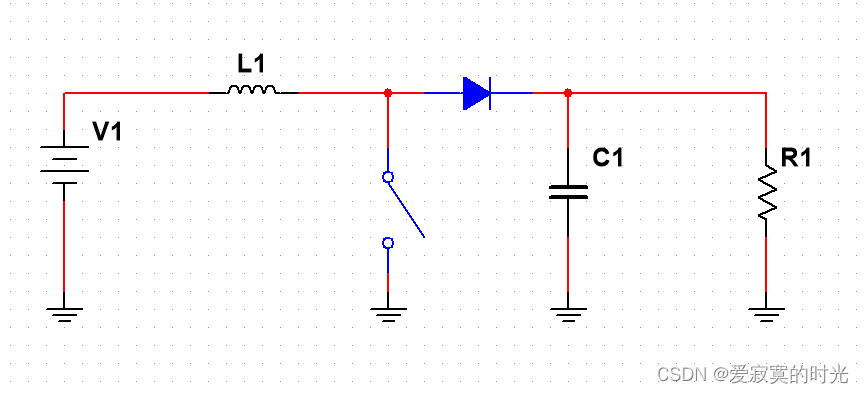
首先,开关闭合的时候,二极管反向截止,电压源只给电感充能,并且能量不会传递给负载端。开关断开的时候,电感储存的能量开始释放,同时电压源也给负载提供能量。
由于电容的在一个周期内的平均电流为零,因此二极管平均电流必须等于负载电流:
I D ˉ = I O = I L × ( 1 − D ) \bar{I_{D}} = I_O = I_L \times (1 - D) IDˉ=IO=IL×(1−D)
因此:
I L = I O 1 − D I_L = \frac{I_O}{1 - D} IL=1−DIO
又因为输入平均电流等于电感平均电流,因此:
I O = I I N × ( 1 − D ) (Boost) I_{O} = I_{IN} \times (1 - D) \text{(Boost)} IO=IIN×(1−D)(Boost)
接下来考虑电压关系,电感的开启和关断电压为:
V O N = V I N − V S W V_{ON} = V_{IN} - V_{SW} VON=VIN−VSW
V O F F = V O + V D − V I N V_{OFF} = V_O + V_D - V_{IN} VOFF=VO+VD−VIN
根据伏秒数法则:
t O F F t O N = V I N − V S W V O + V D − V I N \frac{t_{OFF}}{t_{ON}} = \frac{V_{IN} - V_{SW}}{V_O + V_D - V_{IN}} tONtOFF=VO+VD−VINVIN−VSW
带入占空比,可以得到:
D = V O + V D − V I N V O + V D − V S W D = \frac{V_O + V_D - V_{IN}}{V_O + V_D - V_{SW}} D=VO+VD−VSWVO+VD−VIN
若忽略二极管和开关的压降,得到:
D ≃ V O − V I N V O D \simeq \frac{V_O - V_{IN}}{V_O} D≃VOVO−VIN
则电压传导方程为:
V O = V I N × 1 1 − D (Boost) V_O = V_{IN} \times \frac{1}{1 - D} \text{(Boost)} VO=VIN×1−D1(Boost)
最后,我们需要注意Boost是一种同相器结构,即输出电压和输入电压的极性相同,由传导方程可知,输出电压大于输入电压,因此Boost是一种升压结构,升压比取决于占空比。
Buck
在Buck拓扑中,电感的一端和负载的一端相连,如图:
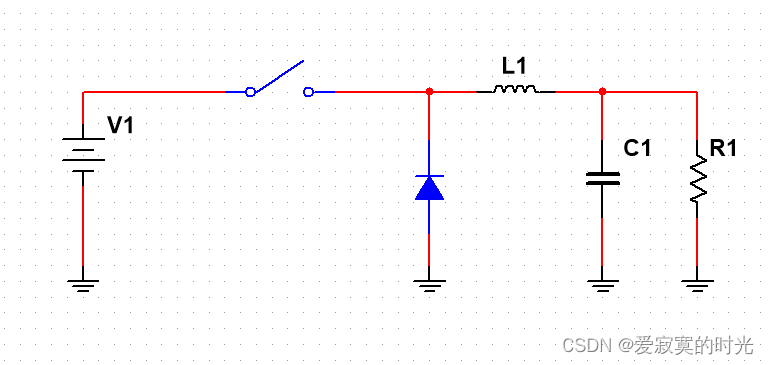
首先开关导通时电压源开始给电感充能,并且部分能量同时流入负载,二极管反向截止。当开关断开的时候,电感开始释放能量。开关关断时,电感储存的能量通过二极管传递给输出端,此时直流源不给负载提供能量。
因为电容的平均电流为零,因此Buck电路中的电感平均电流必须等于负载电流:
I L = I O I_L = I_O IL=IO
并且有:
I I N = I L × D I_{IN} = I_L \times D IIN=IL×D
则电流传递方程为:
I O = I I N D (Buck) I_O = \frac{I_{IN}}{D} \text{(Buck)} IO=DIIN(Buck)
使用伏秒数法则原理分析Buck变换器,可得:
V O N = V I N − V S W − V O V_{ON} = V_{IN} - V_{SW} - V_{O} VON=VIN−VSW−VO
V O F F = V O − ( − V D ) = V O + V D V_{OFF} = V_O - (-V_D) = V_O + V_D VOFF=VO−(−VD)=VO+VD
得到占空比:
D = V O + V D V I N + V D − V S W ≃ V O V I N D = \frac{V_O + V_D}{V_{IN} + V_D - V_{SW}} \simeq \frac{V_O}{V_{IN}} D=VIN+VD−VSWVO+VD≃VINVO
因此电压传递方程为:
V O = V I N × D (Buck) V_O = V_{IN} \times D \text{(Buck)} VO=VIN×D(Buck)